решение задач. Лекции. Кручение. Определение напряжений в стержнях круглого сечения.
Базовый курс лекций по сопромату, теория, практика, задачи.
::Оглавление::
2. Кручение.
2.2. Определение напряжений в стержнях круглого сечения.
Крутящие моменты, о которых шла речь выше, представляют лишь равнодействующие внутренние усилия. Фактически в поперечном сечении скручиваемого стержня действуют непрерывно распределенные внутренние касательные напряжения, к определению которых теперь и перейдем.
Ознакомимся прежде всего с результатами опытов. Если на поверхность стержня круглого сечения нанести прямоугольную сетку, то после деформации окажется (рис. 2.6):
1) прямоугольная сетка превратится в сетку, состоящую из параллелограммов, что свидетельствует о наличии касательных напряжений в поперечных сечениях бруса, а по закону парности касательных напряжений — и в продольных его сечениях;
2) расстояния между окружностями, например между I и II, не изменятся.
На основании этого можно принять, что при кручении в поперечных сечениях стержня действуют только касательные напряжения, т.е. напряженное состояние в точках скручиваемого стержня представляет собой чистый сдвиг.
Формулы, полученные на основе этого допущения, подтверждаются опытами. Точка D переместится по дуге DD’, точка C — по меньшей дуге CC’ (рис. 2.7).
Для установления закона распределения касательных напряжений по поперечному сечению скручиваемого стержня рассмотрим более детально деформации стержня (рис. 2.6 и 2.8). На рис. 2.8 в более крупном масштабе изображена часть стержня между сечениями I и II и показана одна сторона KN элемента KLMN (рис.
Угол сдвига для элемента KLMN, лежащего на поверхности стержня, равен отношению отрезка NN’ к длине элемента dz (см. рис. 2.8)
(2.1)
Выделяя мысленно из рассматриваемой части бруса цилиндр произвольного радиуса p и повторяя те же рассуждения, получим угол сдвига для элемента, отстоящего на расстоянии p от оси стержня
(2.2)
на основании закона Гука при сдвиге имеем
(2.3)
Как видим, при кручении деформации сдвига и касательные напряжения прямо пропорциональны расстоянию от центра тяжести сечения.
Эпюра касательных напряжений по поперечному сечению стержня представлена на рис. 2.7 справа.
В центре тяжести круглого сечения касательные напряжения равны нулю. Наибольшие касательные напряжения будут в точах сечения, расположенных у поверхности стержня.
Зная закон распределения касательных напряжений, легко определить их величину из учловия, что крутящий момент в сечении представляет собой равнодействующий момент касательных напряжений в сечении:
(2. 4)
4)
где ТрdA — элементарный крутящий момент внутренних сил, действующий по площадке dA.
Подставив в (2.4) значение напряжений из формулы (2.3) получим
(2.5)
Имея ввиду, что
(2.6)
где Ip — полярный момент инерции сечения, получим
(2.7)
Подставляя значение в формулу (2.3), имеем
(2.8)
В частном случае, когда на стержень действует один внешний скручивающий момент Т (рис. 2.9), из условия равновесия отсеченной части стержня получим Тк = Т.
Таким образом, окончательная формула для определения касательных напряжений при кручении имеет вид
(2.9)
Как видно из этой формулы, в точках, одинаково удаленных от центра сечения, напряжения одинаковы.
Наибольшие напряжения в точках у контура сечения равны
(2.10)
где
(2.11)
Геометрическая характеристика Wp называется полярным моментом сопротивления или моментом сопротивления при кручении.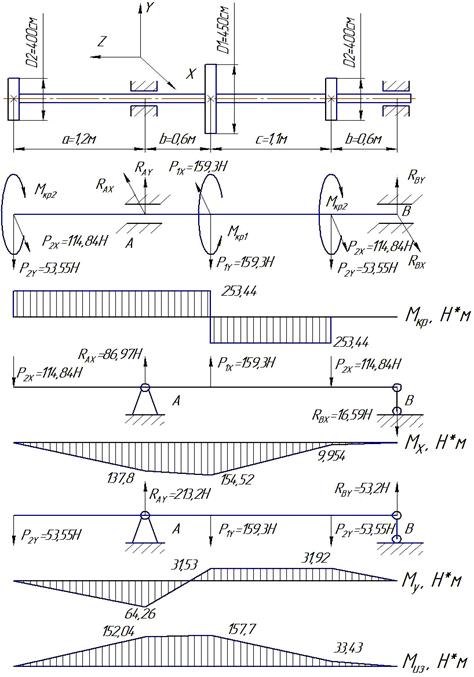
Для круглого сплошного сечения
(2.12)
Для колцевого сечения
(2.13)
где c = d/D.
Условие статической прочности вала при кручении имеет вид
(2.14)
Здесь — допускаемое касательное напряжение.
При действии статической нагрузки принимают (без учета концентрации напряжений и других факторов, снижающих прочность)
Кроме проверки прочности, по этой формуле можно также подбирать диаметр вала или определять допускаемыйкрутящий момент при известных остальных величинах.
Имея в виду, что для круглого сплошного сечения , получаем
(2.15)
По этой формуле определяют диаметр вала из условия прочности.
Допускаемый из условия прочности крутящий момент определяют по формуле
(2.16)
Касательные напряжения действуют не только в поперечных сечениях стержня, но и (как это следует из закона парности касательных напряжений) в продольных сечениях (рис.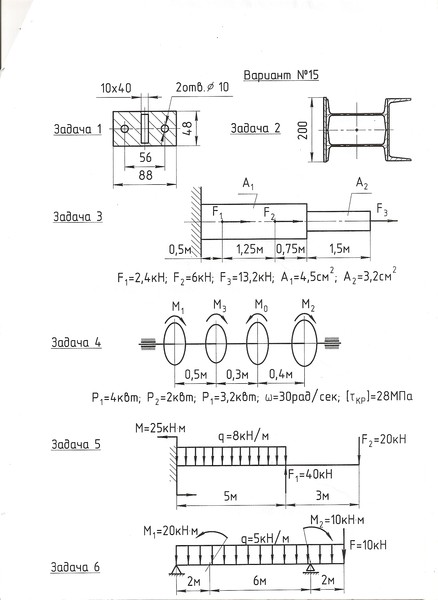 2.10).
2.10).
В наклонных же сечениях стержня действуют и нормальные и касательные напряжения. Они могут быть вычислены.
Опыты показывают, что хрупкие материалы, например чугун, при кручении разрушаются по плоскости (говоря точнее, по винтовой поверхности), наклоненной к оси вала под углом 45 градусов (рис. 2.11, б), т.е. по тем плоскостям, где действуют наибольшие растягивающие напряжения.
Следовательно, при кручении во всех точках стержня, кроме точек его оси (в которых вообще не возникает напряжений), имеет место двухосное напряженное состояние — чистый сдвиг. При кручении материал у поверхности стержня напряжен сильнее, чем материал, расположенный, ближе к оси стержня. Таким образом, напряженное состояние является неоднородным. Если же скручивать тонкостенную трубу, то можно считать, что практически во всех точках ее стенки возникают одинаковые напряжения, т.е. в этом случае напряженное состояние будет однородным. Опыты с кручением таких труб используют обычно для изучения чистого сдвига и, в частности, для установления предела текучести при сдвиге .
::Оглавление::
Меню сайта
Расчет балок на прочность он-лайн — построение эпюр Mx, Qy, нахождение максимального изгибающего момента Mx, максимальной
сдвигающей силы Qy, расчет прогибов, подбор профиля и др. Все просто, все он-лайн. Расчет рам, ферм балок он-лайн NEW — эпюры Q, M, N, перемещения узлов. Удобный графический интерфейс. Считает любые схемы. Лекции — теория, практика, задачи… Примеры решения задач
Справочная информация — ГОСТы, сортамент проката, свойства материалов и другое. Программы по сопромату (построение эпюр, различные калькуляторы, шпоры и другое). Форум сопромата и механики Книги — разная литература по теме. Заказать задачу Друзья сайта (ссылки) WIKIbetta Разработчикам (сотрудничество) Веб-мастерам (партнёрка) О проекте, контакты Подпроекты |
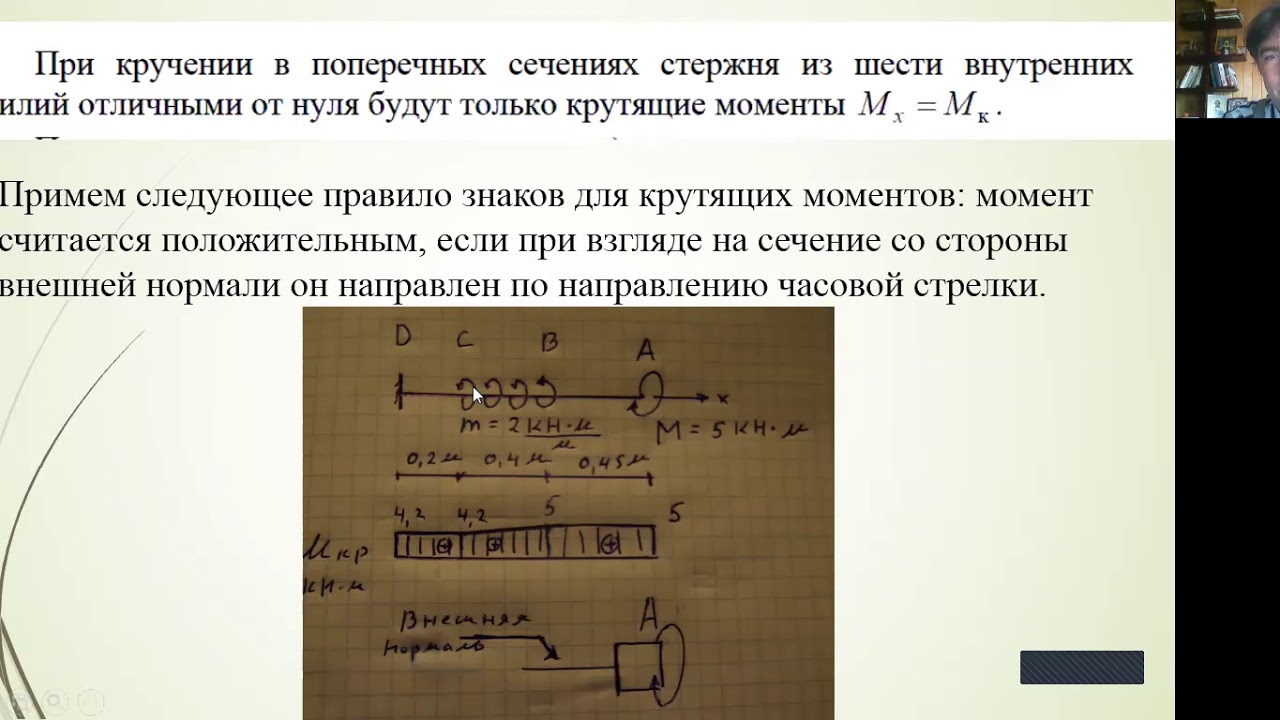
Базовый курс лекций по сопромату, теория, практика, задачи.::Оглавление:: 2. Кручение. 2.4. Построение эпюр угловых перемещений при кручении. Имея формулы для определения деформаций и зная условия закрепления стержня, нетрудно определить угловые перемещения сечений стержня и построить эпюры этих перемещений. Если имеется вал (т.е. вращающийся стержень), у которого нет неподвижных сечений, то для построения эпюры угловых перемещений принимают какое-либо сечение за условно неподвижное. Рассмотрим конкретный пример (рис. 2.12, а). На рис. 2.12, б дана эпюра Тк. Примем сечение в точке А за условно неподвижное. Определим поворот сечения В по отношению к сечению А. По формуле (2.20) (см. здесь) найдем где ТАВ — крутящий момент на участке АВ; lАВ — длина участка АВ. Примем следующее правило знаков для углов поворота сечений: углы будем считать положительными, когда сечение поворачивается (если смотреть вдоль оси справа налево) против часовой стрелки. В данном случае будет положительным. В принятом масштабе отложим ординату (рис. 2.12, в). Полученную точку К соединяем прямой точкой Е, так как на участке АВ углы изменяются по закону прямой линии [см. формулу 2.19, в которую абсцисса сечения z входит в первой степени]. Вычислим теперь угол поворота сечения С по отношению к сечению В. Учитывая принятое правило знаков для углов закручивания, получаем Так как сечение В не неподвижное, то угол поворота сечения С по отношению к сечению А равен Угол закручивания может получиться положительным, отрицательным и, в частном случае, равным нулю. Предположим, что в данном случае угол получился положительным. Тогда, отложив эту величину в принятом масштабе вверх от эпюры, получим точку М. Соединяя точку М с точкой К, получим графмк углов закручивания на участке ВС. На участке CD скручивания не происходит, так как крутящие моменты на этом участке равны нулю, поэтому там все сечения поворачиваются на столько же, на сколько поворачивается сечение С. Участок MN эпюры здесь горизонтален. Читателю предлагается убедиться, что если принять за неподвижное сечение В, то эпюра углов закручивания будет иметь вид, представленный на рис. 2.12, г. Пример 2.1. Определить диаметр стального вала, вращающегося с угловой скоростью W = 100 рад/с и передающего мощность N = 100 кВт. Допускаемо напряжение = 40 МПа, допускаемый угол закручивания = 0,5 град/м, G = 80000 МПа. Решение. Момент передаваемый валом, определяется по формуле T = N/W = 100 000 / 100 = 1000 Н * м Крутящий момент во всех поперечных сечениях вала одинаков Tк = Т = 1000 Н * м = 1 кН * м = 0,001 МН * м. Диаметр вала по прочности определяем по формуле (2.15) По формуле (2.24) определяем диаметр вала из условия жесткости Диаметр вала в данном случае определяется из условия жесткости и должен быть принят равным d = 52 мм. Пример 2.2. Подобрать размеры сечения трубчатого вала, передающего момент Т = 6 кН * м, при соотношении диаметров с = d/D = 0,8 и допускаемом напряжении = 60 МПа. Сравнить вес этого трубчатого вала с валом равной прочности сплошного сечения. Ответ. Размеры трубчатого вала: D = 9,52 см, d = 7,62 см. Плошадь сечения Ат = 25,9 квадратных см. Диаметр вала сплошного сечения d1 = 8 см. Площадь сечения Ас = 50,2 квадратных см. Масса трубчатого вала составляет 51% от массы сплошного вала. ::Оглавление:: |
СообществоВходРешение задачРасчет редукторовДля Android (рекомендую)NEW Mobile Beam 2.  0 0Программа для расчета балок на прочность на Вашем Android устройстве… Java 2 ME |



Расчет статически неопредилимого круглого вала работающего на кручение
Решение:Схема нагружения стержня представлена на рисунке. Освобождаем стержень от связей, заменяем их моментами в заделках — МА и МD
Условием равновесия стержня является только одно
Как видно, уравнение содержит две неизвестные. Задача является один раз статически неопределимой.
Дополнительное уравнение составим, рассматривая геометрическую сторону задачи. Условия деформации стержня состоят в том, что угол закручивания концевых сечений А и D равен нулю, т.е. .
Угол закручивания сечения А или сечения В определяется как сумма углов закручивания отдельных участков стержня.
Определим значения крутящих моментов в сечениях стержня, рассматривая отсеченные правые части.
Сечениями, где приложены внешние моменты, стержень разбивается на три участка I , II , III.
В произвольном сечении на участке I: ,
на участке II: Мкр II =МD + М ,
на участке III: Мкр III = МD + М + М
Угол закручивания сечения А или сечения D найдется как сумма углов закручивания отдельных участков стержня.
Определим значения крутящих моментов в сечениях стержня, рассматривая отсеченные правые части.
Углы закручивания на каждом участке запишутся на основании закона Гука
На участке DС:
На участке BD:
На участке AB:
Здесь Jp — полярные моменты инерции поперечных сечений вала.
Величины крутящих моментов на участках стержня равны:
По полученным значениям, строим эпюру крутящих моментов.
Диаметр стержня определим из условия прочности стержня при кручении
.
Наибольшая величина крутящего момента Mкр max = 144 Hм на участке
стержня АВ.
Построим эпюры углов закручивания и касательных напряжений.
Углы закручивания относительно неподвижного сечения
Определим наибольший момент.
Cкачать бесплатно пример решения задач — Расчет статически неопредилимого круглого вала работающего на кручение
Изгиб и кручение пространственного стержня
Ниже приведено условие и решение задачи. Закачка решения в формате doc начнется автоматически через 10 секунд.
Для заданного на рис. 10 пространственного стержня постоянного поперечного сечения диаметром d требуется :
1. Построить эпюры изгибающих и крутящих моментов ;
2. На каждом участке стержня выявить опасное сечение и составить условие прочности по третьей гипотезе прочности ;
3. Определить диаметр стержня при R=210 МПа.
Дано : F=20 кН ; q=1 кН/м ; a=51 см ; b=60 см ; c=40 см.
Решение.
1. Построим эпюры изгибающих и крутящих моментов.
Чтобы построить эпюры изгибающих моментов М и крутящих моментов Т, будем рассматривать участки стержня со стороны свободного конца. В этом случае не требуется определять опорные реакции в защемлении. Эпюра изгибающих моментов строится со стороны растянутых волокон.
На участке AB стержня сосредоточенная сила F приложена перпендикулярно продольной оси стержня и подвергает его плоскому изгибу. В сечении А изгибающий момент МА=0, в сечении B изгибающий момент MB=bF=0.6×20=12 кН·м. Этот участок стержня изгибается так, что растянуты нижние волокна. Поэтому ординаты эпюры М откладываем снизу от оси. На этом участке крутящий момент Т=0.
На участке CD стержня равномерно распределённая нагрузка q приложена вдоль продольной оси и подвергает его изгибу в вертикальной плоскости. Изгибающие моменты MC=0 ; MD=q(0.5a)2=1×(0.5×0.51)2=0.065 кН·м. Этот участок стержня изгибается так, что растянуты верхние волокна. Поэтому ординаты эпюры М откладываем вверх. Крутящий момент на этом участке Т=0.
На участке DE стержня равномерно распределённая нагрузка q приложена перпендикулярно продольной оси и подвергает его плоскому изгибу в вертикальной плоскости. Изгибающие моменты : MD=q(0.5a)2=1×(0.5×0.51)2=0.065 кН·м ; ME=0. Этот участок стержня изгибается так, что растянуты верхние волокна. Поэтому ординаты эпюры М откладываем вверх. Крутящий момент T=0.
На участке DB стержня сосредоточенная сила qa=1×0.51=0.51 кН приложена перпендикулярно продольной оси и подвергает его плоскому изгибу в вертикальной плоскости. Изгибающие моменты : MD=0 ; MB=qac=0.51×0.4=0.204 кН·м. Этот участок стержня изгибается так, что растянуты верхние волокна. Поэтому ординаты эпюры М откладываем вверх. Крутящий момент Т=0.
На участке BG изгибающий момент : MB=Fb=20×0.6=12 кН·м ; MG=F(a+b)-qa2=
=20×(0.51+0.6)-1×0.512=21.94 кН·м. Этот участок стержня изгибается так, что растянуты нижние волокна. Поэтому, ординаты эпюры М откладываем вниз. Крутящий момент Т=qac=1×0.51×0. 4=0.204 кН·м.
4=0.204 кН·м.
Эпюры показаны на рисунке.
На каждом участке стержня выявим опасное сечение и составим условие прочности по третей теории прочности.
На участке AB опасным сечением является сечение B, где изгибающий момент максимален. Условие прочности по третьей гипотезе прочности имеет вид :
где M3 – приведённый момент по третьей гипотезе прочности ; W – осевой момент сопротивления (для круглого сечения W=0.1d3).
M3= кН·м
где Мy – изгибающий момент в плоскости xz ; Mz – изгибающий момент в плоскости xy ; T – крутящий момент.
На участке BG опасным сечением является сечение G, где изгибающий момент наибольший :
M3= кН·м
На участке BD опасным сечением является сечение B, где изгибающий момент наибольший :
M3= кН·м.
На участке CE опасным сечением является сечение D :
M3= кН·м
Определим диаметр стержня. Для наиболее нагруженного сечения G :
Для наиболее нагруженного сечения G :
0.1d3=
Отсюда диаметр стержня : d= м=101 мм.
8.3. Изгиб с кручением
8.3. ИЗГИБ С КРУЧЕНИЕМ
Изгиб с кручением – вид сложного сопротивления, при котором в поперечном сечении бруса возникают изгибающие и крутящий моменты. Рассмотрим случай, при котором внешние силы располагаются в плоскости поперечного сечения, но не пересекают геометрическую ось х (рис. 8.12, а). Силу F разложим на ее составляющие Fz, Fy. Методом сечений определим внутренние усилия в произвольном сечении х (рис. 8.12, б). Спроецировав все силы на координатные оси и составив уравнения моментов относительно координатных осей, найдем внутренние усилия. Из шести внутренних усилий не равно нулю пять. На выделенном элементе В (рис. 8.12, б) показаны действующие по его граням напряжения (рис. 8.13, а). От поперечных сил и крутящего момента возникают касательные напряжения τQy, τQz, τT.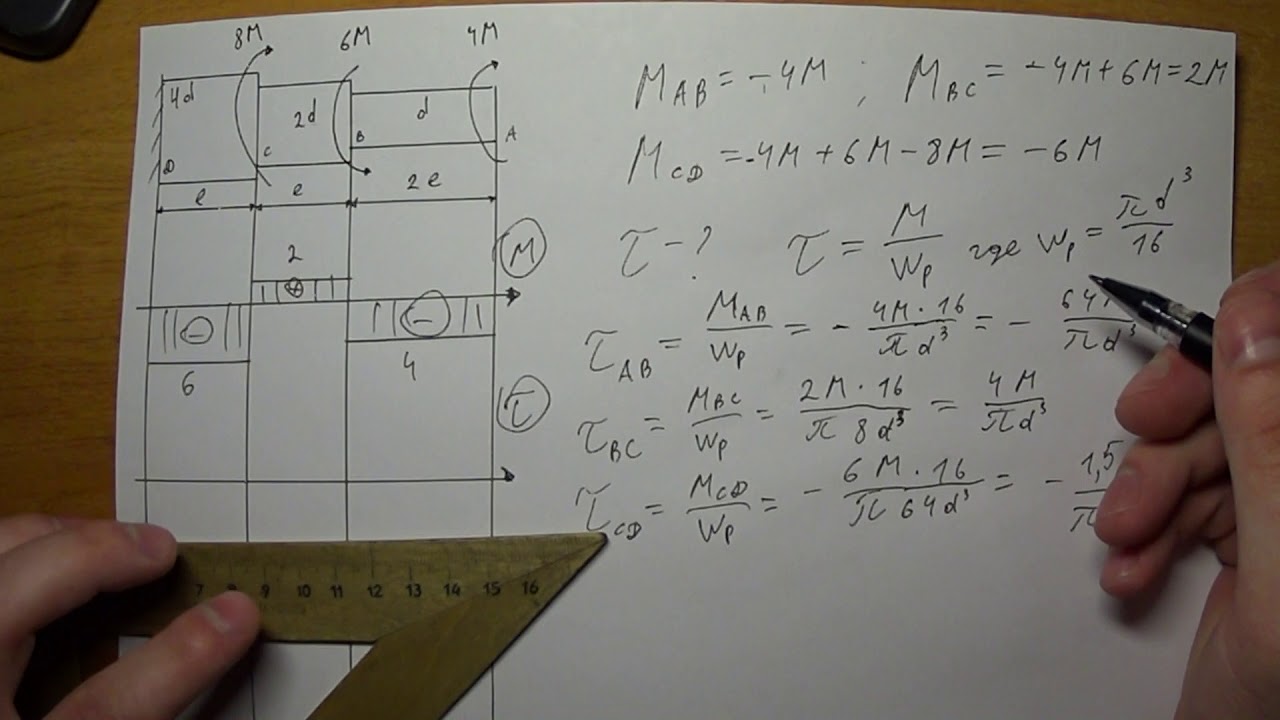 От изгибающих мо- ментов – нормальные напряжения σ′ и σ″. Для длинных валов и балок (ℓ > 10 d) влиянием поперечных сил часто пренебрегают. Таким образом, учитывают только три момента: крутящий и два изгибающих. От них возникают три напряжения: одно касательное и два нормальных (рис. 8.13, б). Расчет на прочность при изгибе с кручением Из рисунка 8.13, б следует, что в произвольном сечении возникает плоское напряженное состояние Рис. 8.12. Определение внутренних усилий при изгибе с кручением Рис. 8.13. Анализ напряженного состояния Как при изгибе, так и при кручении круглого сечения опасными являются точки на периферии. Для круга и кольца Условие прочности для пластичных материалов по III теории прочности (наибольших касательных напряжений): σэкв = σ1 − σ3 ≤ [σ] Поскольку для круглого и кольцевого сечений не существует точки, одинаково удаленной от обеих осей инерции z, y, то используют результирующий момент – геометрическую сумму векторов изгибающих моментов относительно осей z, y: Условие прочности при совместном действии изгиба и кручения: σ=≤[σ] Мприв – приведенный момент, действие которого эквивалентно совместному действию My, Mz, T в соответствии с используемыми теориями прочности.
От изгибающих мо- ментов – нормальные напряжения σ′ и σ″. Для длинных валов и балок (ℓ > 10 d) влиянием поперечных сил часто пренебрегают. Таким образом, учитывают только три момента: крутящий и два изгибающих. От них возникают три напряжения: одно касательное и два нормальных (рис. 8.13, б). Расчет на прочность при изгибе с кручением Из рисунка 8.13, б следует, что в произвольном сечении возникает плоское напряженное состояние Рис. 8.12. Определение внутренних усилий при изгибе с кручением Рис. 8.13. Анализ напряженного состояния Как при изгибе, так и при кручении круглого сечения опасными являются точки на периферии. Для круга и кольца Условие прочности для пластичных материалов по III теории прочности (наибольших касательных напряжений): σэкв = σ1 − σ3 ≤ [σ] Поскольку для круглого и кольцевого сечений не существует точки, одинаково удаленной от обеих осей инерции z, y, то используют результирующий момент – геометрическую сумму векторов изгибающих моментов относительно осей z, y: Условие прочности при совместном действии изгиба и кручения: σ=≤[σ] Мприв – приведенный момент, действие которого эквивалентно совместному действию My, Mz, T в соответствии с используемыми теориями прочности. По III теории прочности (наибольших касательных напряжений) Приведенного момента в действительности не существует, изобразить его нельзя, вектора он не имеет. Величина приведенного момента зависит от используемой теории прочности. Результаты расчетов по III и IV теориям прочности близки, отличаются примерно на 5–10 %. Пример 8.9. (Вольмир А. С. Сборник задач … 6.52). Вал с кривошипом подвергается действию силы F = 3,5 кН. Определить диаметр вала по третьей теории прочности при [σ] = 160 МПа; ℓ = 50 см, а = 10 см. Решение. Внутренние усилия определяем методом сечений. Рассекаем вал на две части в произвольном сечении х, Отбрасываем одну из частей (поз. б рисунка), Заменяем действие отброшенной части внутренними усилиями и в координатной системе xyz составляем У равнения статики: Строим эпюры изгибающего и крутящего моментов, действующих в поперечных сечениях вала (поз. в и г рисунка). Находим приведенный момент в опасном сечении – в защемлении: Из условия прочности при изгибе с кручением σ [σ] Округлив до большего значения, принимаем диаметр вала d = 50 мм.
По III теории прочности (наибольших касательных напряжений) Приведенного момента в действительности не существует, изобразить его нельзя, вектора он не имеет. Величина приведенного момента зависит от используемой теории прочности. Результаты расчетов по III и IV теориям прочности близки, отличаются примерно на 5–10 %. Пример 8.9. (Вольмир А. С. Сборник задач … 6.52). Вал с кривошипом подвергается действию силы F = 3,5 кН. Определить диаметр вала по третьей теории прочности при [σ] = 160 МПа; ℓ = 50 см, а = 10 см. Решение. Внутренние усилия определяем методом сечений. Рассекаем вал на две части в произвольном сечении х, Отбрасываем одну из частей (поз. б рисунка), Заменяем действие отброшенной части внутренними усилиями и в координатной системе xyz составляем У равнения статики: Строим эпюры изгибающего и крутящего моментов, действующих в поперечных сечениях вала (поз. в и г рисунка). Находим приведенный момент в опасном сечении – в защемлении: Из условия прочности при изгибе с кручением σ [σ] Округлив до большего значения, принимаем диаметр вала d = 50 мм.
Решение задач Задача 📝 на кручение Сопромат
1. Сколько стоит помощь?
Цена, как известно, зависит от объёма, сложности и срочности. Особенностью «Всё сдал!» является то, что все заказчики работают со экспертами напрямую (без посредников). Поэтому цены в 2-3 раза ниже.
2. Каковы сроки?
Специалистам под силу выполнить как срочный заказ, так и сложный, требующий существенных временных затрат. Для каждой работы определяются оптимальные сроки. Например, помощь с курсовой работой – 5-7 дней. Сообщите нам ваши сроки, и мы выполним работу не позднее указанной даты. P.S.: наши эксперты всегда стараются выполнить работу раньше срока.
3. Выполняете ли вы срочные заказы?
Выполняете ли вы срочные заказы?
Да, у нас большой опыт выполнения срочных заказов.
4. Если потребуется доработка или дополнительная консультация, это бесплатно?
Да, доработки и консультации в рамках заказа бесплатны, и выполняются в максимально короткие сроки.
5. Я разместил заказ. Могу ли я не платить, если меня не устроит стоимость?
Да, конечно — оценка стоимости бесплатна и ни к чему вас не обязывает.
6. Каким способом можно произвести оплату?
Работу можно оплатить множеством способом: картой Visa / MasterCard, с баланса мобильного, в терминале, в салонах Евросеть / Связной, через Сбербанк и т. д.
д.
7. Предоставляете ли вы гарантии на услуги?
На все виды услуг мы даем гарантию. Если эксперт не справится — мы вернём 100% суммы.
8. Какой у вас режим работы?
Мы принимаем заявки 7 дней в неделю, 24 часа в сутки.
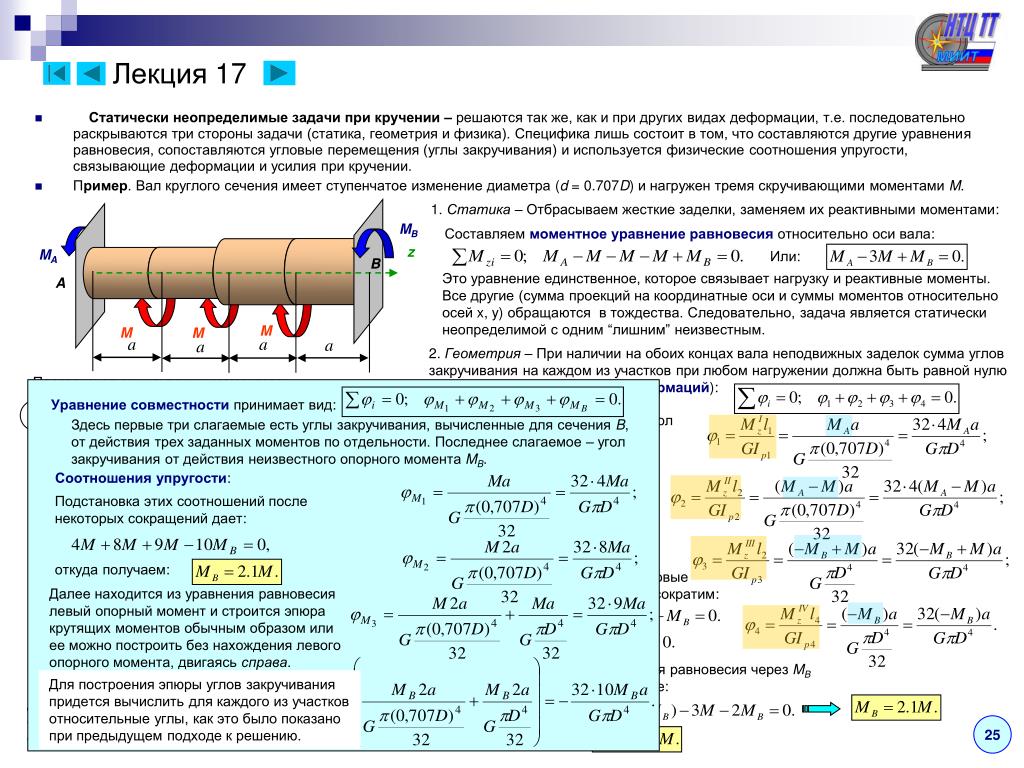
Кручение статически неопределимые задачи — Энциклопедия по машиностроению XXL
При кручении, так же как и при растяжении, встречаются задачи, которые не могут быть решены с помощью одних только уравнений равновесия. В таких задачах количество неизвестных превышает число уравнений равновесия. Порядок решения таких задач тот же самый, что и при решении статически неопределимых задач при растяжении (сжатии). [c.126]
[c.126]Для расчета статически неопределимых балок можно применить уже знакомый нам метод, который применялся для решения статически неопределимых задач при растяжении и кручении. [c.198]
СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ ЗАДАЧИ НА КРУЧЕНИЕ [c.127]
По программе курса ознакомление с расчетом статически неопределимых систем предусмотрено только в теме Растяжение и сжатие . Правда, отнюдь не запрещено решать статически неопределимые задачи на кручение, не выделяя их в отдельный теоретический вопрос, так как, по существу, теории здесь нет, а право преподавателя иллюстрировать курс теми задачами, какие он найдет нужными. [c.85]
Характер рассмотрения этого вопроса зависит в основном от выделяемого на его изучение числа часов. Если решено выделить 2 часа, то можно познакомить учащихся с принципиальным подходом к решению задач, который принято называть методом приравнивания перемещений, и решить две задачи, либо определяя перемещения тем способом, который был изучен, либо пользуясь табличными данными. Надо заметить, что приравнивание нулю перемещения в месте отброшенной опоры и применение принципа независимости сил не новы для учащихся. Этот же прием они применяли при решении статически неопределимых задач на растяжение (а может быть, и кручение). Поэтому надо добиться, чтобы учащиеся сами сказали, каков должен быть подход к раскрытию статической неопределимости.
[c.217]
Надо заметить, что приравнивание нулю перемещения в месте отброшенной опоры и применение принципа независимости сил не новы для учащихся. Этот же прием они применяли при решении статически неопределимых задач на растяжение (а может быть, и кручение). Поэтому надо добиться, чтобы учащиеся сами сказали, каков должен быть подход к раскрытию статической неопределимости.
[c.217]
Статически неопределимые задачи на кручение так же, как на растяжение и сжатие, включают в себя системы, в которых реакции закреплений и внутренние усилия не могут быть определены из условий статики. [c.86]
Статически неопределимые задачи при кручении [c.191]
Приведите примеры статически неопределимых задач на кручение и покажите, как составить для них уравнения перемещений. [c.207]
Метод решения статически неопределимых задач на кручение в принципе не отличается от решения таках задач на растяжение (сжатие). [c.184]
[c.184]
СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ ЗАДАЧИ КРУЧЕНИЯ [c.152]
Со статически неопределимыми задачами мы встречались уже при изучении растяжения, сжатия и кручения. При решении их всегда принимались во внимание деформации. [c.279]
Из (8.3.7) следует, что задача о стесненном кручении статически неопределима, так как распределение полного крутящего момента Л р на две части, равно как и определение напряжений am по (8.3.6), может быть выполнено только после нахождения функции ф(г) углов закручивания. Ниже это делается путем решения соответствующего дифференциального уравнения. [c.35]
СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ ЗАДАЧИ ПРИ КРУЧЕНИИ [c.118]
Отметим, что приведенный здесь вывод момента сопротивления кручению Wk и геометрического фактора жесткости составного сечения по существу является решением статически неопределимой задачи совместного кручения простых брусьев, составляющих брус сложного сечения. В этом решении соотношение (6.5.3) по существу является уравнением равновесия, а равенства (6.5.5) представляют собой уравнения совместности деформаций. Такая постановка не учитывает взаимодействия составляющих простых брусьев вдоль образующих, по которым опи соединены. Поэтому формулы (6.5.8), (6.5.10) дают несколько заниженную величину для геометрического фактора жесткости Jk и завышенную — для момента сопротивления Wk-
[c.142]
В этом решении соотношение (6.5.3) по существу является уравнением равновесия, а равенства (6.5.5) представляют собой уравнения совместности деформаций. Такая постановка не учитывает взаимодействия составляющих простых брусьев вдоль образующих, по которым опи соединены. Поэтому формулы (6.5.8), (6.5.10) дают несколько заниженную величину для геометрического фактора жесткости Jk и завышенную — для момента сопротивления Wk-
[c.142]
Последовательность решения статически неопределимой задачи на кручение рассмотрим на примере. [c.135]
Обший принцип решения статически неопределимых задач при кручении остается таким же, как и при растяжении и сжатии. Вначале составляются уравнения равновесия, а недостаю- [c.142]
Неизбежная специфичность статически неопределимых задач в каждом из упомянутых трех случаев заключается лишь в том, что каждый раз меняется вид перемещений. В разделе растяжения это были линейные перемещения вдоль оси бруса. В настоящем случае (кручение) это будут углы поворота вокруг оси бруса.
[c.100]
В настоящем случае (кручение) это будут углы поворота вокруг оси бруса.
[c.100]
Таким образом, имеется статически неопределимая задача кручения с распределенным моментом турбины и двумя неизвестными реактивными моментами в точках А и В (фиг. 3, а, б). Для определения моментов Мл и составим уравнение совместности угловых деформаций корпуса и системы статоров. [c.48]
Статически неопределимые задачи при кручении в практической деятельности встречаются достаточно редко. Решаются они подобно задачам первого типа при ра- [c.521]
Расчет корневой части Крыла на кручение является многократно статически неопределимой задачей вследствие большого количества связей между элементами конструкции. Действительно, крутящий момент [c.206]
Рассмотрим решение статически неопределимой задачи на кручение. [c.94]
Приведем пример использования изложенного метода. На рис. 3. 11, а показано поперечное сечение тонкостенного стержня, испытывающего деформацию свободного кручения моментом М. Сечение замкнутое двухконтурное. В этом случае задача определения касательных напряжений г статически неопределима. Решим ее с помощью принципа Кастильяно.
[c.66]
11, а показано поперечное сечение тонкостенного стержня, испытывающего деформацию свободного кручения моментом М. Сечение замкнутое двухконтурное. В этом случае задача определения касательных напряжений г статически неопределима. Решим ее с помощью принципа Кастильяно.
[c.66]
Перечисленные вопросы представляют собой план-минимум. Можно добавить задачи, связанные с вычислением потенциальной энергии деформации при кручении, с различными случаями расчета статически неопределимых систем. [c.16]
Обычно начинают с расчета бруса с заделкой обоих концов. Такие примеры приведены в большинстве учебников и пособий. Соответствующая задача должна решаться методом сил, т. е. в качестве лишней неизвестной надо принять реакцию одной из заделок. Уравнение перемешений выражает ту мысль, что суммарное (от действия заданных нагрузок и искомой реакции) перемещение сечения заделке равно нулю. Кстати заметим, что такие же уравнения перемещений используются при расчетах на кручение брусьев, заделанных двумя концами, и при раскрытии статической неопределимости балок. [c.86]
[c.86]
Вновь возвращаясь к вопросу о статически неопределимых случаях расчета на кручение, повторяем, что целесообразно решить одну-две такие задачи, показав не только раскрытие статической неопределенности, но и включив какие-либо вопросы расчетов на прочность. [c.108]
Наиболее распространенной статически неопределимой задачей на кручение является задача на кручение стержня, жестко заделанногоiс двух концов. [c.127]
Как известно из предыдущего, расчет на жесткость элемента конструкции, имеющего форму бруса, заключается в определении наибольших перемещений его поперечных сечений и сопоставлении их с допускаемьми, зависящими от назначения и условий эксплуатации данного элемента. Например, рассчитывая вал на жесткость при кручении, ограничивают углы поворота поперечных сечений вокруг его продольной оси. Напомним также, что решение статически неопределимых задач на растяжение (сжатие) и на кручение связано с составлением уравнений перемещений, т. е. по существу, с определением в первом случае линейных, во втором — угловых перемещений поперечных сечений рассчитываемых брусьев.
[c.275]
е. по существу, с определением в первом случае линейных, во втором — угловых перемещений поперечных сечений рассчитываемых брусьев.
[c.275]
Статически неопределимые задачи на кручение так же, как на растяжение и сжатие, включают в себя системы, в которых реакции закреплений и внутренние усилия не могут быть определены из уравнений статики. Расчет таких систем производят путем использования дополнительно к условиям статики условий совместности перемещений, основанных на неразъединимости элементов, составляющих систему, и представляющих собой геометрические зависимости между перемещениями элементов, входящ.чх в систему. [c.70]
При кручении, как и при других видах деформации, встречаются такпе случаи, когда уравнений статики недостаточно для определения внутренних усилий — крутящих моментов. При этом для решения задач приходится использовать условия деформации.
 Такие задачи называются статически неопределимыми в принципе их решение не отличается от рассмотренных выше статически неопределимых задач на растяжение (сжатие).
[c.135]
Такие задачи называются статически неопределимыми в принципе их решение не отличается от рассмотренных выше статически неопределимых задач на растяжение (сжатие).
[c.135]Ясно, что установить их значение статическим путем невозможно, и этб липший раз подтверждает статическую неопределимость задачи о стесненном кручении. Найтн их можно только выразив напряжения Оа через [c.323]
Сказанное является выражением статической неопределимости задачи о стесненном кручении тонкостенного стержня с закрытым профилем и по существу вытекает из отсутствия граничного условия для функции (т г )о- данном случае это усясшие не может быть заменено условием периодичности, так как последнее при сохранении заимствованной зависимости перемещения w от дуги s удовлетворяется тождественно в этом можно убедиться при обходе всего контура в выражении (21). [c.114]
Алгоритм расчетов на изгиб и кручение статически неопределимых систем реализован в программе Batan . exe. Программа построена на диалоге с пользователем, которому предоставляется возможность вводить исходные данные и обрабатывать их надлежащим образом. Удобное меню позволяет в любой момент изменять имя или название задачи, входные данные и получить результат.
[c.41]
exe. Программа построена на диалоге с пользователем, которому предоставляется возможность вводить исходные данные и обрабатывать их надлежащим образом. Удобное меню позволяет в любой момент изменять имя или название задачи, входные данные и получить результат.
[c.41]
Сопротивление скручиванию – обзор
В базовой модели частично пластифицированные участки не учитываются. Расчетный момент сопротивления кручению Τ I,max определяется следующим образом:
усиленные, круглого сечения:
(14,26)ΤI,max=2⋅π⋅r∫0rv2τr⋅
с:
(14.27)τr=τfc,maxrv⋅r
| τ c,max | Максимальное напряжение сдвига (старого) бетона; приблизительно соответствует пределу прочности при растяжении |
|---|---|
| τ fc,max | зернистый бетон дает реалистичные результаты (Schladitz, 2011) |
для прямоугольных железобетонных сечений:
(14. 28) τi, max = ∫aτxzyz⋅y-τxyyz⋅zda
28) τi, max = ∫aτxzyz⋅y-τxyyz⋅zda
с:
(14.29) τxyyz = -8⋅g⋅θ⋅bv⋅Σn = 0∞-1n2n + 12π2Cosh3n + 1πHV2BVCOS2N + 1πybvsinh3n + 1πzbv
(14.30)τxzyz=8⋅G⋅ϑ⋅bv⋅y4−∑n=0∞bv−1n2n+12π2cosh3n+1πhv2bvcos2n+1πybvsinh3n+1πzbv
(14.31)G⋅ϑ=⋅τfc,max−8 N = 0∞12N + 12π2COSH3N + 1πHV2BV
с:
| G | ||
|---|---|---|
| θ | оси скручивания поперечного сечения | |
| A | Площадь поперечного сечения | |
| N | NБегущий индекс |
После этого можно определить сдвиг τ ( y , Z ) прямоугольного железобетонного сечения:
(14.32)τyz=τxyyz2+τxzyz2
Тогда напряжения сдвига τ ( r ) или τ ( y , z ) старого сечения бетона ограничиваются до значения c,max старого бетона, чтобы показать области пластификации:
(14,33)τc,max≥τrτyzforr≤rcy Для расчета представленной модели требуется компьютерная помощь. Поэтому в следующей главе представлена упрощенная модель.
Поэтому в следующей главе представлена упрощенная модель.
%PDF-1.5 % 1 0 объект > эндообъект 2 0 объект > эндообъект 3 0 объект > /Родитель 1 0 Р /StructParents 0 /Ресурсы > /Шрифт > /ProcSet [/PDF /Text /ImageB /ImageC /ImageI] >> /MediaBox [0 0 612 792] /Вкладки /S /Тип /Страница /Содержание 29 0 Р >> эндообъект 4 0 объект > /Родитель 1 0 Р /StructParents 1 /Ресурсы > /Шрифт > /ProcSet [/PDF /Text /ImageB /ImageC /ImageI] >> /MediaBox [0 0 612 792] /Вкладки /S /Тип /Страница /Содержание 30 0 р >> эндообъект 5 0 объект > /Родитель 1 0 Р /StructParents 2 /Ресурсы > /Шрифт > /XОбъект > /ProcSet [/PDF /Text /ImageB /ImageC /ImageI] >> /MediaBox [0 0 612 792] /Вкладки /S /Тип /Страница /Содержание 33 0 Р >> эндообъект 6 0 объект > /Родитель 1 0 Р /StructParents 3 /Ресурсы > /ProcSet [/PDF /Text /ImageB /ImageC /ImageI] >> /MediaBox [0 0 612 792] /Вкладки /S /Тип /Страница /Содержание 37 0 Р >> эндообъект 7 0 объект > /Родитель 1 0 Р /StructParents 4 /Ресурсы > /Шрифт > /ProcSet [/PDF /Text /ImageB /ImageC /ImageI] >> /MediaBox [0 0 612 792] /Вкладки /S /Тип /Страница /Содержание 39 0 Р >> эндообъект 8 0 объект > /Родитель 1 0 Р /StructParents 5 /Ресурсы > /Шрифт > /XОбъект > /ProcSet [/PDF /Text /ImageB /ImageC /ImageI] >> /MediaBox [0 0 612 792] /Вкладки /S /Тип /Страница /Содержание 42 0 Р >> эндообъект 9 0 объект > /Родитель 1 0 Р /StructParents 6 /Ресурсы > /Шрифт > /XОбъект > /ProcSet [/PDF /Text /ImageB /ImageC /ImageI] >> /MediaBox [0 0 612 792] /Вкладки /S /Тип /Страница /Содержание 45 0 Р >> эндообъект 10 0 объект > /Родитель 1 0 Р /StructParents 7 /Ресурсы > /Шрифт > /ProcSet [/PDF /Text /ImageB /ImageC /ImageI] >> /MediaBox [0 0 612 792] /Вкладки /S /Тип /Страница /Содержание 46 0 Р >> эндообъект 11 0 объект > /Родитель 1 0 Р /StructParents 8 /Ресурсы > /Шрифт > /XОбъект > /ProcSet [/PDF /Text /ImageB /ImageC /ImageI] >> /MediaBox [0 0 612 792] /Вкладки /S /Тип /Страница /Содержание 49 0 Р >> эндообъект 12 0 объект > /Родитель 1 0 Р /StructParents 9 /Ресурсы > /Шрифт > /XОбъект > /ProcSet [/PDF /Text /ImageB /ImageC /ImageI] >> /MediaBox [0 0 612 792] /Вкладки /S /Тип /Страница /Содержание 51 0 Р >> эндообъект 13 0 объект > /Родитель 1 0 Р /StructParents 10 /Ресурсы > /Шрифт > /XОбъект > /ProcSet [/PDF /Text /ImageB /ImageC /ImageI] >> /MediaBox [0 0 612 792] /Вкладки /S /Тип /Страница /Содержание 54 0 Р >> эндообъект 14 0 объект > /Родитель 1 0 Р /StructParents 11 /Ресурсы > /Шрифт > /ProcSet [/PDF /Text /ImageB /ImageC /ImageI] >> /MediaBox [0 0 612 792] /Вкладки /S /Тип /Страница /Содержание 56 0 Р >> эндообъект 15 0 объект > /Родитель 1 0 Р /StructParents 12 /Ресурсы > /Шрифт > /XОбъект > /ProcSet [/PDF /Text /ImageB /ImageC /ImageI] >> /MediaBox [0 0 612 792] /Вкладки /S /Тип /Страница /Содержание 59 0 Р >> эндообъект 16 0 объект > /Родитель 1 0 Р /StructParents 13 /Ресурсы > /Шрифт > /XОбъект > /ProcSet [/PDF /Text /ImageB /ImageC /ImageI] >> /MediaBox [0 0 612 792] /Вкладки /S /Тип /Страница /Содержание 63 0 Р >> эндообъект 17 0 объект > /Родитель 1 0 Р /StructParents 14 /Ресурсы > /Шрифт > /XОбъект > /ProcSet [/PDF /Text /ImageB /ImageC /ImageI] >> /MediaBox [0 0 612 792] /Вкладки /S /Тип /Страница /Содержание 66 0 Р >> эндообъект 18 0 объект > /Родитель 1 0 Р /StructParents 15 /Ресурсы > /Шрифт > /XОбъект > /ProcSet [/PDF /Text /ImageB /ImageC /ImageI] >> /MediaBox [0 0 612 792] /Вкладки /S /Тип /Страница /Содержание 68 0 Р >> эндообъект 19 0 объект > /Родитель 1 0 Р /StructParents 16 /Ресурсы > /Шрифт > /ProcSet [/PDF /Text /ImageB /ImageC /ImageI] >> /MediaBox [0 0 612 792] /Вкладки /S /Тип /Страница /Содержание 69 0 Р >> эндообъект 20 0 объект > /Родитель 1 0 Р /StructParents 17 /Ресурсы > /Шрифт > /ProcSet [/PDF /Text /ImageB /ImageC /ImageI] >> /MediaBox [0 0 612 792] /Вкладки /S /Тип /Страница /Содержание 70 0 Р >> эндообъект 21 0 объект > эндообъект 22 0 объект > /XОбъект > /ProcSet [/PDF /текст /ImageC] >> эндообъект 23 0 объект > ручей xmUK6WEjEMf[i90eHόSf83dQ?oIz y]D}abѽ ?n ?bKAIaUK2d
15 примеров силы кручения в повседневной жизни – StudiousGuy
Сила, возникающая при скручивании одного конца объекта при одновременном вращении другого конца в противоположном направлении или удерживании его в фиксированном положении, известна как сила кручения. Реакция на силу кручения зависит от природы объекта. Например, хрупкий объект разрушается, упругий объект восстанавливает свою первоначальную форму, как только снимается сила, гибкий объект деформируется и т. д.Сила кручения отвечает за скручивание или поворот объекта. Она также известна как сила кручения. В отсутствие крутящего момента и кручения объекты могли бы демонстрировать только линейное движение. Сила кручения или крутящий момент — это момент силы, который можно легко рассчитать, умножив силу, действующую на объект, на расстояние между точкой отсчета и объектом.
Реакция на силу кручения зависит от природы объекта. Например, хрупкий объект разрушается, упругий объект восстанавливает свою первоначальную форму, как только снимается сила, гибкий объект деформируется и т. д.Сила кручения отвечает за скручивание или поворот объекта. Она также известна как сила кручения. В отсутствие крутящего момента и кручения объекты могли бы демонстрировать только линейное движение. Сила кручения или крутящий момент — это момент силы, который можно легко рассчитать, умножив силу, действующую на объект, на расстояние между точкой отсчета и объектом.
Указатель статей (щелкните, чтобы перейти)
Примеры 1. Двери и петли В большинстве гаражных ворот используется система пружин кручения.Пружина кручения расположена горизонтально над дверью, что позволяет двери вернуться в исходное положение после перемещения. Когда дверь гаража опускается, пружины, прикрепленные к двери, накапливают в себе значительное количество энергии. При подъеме двери вверх эта накопленная энергия помогает легко открыть дверь.
При подъеме двери вверх эта накопленная энергия помогает легко открыть дверь.
Ряд приложений, таких как кинотеатры, театры, стадионы и т. д.используйте выдвижные сиденья, потому что они удобны и помогают сэкономить место. Эти сиденья имеют механическое расположение торсионных пружин, прикрепленных к основанию, что помогает им автоматически складываться, когда они не используются. Помимо экономии места, это также помогает легко очистить территорию.
3. Буфер обменаБуфер обмена состоит из торсионной пружины, которая косвенно воздействует на зажим, установленный в верхней части доски, и помогает удерживать бумаги на месте.На пружину действует внешнее усилие, вызывающее ее деформацию. Деформация, вызванная пружиной, ответственна за накопление в ней механической энергии. Эта накопленная энергия отвечает за выполнение основной функции буфера обмена.
4.
 Медицинское оборудование
Медицинское оборудование Сила кручения используется в ряде медицинских приложений для выполнения различных сложных и утомительных задач. Например, больничные койки, иммобилизационные устройства, инвалидные коляски и т. д.Пружины, используемые в этих приложениях, сохраняют силу кручения для своей работы. Также криволинейное и гибкое движение такого оборудования возможно только из-за существования силы кручения.
5. Потолочный светильникВ системе светильников на потолке и стенах используются две торсионные пружины, удерживающие лампу на месте. Механизм, используемый в осветительной арматуре, достаточно гибкий, чтобы снимать и устанавливать источник света в соответствии с удобством.Две пружины, присутствующие в держателе, расположены параллельно друг другу для лучшего захвата.
6. Часы Сила кручения находит свое основное применение в маятниковых часах. Торсионная пружина, прикрепленная к часам, обеспечивает непрерывное движение маятника вперед и назад. К краю маятника подвешен груз, который помогает ему перемещаться на одинаковое расстояние в обе стороны.
К краю маятника подвешен груз, который помогает ему перемещаться на одинаковое расстояние в обе стороны.
В тканевой булавке используется торсионная пружина.Пружины кручения имеют спиральную форму и способны накапливать усилие кручения. Пружина кручения правильно встроена в структуру тканевого стержня. При приложении механической силы эта структура деформируется. Деформация помогает булавке прижиматься к одежде.
8. АвтомобильнаяСила кручения способствует плавному движению автомобиля без трения. Пружины кручения используются в ряде частей автомобиля, таких как шасси, коробка передач, сцепление, система подвески и т. д.Одно из основных применений силы кручения можно ясно увидеть на рулевом колесе автомобиля. В отсутствие скручивающей силы рулевое управление было бы жестким и не могло поддерживать движение по криволинейному направлению.
9. Открытие бутылки
Открытие бутылки Чтобы открыть бутылку, нужно повернуть крышку в обратном направлении, чтобы раскрутить ее. Это делается путем приложения внешней силы к крышке. Это приводит к развитию торсионной силы, поддерживающей как открытие, так и закрытие бутылки.
10. Гаечный ключГаечный ключ обычно используется для затягивания или откручивания комбинации гайки и болта. Верхняя часть ключа сконструирована таким образом, что она правильно подходит к гайке. При подаче на ключ вращательного движения он также подводится к гайке; тем самым позволяя человеку ослабить или затянуть комбинацию.
11. Открытие банкиОткрывая банку, крепко держите крышку и прикладываете усилие закручивания, чтобы повернуть ее.Сила закручивания помогает крышке ослабнуть, чтобы ее можно было легко снять.
12. Поворотная ручка приборов Для включения газа поворачивается ручка горелки. Это вращение происходит, когда человек прикладывает силу скручивания или кручения. Многие другие кухонные приборы используют аналогичную силу скручивания для своих операций. Например, включение ручки миксера-измельчителя, увеличение времени работы микроволновки и т. д.
Это вращение происходит, когда человек прикладывает силу скручивания или кручения. Многие другие кухонные приборы используют аналогичную силу скручивания для своих операций. Например, включение ручки миксера-измельчителя, увеличение времени работы микроволновки и т. д.
Винт состоит из металлической головки и множества резьбовых нарезов на ее поверхности. Когда заостренный конец винта помещается на верхнюю часть твердой поверхности и прикладывается сила скручивания, чтобы повернуть его в определенном направлении, он внедряется внутрь конструкции. При приложении силы кручения в противоположном направлении он расстегивается и выходит из конструкции. Это закрепляющее и отвинчивающее действие винта зависит от типа и количества витков резьбы на поверхности винта.
14. Сворачивание игрушки Ряд игрушек, доступных на рынке, использует для своей работы силу кручения. Они состоят из ключа, который необходимо повернуть несколько раз, а затем отпустить, чтобы игрушка могла двигаться.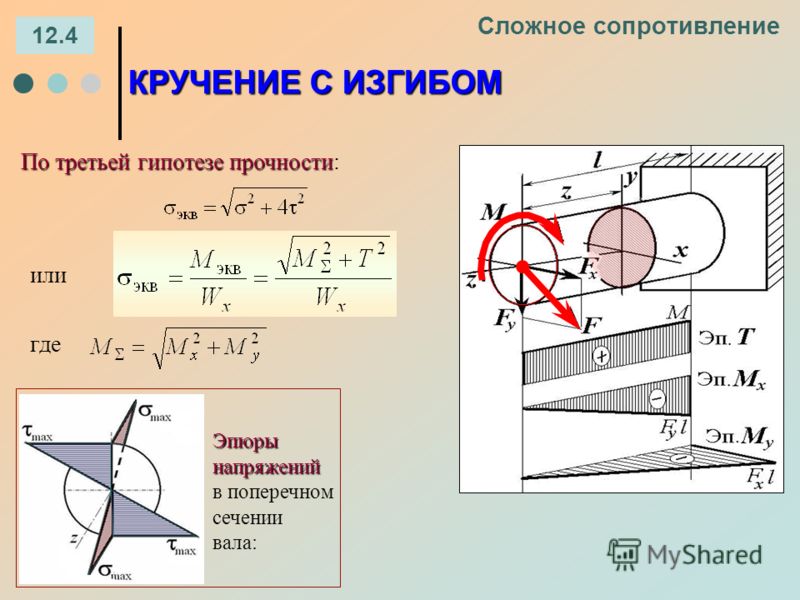 Энергия, вырабатываемая при заводке игрушки, хранится в ключе. Затем эта энергия используется, чтобы вызвать движение игрушки.
Энергия, вырабатываемая при заводке игрушки, хранится в ключе. Затем эта энергия используется, чтобы вызвать движение игрушки.
Традиционные радиоприемники состояли из одной или нескольких ручек для настройки.Правильный сигнал отслеживается регулировкой положения ручек. Это достигается приложением значительного усилия поворота к ручкам настройки.
(PDF) Внутреннее сопротивление скручиванию в отклоненных валах
Вал представляет собой вращающийся элемент машины, который используется для передачи движения. Он обеспечивает ось вращения или колебания таких элементов, как шестерни, шкивы, маховики, кривошипы, звездочки и т.п., и управляет геометрией их движения.Мощность передается на вал некоторой касательной силой, а результирующий крутящий момент (или крутящий момент), создаваемый внутри вала, позволяет передавать мощность на различные механизмы, связанные с валом.
Поскольку прогиб является функцией геометрии, анализ прогиба и уклона не может быть завершен до тех пор, пока не будет четко определена геометрия всего вала. Следовательно, в первую очередь принимается во внимание конструкция вала, затем можно определить прогибы и уклоны.Большинство теорий валов основывали свой анализ на изгибающем моменте, крутящем моменте или их комбинации. Тем не менее, на динамическое поведение связанных изгибно-крутильных колебаний вращающихся валов влияют силы внутреннего сопротивления, возникающие из-за кручения. Ожидается, что отклоненные валы будут подвергаться этому сопротивлению. Эти силы ранее не учитывались при анализе.
Целью данной работы является оценка величины внутреннего сопротивления кручению в отклоненных валах.Для решения этой задачи была построена экспериментальная установка для проверки существования сопротивления кручению в отклоненных валах и его изменения с углом поворота.
Для оценки изменения внутреннего сопротивления кручению вала были выполнены различные отклонения от его центральной точки. Кроме того, изучается влияние изменения скорости, а также выводится приблизительная оценка. Однако в этом исследовании эффектом завихрения пренебрегают.
Следовательно, в первую очередь принимается во внимание конструкция вала, затем можно определить прогибы и уклоны.Большинство теорий валов основывали свой анализ на изгибающем моменте, крутящем моменте или их комбинации. Тем не менее, на динамическое поведение связанных изгибно-крутильных колебаний вращающихся валов влияют силы внутреннего сопротивления, возникающие из-за кручения. Ожидается, что отклоненные валы будут подвергаться этому сопротивлению. Эти силы ранее не учитывались при анализе.
Целью данной работы является оценка величины внутреннего сопротивления кручению в отклоненных валах.Для решения этой задачи была построена экспериментальная установка для проверки существования сопротивления кручению в отклоненных валах и его изменения с углом поворота.
Для оценки изменения внутреннего сопротивления кручению вала были выполнены различные отклонения от его центральной точки. Кроме того, изучается влияние изменения скорости, а также выводится приблизительная оценка. Однако в этом исследовании эффектом завихрения пренебрегают. или, другими словами, можно рассматривать как не влияющий на вал, поскольку он позволяет валу вращаться вокруг своей оси.
Например, на внутреннее сопротивление кручению каким-то образом влияет увеличение как величины отклонения, так и угловой скорости вала.
или, другими словами, можно рассматривать как не влияющий на вал, поскольку он позволяет валу вращаться вокруг своей оси.
Например, на внутреннее сопротивление кручению каким-то образом влияет увеличение как величины отклонения, так и угловой скорости вала.
Блог о технологии соединений от R+W
Не требующие обслуживания и жесткие на кручение соединительные элементы для плавного стабильного хода
В течение многих десятилетий инженеры обращались к гибкой дисковой муфте для приложений, требующих максимальной надежности и времени безотказной работы, минимизации износа смежного оборудования и устранения необходимости смазки или обслуживания самой муфты.До изобретения дисковой муфты эластичные муфты почти всегда включали либо зубья шестерни, которые требовали периодической смазки, либо резиновые и пластиковые детали, которые со временем изнашивались и требовали замены. Кроме того, по мере того, как во второй половине двадцатого века промышленные процессы становились все более изощренными, потребность в улучшении баланса муфты стала критической как средство снижения вибрации вала для защиты подшипников и уплотнений подсоединенного оборудования — в чем помогла эластичная дисковая муфта. отличная сделка.Со временем использование дисковых муфт расширилось до широкого спектра применений, и многочисленные конструкции машин использовали их уникальные характеристики. В этой вводной статье представлен краткий обзор базовой конструкции промышленных дисковых муфт и того, что обеспечивает им производительность и долговечность, которые ценят многие инженеры.
Кроме того, по мере того, как во второй половине двадцатого века промышленные процессы становились все более изощренными, потребность в улучшении баланса муфты стала критической как средство снижения вибрации вала для защиты подшипников и уплотнений подсоединенного оборудования — в чем помогла эластичная дисковая муфта. отличная сделка.Со временем использование дисковых муфт расширилось до широкого спектра применений, и многочисленные конструкции машин использовали их уникальные характеристики. В этой вводной статье представлен краткий обзор базовой конструкции промышленных дисковых муфт и того, что обеспечивает им производительность и долговечность, которые ценят многие инженеры.
Пакеты гибких дисков состоят из тонких прокладок из листового металла, обычно штампованных или вырезанных лазером в форме кольца с рядом монтажных отверстий; обычно 6-8, но также используется больше или меньше, в зависимости от размера муфты, при этом в самых маленьких конструкциях обычно используется 4, а в самых больших дисковых муфтах используется любое количество отверстий.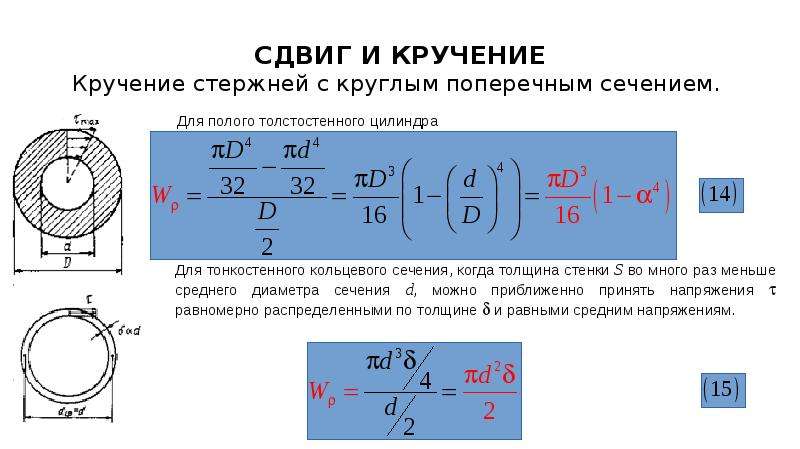 Прокладки укладываются вместе и удерживаются на месте втулками, а полученный пакет дисков прикручивается болтами к соединительной системе. Компенсация смещения зависит от гибкости самих прокладок, и, как правило, чем больше стопка, тем выше общая жесткость пакета дисков с точки зрения как кручения, так и изгиба. Центрирование пакета дисков в муфте может быть выполнено различными способами, одним из распространенных методов является прецизионно обработанные карманы в соседних монтажных фланцах, которые концентрически удерживают пакеты дисков на месте с помощью их втулок.Пакеты дисков крепятся к соответствующим ступицам с помощью болтовых соединений, чередующихся между ведущей ступицей и ведомой ступицей. Части пакета дисков, перекрывающие расстояния между соответствующими болтовыми соединениями, обеспечивают гибкость и позволяют одному соединению пакета дисков поворачиваться и компенсировать угловой изгиб при передаче вращения и крутящего момента. Один дисковый пакет обычно является жестким при сдвиге, а это означает, что он не может компенсировать несоосность между двумя независимо поддерживаемыми валами, если только он не используется вместе со вторым дисковым пакетом для выполнения противоположного углового изгиба и завершения параллельного смещения.
Прокладки укладываются вместе и удерживаются на месте втулками, а полученный пакет дисков прикручивается болтами к соединительной системе. Компенсация смещения зависит от гибкости самих прокладок, и, как правило, чем больше стопка, тем выше общая жесткость пакета дисков с точки зрения как кручения, так и изгиба. Центрирование пакета дисков в муфте может быть выполнено различными способами, одним из распространенных методов является прецизионно обработанные карманы в соседних монтажных фланцах, которые концентрически удерживают пакеты дисков на месте с помощью их втулок.Пакеты дисков крепятся к соответствующим ступицам с помощью болтовых соединений, чередующихся между ведущей ступицей и ведомой ступицей. Части пакета дисков, перекрывающие расстояния между соответствующими болтовыми соединениями, обеспечивают гибкость и позволяют одному соединению пакета дисков поворачиваться и компенсировать угловой изгиб при передаче вращения и крутящего момента. Один дисковый пакет обычно является жестким при сдвиге, а это означает, что он не может компенсировать несоосность между двумя независимо поддерживаемыми валами, если только он не используется вместе со вторым дисковым пакетом для выполнения противоположного углового изгиба и завершения параллельного смещения.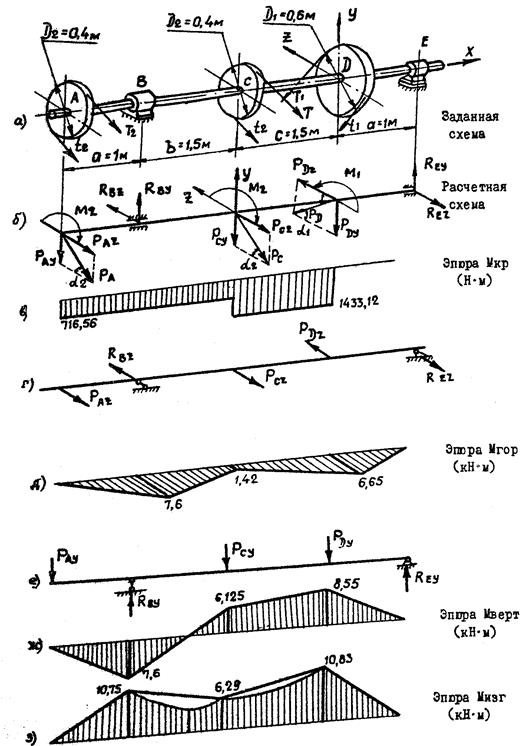 Исключением из этого правила является использование одного дискового блока в сочетании с самоустанавливающимся шарикоподшипником, который заменяет второй дисковый пакет, обеспечивая вторую угловую свободу перемещения. Чем больше расстояние между пакетами дисков, тем больше параллельное смещение, которое можно компенсировать при заданном угле изгиба.
Исключением из этого правила является использование одного дискового блока в сочетании с самоустанавливающимся шарикоподшипником, который заменяет второй дисковый пакет, обеспечивая вторую угловую свободу перемещения. Чем больше расстояние между пакетами дисков, тем больше параллельное смещение, которое можно компенсировать при заданном угле изгиба.
Жесткость при сдвиге одинарного пакета дисков является одним из ключевых факторов плавного хода на высоких скоростях. Большинство гибких муфт имеют некоторый уровень мягкости в радиальном направлении, а это означает, что центробежные силы будут легче деформировать гибкий элемент при вращении на более высоких скоростях, что приведет к нестабильности и сделает вибрацию более вероятной.Напротив, дисковые муфты обладают уникальной способностью среди систем гибких муфт жестко удерживать все свои компоненты в пределах их осей вращения, включая любые прокладки, трубы приводного вала или другие компоненты, которые могут быть установлены последовательно между двумя гибкими соединениями. Это делает их отличным выбором для высокоскоростной балансировки. Еще одним преимуществом радиальной жесткости однодискового пакета является его способность поддерживать промежуточные устройства. Чаще всего этим промежуточным устройством является измеритель крутящего момента, который широко используется на испытательных стендах и в других приложениях, требующих контроля состояния.Это позволяет измерителю крутящего момента стать неотъемлемой частью системы муфты, удерживаемой при концентрическом вращении за счет радиальной жесткости однодисковой пакетной муфты, установленной на каждой из ее ведущей и ведомой поверхностей.
Это делает их отличным выбором для высокоскоростной балансировки. Еще одним преимуществом радиальной жесткости однодискового пакета является его способность поддерживать промежуточные устройства. Чаще всего этим промежуточным устройством является измеритель крутящего момента, который широко используется на испытательных стендах и в других приложениях, требующих контроля состояния.Это позволяет измерителю крутящего момента стать неотъемлемой частью системы муфты, удерживаемой при концентрическом вращении за счет радиальной жесткости однодисковой пакетной муфты, установленной на каждой из ее ведущей и ведомой поверхностей.
Со скоростью вращения также связано количество циклов изгиба, которые пакет дисков может выдержать до выхода из строя. Поскольку они не имеют изнашиваемых или движущихся частей, в течение одного оборота не происходит истирания, а компенсация смещения достигается исключительно за счет изгиба листового металла.Обычно считается, что стальные компоненты обладают долговременной усталостной прочностью, если они способны выдерживать 10 7 циклов нагрузки при заданной амплитуде напряжения. Поскольку промышленные дисковые муфты, как правило, рассчитаны на несоосность и условия крутящего момента, которые могут быть выдержаны в течение как минимум этого количества циклов, они считаются устойчивыми к усталости в течение срока службы, приближающегося к бесконечному числу циклов вращения, что является ключом к их репутации надежности, не требующей обслуживания. .
Поскольку промышленные дисковые муфты, как правило, рассчитаны на несоосность и условия крутящего момента, которые могут быть выдержаны в течение как минимум этого количества циклов, они считаются устойчивыми к усталости в течение срока службы, приближающегося к бесконечному числу циклов вращения, что является ключом к их репутации надежности, не требующей обслуживания. .
Из-за разнообразия областей применения гибких дисковых муфт существует большое разнообразие конфигураций, и большинство производителей предлагают индивидуальные настройки и специальные функции.Ниже приводится краткий обзор распространенных стандартных конструкций, особенности которых часто можно легко превратить в комбинации различных стилей ступиц и удлиненных прокладок, отрезанных по длине, что ни в коем случае не делает его исчерпывающим.
Муфта с распорной втулкой, показанная последним элементом в обзоре, доступна со специальным набором функций, обеспечивающих соответствие муфты стандарту API-610, разработанному Американским институтом нефти для обеспечения надежности конструкции центробежных насосов и муфты.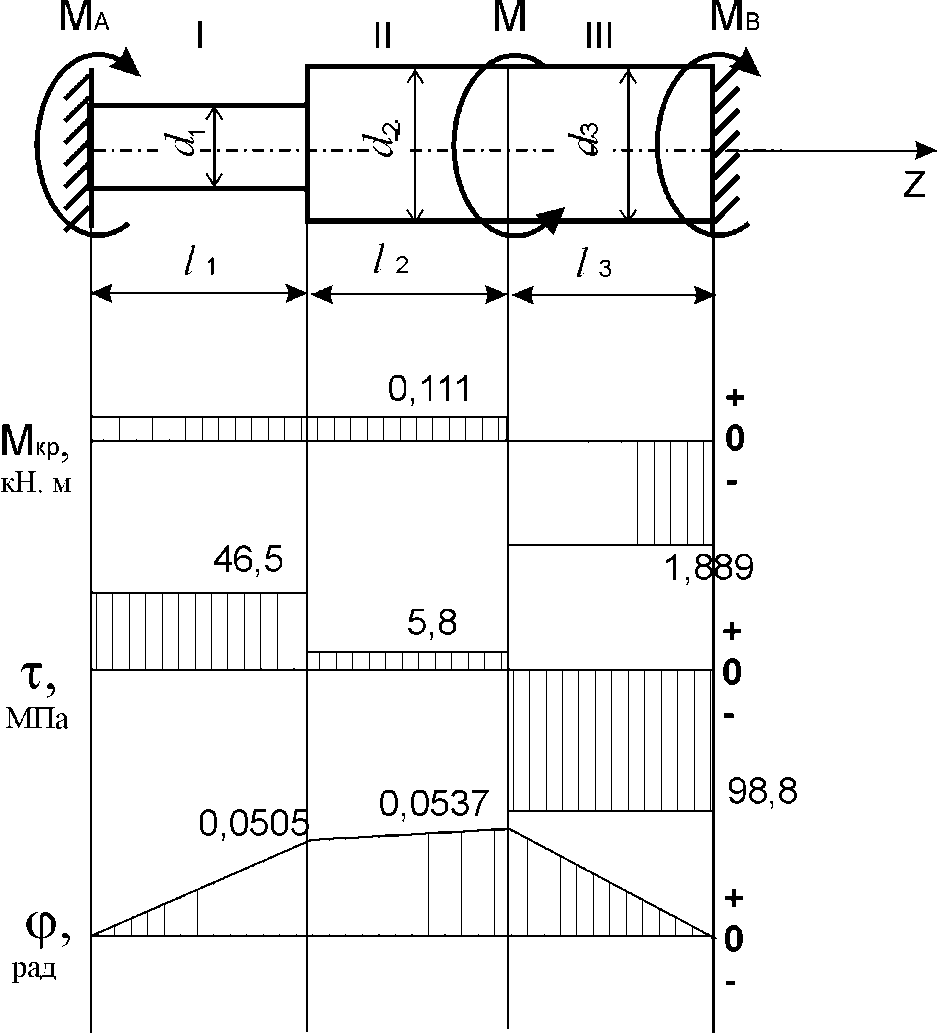 Вместо того, чтобы прикручивать пакет дисков непосредственно к ступице вала, он прикручивается к промежуточному защитному кольцу, которое, в свою очередь, прикручивается к ступице вала. Это создает прокладочный картридж, который позволяет легко устанавливать и снимать без необходимости перемещать ступицы вала. Эта функция отключения полезна для получения доступа к насосам и редукторам для обслуживания с минимальными усилиями. Промежуточные защитные кольца также проходят через центральные отверстия пакетов дисков, обеспечивая предохранитель, предотвращающий выбрасывание промежуточной трубки в случае неожиданного отказа пакета дисков.Использование этой функции выпадающей прокладки стало популярным в приложениях, выходящих за рамки тех, которые используются в нефтегазовой промышленности, например, во вращающихся испытательных стендах и других устройствах, где предполагается необходимость нечастой разборки муфты.
Вместо того, чтобы прикручивать пакет дисков непосредственно к ступице вала, он прикручивается к промежуточному защитному кольцу, которое, в свою очередь, прикручивается к ступице вала. Это создает прокладочный картридж, который позволяет легко устанавливать и снимать без необходимости перемещать ступицы вала. Эта функция отключения полезна для получения доступа к насосам и редукторам для обслуживания с минимальными усилиями. Промежуточные защитные кольца также проходят через центральные отверстия пакетов дисков, обеспечивая предохранитель, предотвращающий выбрасывание промежуточной трубки в случае неожиданного отказа пакета дисков.Использование этой функции выпадающей прокладки стало популярным в приложениях, выходящих за рамки тех, которые используются в нефтегазовой промышленности, например, во вращающихся испытательных стендах и других устройствах, где предполагается необходимость нечастой разборки муфты.
Еще одна полезная модификация — это конфигурация с трубкой приводного вала из углеродного волокна. Это позволяет промышленным системам дисковых муфт преодолевать большие расстояния на более высоких скоростях. Сочетание легкого веса и высокой жесткости трубок из углеродного волокна обеспечивает плавную работу в удлиненных валах с минимальным дисбалансом или биением, вызванным трубкой.На изображении ниже показан пример промышленной дисковой муфты, оснащенной трубкой из углеродного волокна, а также специальной водопроводной системой, которая позволяет жидкости проходить через центр муфты для обеспечения смазки для станков
Это позволяет промышленным системам дисковых муфт преодолевать большие расстояния на более высоких скоростях. Сочетание легкого веса и высокой жесткости трубок из углеродного волокна обеспечивает плавную работу в удлиненных валах с минимальным дисбалансом или биением, вызванным трубкой.На изображении ниже показан пример промышленной дисковой муфты, оснащенной трубкой из углеродного волокна, а также специальной водопроводной системой, которая позволяет жидкости проходить через центр муфты для обеспечения смазки для станков
Возможно, самой интересной дополнительной функцией дисковых муфт является недавно разработанная система дистанционных датчиков, которую можно интегрировать в распорки. Эти новые сенсорные системы обеспечивают беспроводную передачу данных о крутящем моменте, скорости, вибрации и осевой нагрузке в режиме реального времени через Bluetooth-соединение либо на смартфон или планшет со специальным приложением, либо на беспроводной шлюз для интеграции передачи данных о производительности в существующие системы управления. Этот технологический прогресс важен для инженеров и операторов, которые ранее испытывали некоторые трудности с мониторингом данных в критических точках трансмиссии, поскольку в прошлом им приходилось либо оценивать нагрузки, либо проводить трудоемкие и дорогостоящие тесты для периодического мониторинга нагрузок.
Этот технологический прогресс важен для инженеров и операторов, которые ранее испытывали некоторые трудности с мониторингом данных в критических точках трансмиссии, поскольку в прошлом им приходилось либо оценивать нагрузки, либо проводить трудоемкие и дорогостоящие тесты для периодического мониторинга нагрузок.
В зависимости от конфигурации промышленные дисковые муфты по-прежнему являются лучшим вариантом для тяжелых трансмиссий в приложениях, требующих высочайшей надежности и времени безотказной работы, охвата больших расстояний между валами и сочетания высокой мощности и высокой скорости.Несмотря на то, что для стандартных приложений доступно множество готовых конфигураций, существует также множество вариантов индивидуальной настройки. Консультации с инженерами по применению производителя всегда являются лучшей отправной точкой, и R+W готова помочь с оценкой проекта и требований к производительности, а также помочь определить лучшее решение для любого приложения. Свяжитесь с нами по адресу [email protected] для получения подробной информации.
Свяжитесь с нами по адресу [email protected] для получения подробной информации.
R+W занимается разработкой и производством высокоэффективных гибких муфт и ограничителей крутящего момента с 1990 года и с каждым годом продолжает расширять ассортимент своей продукции.Обладая репутацией производительности, качества и индивидуальной настройки, многие считают ее ведущим производителем прецизионных муфт в мире.
Вал с податливостью к скручиванию и изгибу
Описание
Блок гибкого вала представляет собой карданный вал с податливость к скручиванию и изгибу. Вал состоит из гибкого материала, который скручивается в ответ на приложенный крутящий момент и изгибается в ответ на дисбаланс статической массы.То крутящее действие задерживает передачу мощности между концами вала, изменяя динамическую реакция системы привода.
Для представления гибкого на кручение вала в блоке используется метод сосредоточенных масс. Эта модель
делит вал на разные элементы, которые соединяются между собой параллельной пружиной
демпферные системы. Элементы обеспечивают инерцию вала, а системы пружинных демпферов
обеспечить податливость вала.
Элементы обеспечивают инерцию вала, а системы пружинных демпферов
обеспечить податливость вала.
Блок предоставляет четыре метода параметризации, которые позволяют моделировать соответствие в либо однородный, либо аксиально-неоднородный вал.Осенеоднородный вал — это тот, для которого любой из этих атрибутов варьируется по длине вала:
крутильной жесткости
крутильных инерция
изгибной жесткости
Плотность
Модуль сдвига
модуль Юнга
Наружный диаметр диаметр
Внутренний
Дополнительный параметр позволяет моделировать потери мощности в подшипниках из-за вязких трение на концах вала.Для получения дополнительной информации см. Модель кручения.
Примечание
Вязкое трение на концах вала отличается от внутреннего материала
демпфирование, которое соответствует потерям, возникающим в материале вала
сам.
Для представления гибкого на изгиб вала в блоке используется либо метод сосредоточенных масс, либо метод собственных мод. Хотя метод сосредоточенных масс проще в настройке, собственные моды метод имеет тенденцию к более быстрому моделированию.
Наконечник
Если скорость моделирования имеет высокий приоритет, сначала выполните моделирование с использованием сосредоточенной массы методом, корректируя параметры по мере необходимости, пока результаты не будут соответствовать вашим математическим моделей или экспериментальных данных.Затем симулируйте с помощью метода собственных мод. Снова, корректировать параметры по мере необходимости до тех пор, пока не будут получены результаты математических моделей или экспериментальные данные. Пример, в котором используются оба метода, см. в разделе Вал с торсионной и поперечной гибкостью.
Для метода сосредоточенных масс количество изгибаемых элементов вала такое же, как и количество
элементов торсионного вала. Модель делит вал на ряд таких элементов.
Элементы обеспечивают инерцию вала, а матрицы жесткости обеспечивают валу
согласие.Метод собственных мод вычисляет эффективные системы масса-пружина-демпфер, которые
представляют собой формы изгиба вала. Вы можете указать количество режимов для включения
и точность форм мод. Как метод сосредоточенной массы, так и метод собственных мод позволяют
вам модель:
Модель делит вал на ряд таких элементов.
Элементы обеспечивают инерцию вала, а матрицы жесткости обеспечивают валу
согласие.Метод собственных мод вычисляет эффективные системы масса-пружина-демпфер, которые
представляют собой формы изгиба вала. Вы можете указать количество режимов для включения
и точность форм мод. Как метод сосредоточенной массы, так и метод собственных мод позволяют
вам модель:
Экгитационные статические дисбалансировки
Концентрически прикрепленные жесткие массы
до четырех мест поддержки вдоль вала
линейное демпфирование пропорционально валу инерции
линейное демпфирование пропорционально жесткости вала
Примечание
Метод собственных колебаний предполагает, что демпфирование опоры меньше, чем поддерживают жесткость.
Статические дисбалансы, вызывающие изгиб, возникают, когда центр масс вала или
прикрепленная жесткая масса не совмещена с главной осью вала. Вы можете варьировать
положения, величины и угловые смещения статических дисбалансов на валу.
Вы можете варьировать
положения, величины и угловые смещения статических дисбалансов на валу.
Концентрически прикрепленные твердые массы можно представить в виде дисков или идеализированных точечных масс. А концентрический диск добавляет диаметральный и полярный моменты инерции к валу и массу к степень поступательной свободы узлов вала.Модель предполагает, что диск тонкий, поэтому вал все еще может изгибаться в любую сторону от осевого расположения с диском. Полярный момент инерции связывает две плоскости изгиба. Концентрическая точечная масса представляет собой идеализированную версию концентрического диска. Концентрическая точечная масса добавляет массу к поступательных степеней свободы узлов вала, но не имеет вращательных моментов инерции. Вы можете изменять расположение и инерцию концентрических дисков или точечных масс. которые прикреплены к валу.
Опоры можно моделировать как идеальные или с помощью матриц жесткости и демпфирования. За каждую опору можно варьировать:
Расположение — любая точка по длине вала.

Тип — Идеальный зажим, идеальный штифт, свободный, постоянная жесткость подшипника и демпфирование или жесткость и демпфирование, зависящие от скорости.
Количество — два, три или четыре.
Для обоих методов изгиба можно указать податливость вала к изгибу, используя либо жесткость на изгиб и линейную плотность массы или модуль Юнга и диаметр вала.
Вы можете параметризовать торсионную модель, используя жесткость k и инерция J или размеры и свойства материала вал.
Модель кручения
Для модели кручения блок гибкого вала приближается распределенные, непрерывные свойства вала с использованием метода сосредоточенных масс. То модель содержит конечное число, N , сосредоточенных инерционно-демпфированных пружинные элементы последовательно плюс конечная инерция.Результатом является ряд N+1 инерций, соединенных N вращательными пружинами и N Демпфер вращения.
Блок моделирует вал как эквивалентную физическую сеть N гибкие элементы. Каждый гибкий элемент, FE i представляет собой короткий участок
карданный вал и содержит:
Каждый гибкий элемент, FE i представляет собой короткий участок
карданный вал и содержит:
Одна пружина, к FE_i , для соответствие скручиванию. Всего в сети N пружины.
Один демпфер, b FE_i , для материальное демпфирование. Всего в сети N амортизаторы.
Две инерции, I FE_iC и I FE_iR , для вращения сопротивление. Инерции соседних гибких элементов равны объединены вместе, так что сеть имеет в общей сложности N+1 инерций.
Для аксиально-однородного вала длина гибкого элемента, податливость, демпфирование и распределенные инерции в физической сети равны, так что:
Для аксиально-неоднородного вала величина податливости, демпфирования и R -узел и C -узел инерция может отличаться
для отдельных гибких элементов модели физической сети.
Баланс между точностью модели и скоростью моделирования зависит от N , количество гибких элементов, которые блок использует для представляют собой вал. Для получения информации о балансировке скорости симуляции и модели верность, см. раздел «Улучшить скорость или точность симуляции».
Блок позволяет указать минимальное количество гибких элементов, Н мин , как значение для Параметр минимального количества гибких элементов.Тем не мение, количество гибких элементов, которые фактически использует блок, зависит от сложность моделируемого вала. Если блок требует большей гибкости элементов, чем вы укажете, чтобы решить модель, содержащую осевую неоднородность, промежуточные опоры, концентрические диски или массы или статические дисбалансы, тогда N≥Nmin.
Например, предположим, что для сложного вала на диаграмме вы указываете осевое
места для опор, статический дисбаланс, секция большего диаметра и
концентрический диск. Вы устанавливаете параметр для Н мин до
Вы устанавливаете параметр для Н мин до 7 .
Если включено изгибание модели, учитывается расположение гибких элементов модели кручения. для расположения статических дисбалансов и концентрических жестких масс, так что кручение гибких элементов совмещается с изгибом гибких элементов. В течение симуляции модель кручения не зависит от каких-либо статических дисбалансов или концентрические твердые массы.
Алгоритм блока определяет количество гибких элементов и длину отдельные элементы, необходимые для решения симуляции:
Блок размещает по одному узлу на базовом и ведомом концах вал.Эти узлы считаются фиксированными в осевое расположение, потому что они представляют физические объекты вдоль ось вала. На схеме фиксированные узлы показаны красным цветом. Блок равномерно распределяет остальные пять ( N мин -2) внутренний узлы по длине вала. Затем он размещает гибкий элемент между каждой последовательной парой узлов.

Для торцевого, однородного в осевом направлении вала без статического дисбалансы или прикрепленные концентрические диски, в зависимости от других параметры и значения, которые вы указываете, блок может быть в состоянии решить симуляцию, используя только Н мин. гибкий элементы эквивалентной длины:
Однако в большинстве случаев блок может решить симуляцию, только если он добавляет больше гибких элементов.
Чтобы добавить больше гибких элементов, блок размещает фиксированные внутренние узлы в следующих местах:
Каждое место опоры вала. Блок позволяет укажите количество и расположение опор вала. За вала на схеме есть опоры на з 1 и з 6 .
Каждый статический дисбаланс. Для вала на схеме имеется статическая неуравновешенность z 2 .
Каждая жесткая масса. Твердые массы концентрически присоединенные диски или точечные массы.
 Для вала в
диаграмме имеется твердая масса, представленная в виде диска,
по адресу z 5 .
Для вала в
диаграмме имеется твердая масса, представленная в виде диска,
по адресу z 5 .Граница каждого сегмента параметризации. Границы параметризации места вдоль аксиально-неоднородного вала, где два соседние участки вала различаются по жесткости, инерция, или геометрия.Блок позволяет определить расположение границ сегмента параметризации. Для вала на схеме имеются границы сегментов на з 3 и z 4 .
Обратите внимание, что блок не добавил узел в z 4 потому что узел уже был добавлен на предыдущем шаге алгоритм. Однако узел теперь зафиксирован, потому что он представляет собой физический объект вдоль вала длина.
Блок корректирует расположение нефиксированных узлов между фиксированными узлов так, чтобы они были равномерно распределены.
Наконец, блок размещает гибкие элементы между каждым узлом. Длина каждого гибкий элемент соответствует межцентровым расстояниям между соседними узлами.
 Блок распределяет инерцию
среди гибких элементов в зависимости от длины отдельных
элемента и соответствующей геометрии вала.В конечном счете, это
сложный вал представлен 12 гибкими элементами, при этом l1=z1, l2=l3=(z2−z1)2, l4=l5=(z3−z2)2, l6=l7=(z4−z3)2, l8=l9 =(z5−z4)2, l10=l11=(z6−z5)2 и l12=z7−z6.
Блок распределяет инерцию
среди гибких элементов в зависимости от длины отдельных
элемента и соответствующей геометрии вала.В конечном счете, это
сложный вал представлен 12 гибкими элементами, при этом l1=z1, l2=l3=(z2−z1)2, l4=l5=(z3−z2)2, l6=l7=(z4−z3)2, l8=l9 =(z5−z4)2, l10=l11=(z6−z5)2 и l12=z7−z6.Если Н мин достаточно большой чтобы получить количество незафиксированных узлов, превышающее число фиксированных узлов, блок распределяет более одного незафиксированного узла между каждым набором соседних фиксированных узлов.
Вы можете параметризовать модель кручения, используя любую жесткость, k , и полярный момент инерции, Дж , или размеры и свойства материала вала.
Жесткость и инерция каждого элемента рассчитываются исходя из размеров вала и свойства материала как:
где:
J P — полярный момент инерции вала в месте расположения гибкого элемента.

D — наружный диаметр вала в гибкое расположение элементов.
d внутренний диаметр вала в гибкое расположение элементов.Для сплошного вала d=0. Для кольцевого вала d>0.
l — длина гибкого элемента.
м — масса вала на гибком расположение элемента.
J – момент инерции вала при гибкое расположение элементов.
ρ — плотность материала вала.
G — модуль упругости сдвига материал вала.
k – вращательная жесткость гибкого элемент.
Для любой параметризации кручения демпфирование внутреннего материала определяется
коэффициент демпфирования, c , для модели с одним гибким элементом с
эквивалентная жесткость на кручение и инерция. Тогда коэффициент демпфирования равен 2ckωN, где незатухающая собственная частота равна ωN=2kJ. Демпфирующий момент, приложенный к отдельному гибкому
элемент модели сосредоточенной массы эквивалентен произведению демпфирования
коэффициент и относительная скорость вращения этого гибкого
элемент.
Демпфирующий момент, приложенный к отдельному гибкому
элемент модели сосредоточенной массы эквивалентен произведению демпфирования
коэффициент и относительная скорость вращения этого гибкого
элемент.
Модели для изгиба
На рисунке «Геометрия вала, нагрузка на опору и движение» показано, как измерять:
Угол смещения статического дисбаланса, который представляет собой угол статического дисбаланс относительно оси вала относительно x оси
Расстояния между опорой, жесткой массой и статическим дисбалансом, относительно базового конца вала, B
Параметризация длин сегментов
На рисунке вал имеет три неподвижные опоры:
B 1 — Основание опора
I 1 — Промежуточная опора
F 1 — Конец толкателя поддержка
Вал имеет поступательную скорость V , вращательную
скорость W , и приложенные силы F , и моменты M , на опорах. Изогнутые стрелки и условные знаки
следуйте правилу правой руки. Знаки физических сигналов, которые выдает блок
соответствуют стрелкам, которые представляют силы, моменты и скорости
вал воздействует на опоры.
Изогнутые стрелки и условные знаки
следуйте правилу правой руки. Знаки физических сигналов, которые выдает блок
соответствуют стрелкам, которые представляют силы, моменты и скорости
вал воздействует на опоры.
Векторные сигналы:
Сила, Fr=[FxB1,FyB1,FxI1,FyI1,FxF1,FyF1]
Момент, M=[MxB1,MyB1,MxI1,MyI1,MxF1,MyF1]
902al = скорость перемещения [VxB1,VyB1,VxI1,VyI1,VxF1,VyF1]Скорость вращения, M=[MxB1,MyB1,MxI1,MyI1,MxF1,MyF1]
Если вал имеет две опоры, каждый векторный сигнал имеет длина четыре.Сила, например, тогда Fr=[FxB1,FyB1,FxF1,FyF1].
Если вал имеет четыре опоры, каждый векторный сигнал имеет длину восемь. Сила, для Например, тогда Fr=[FxB1,FyB1,FxI1,FyI1,FxI2,FyI2,FxF1,FyF1].
Геометрия вала, нагрузка на опору и Движение
Модель изгиба Метод сосредоточенных масс Как и модель кручения, метод сосредоточенных масс для модели изгиба дискретизирует
распределенные, непрерывные свойства вала в конечное число, N , из гибких элементов. N гибкие элементы соответствуют N+1 сосредоточенным инерциям, последовательно соединенным демпфированием и пружиной
элементы. Однако для модели изгиба каждая масса имеет четыре степени свободы:
перевод и вращение как в x , так и в y направления, перпендикулярные оси вала.
N гибкие элементы соответствуют N+1 сосредоточенным инерциям, последовательно соединенным демпфированием и пружиной
элементы. Однако для модели изгиба каждая масса имеет четыре степени свободы:
перевод и вращение как в x , так и в y направления, перпендикулярные оси вала.
Уравнение движения сосредоточенной массы [1] равно
где:
M — матрица 4(N+1)×4(N+1), представляющая массу вал.
B — матрица 4(N+1)×4(N+1) для внутреннего демпфирования и поддержки демпфирование.
G Диск — матрица 4(N+1)×4(N+1), которая учитывает дисковые гироскопы
Ω — скорость кручения вала во время моделирования.
K — матрица 4(N+1)×4(N+1) для жесткости пружины.
x→ — вектор 4(N+1)×1, представляющий степени свободы для все узлы.
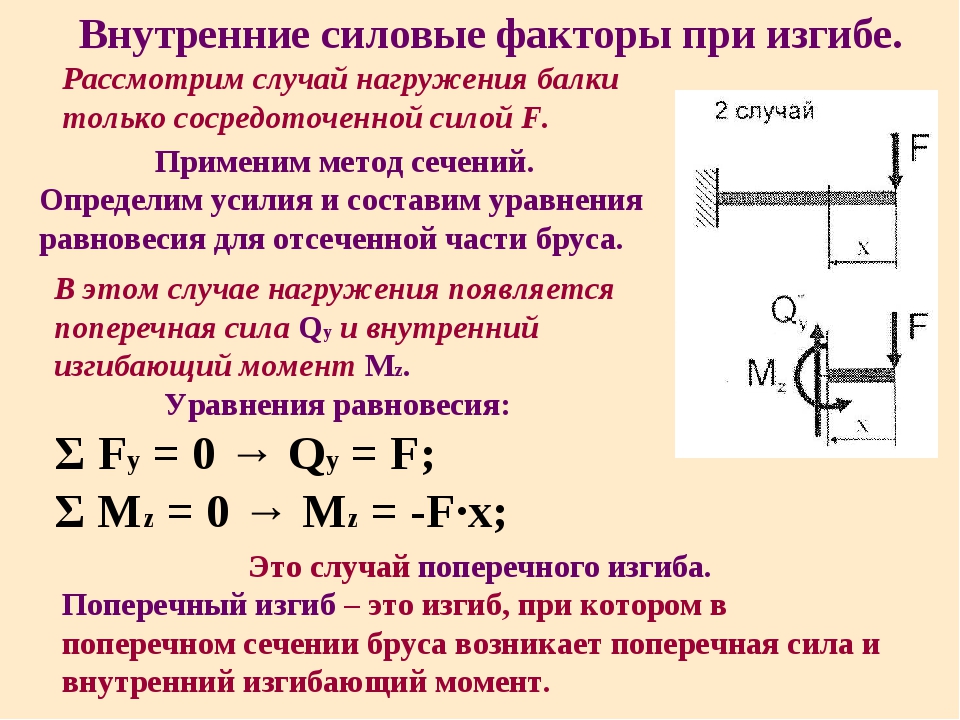
f→ — вектор 4(N+1)×1, представляющий внешние силы, вызванные применение статической неуравновешенности масс.
Уравнение для матрицы масс [4]:
где:
Mi/(i+1) — массовая матрица индивидуального гибкого элемент. Для каждого гибкого элемента половина массы и момента инерция передается узлам на обоих концах гибкого элемент. Матрица Mi/(i+1) имеет ненулевые элементы в (4i−3):(4i+4) строках и (4i−3):(4i+4) столбцах:
где:
l – длина гибкого элемента вдоль вал между внутренними узлами.Чтобы определить длина каждого гибкого элемента, блок использует алгоритм, который описан в алгоритме размещения узлов. Каждый гибкий элемент содержит две инерции. Каждый инерция имеет две поступательные степени свободы, две вращательная степень свободы и одна жесткость матрица.
Каждый гибкий элемент эквивалентной физической модели для изгиба в XZ — плоскость (перевод балки в X — направление и вращение вокруг оси Y ) и в физической модели для гибки в плоскости YZ (балка перемещение в направлении Y и вращение вокруг ось X) затем содержит две массы, две инерции и матрица жесткости.
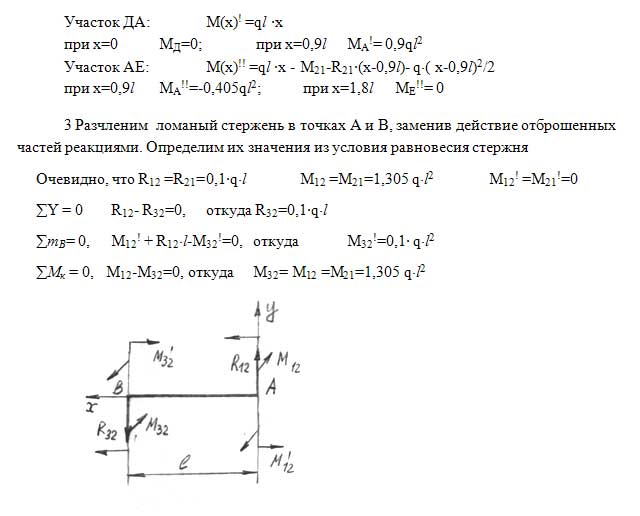
Чтобы определить расположение внутренних узлов и, следовательно, количество и длину гибкие элементы, блок использует те же алгоритм размещения узлов, используемый для кручения модель. Дополнительные сведения см. в разделе Алгоритм размещения узлов.
m – масса гибкого элемента. м зависит от внешнего, D и внутренний, d , диаметры, плотность, ρ , вала и длины гибкий элемент такой, что m= (π4)(D2−d2)ρl.
I д , момент инерции массы полуэлемента относительно оси перпендикулярно оси вала, зависит от массы, м , длина, l, и крутящий момент инерции, J , гибкого элемента, такого что Id=J4+m6(l2)2.
∑Mdisk, i – суммированные матрицы масс твердых масс. концентрически прикреплен к валу.
Массовые свойства каждой твердой массы, расположенной концентрически прикрепленные к валу, добавляются к ближайшему узлу i так, что
где I D,диск,i масса диаметральный момент инерции относительно оси, перпендикулярной валу для жесткого диска, прикрепленного к и -й узел.
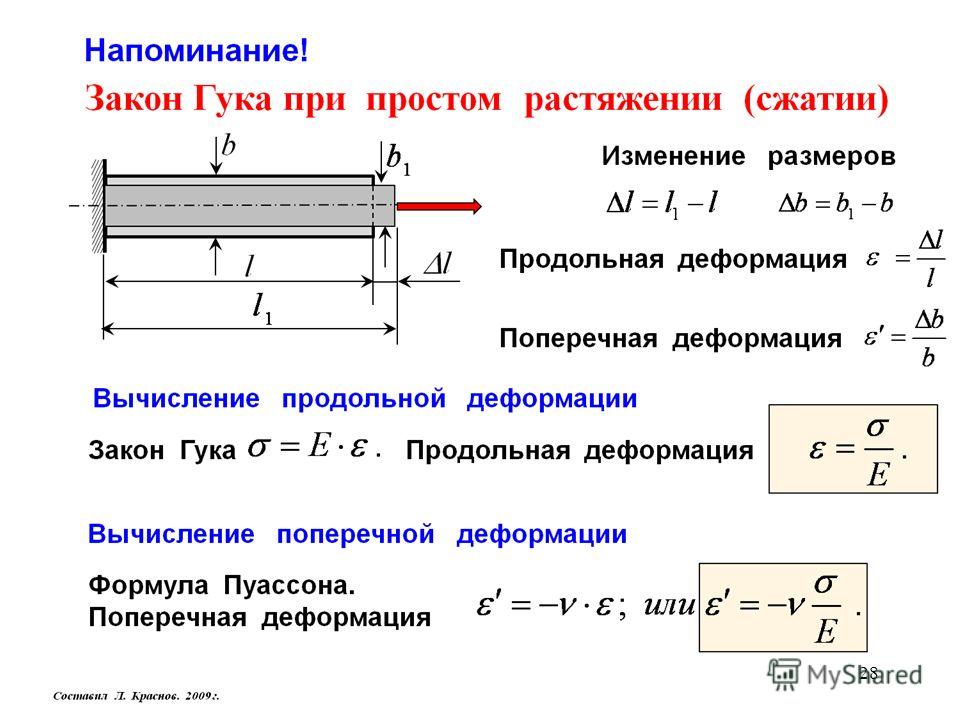 То
Модель предполагает, что диск тонкий, поэтому вал все еще может гнуться.
по обе стороны от осевого расположения с диском. Концентрическая точка
масса имеет ID,disk, i= 0,
То
Модель предполагает, что диск тонкий, поэтому вал все еще может гнуться.
по обе стороны от осевого расположения с диском. Концентрическая точка
масса имеет ID,disk, i= 0,
Уравнение для матрицы демпфирования:
где:
α – постоянная демпфирования, пропорциональная масса.
β – постоянная демпфирования, пропорциональная жесткость.
Б опора коэффициент демпфирования на каждой опоре.За поддержку на и -й узел, матрица демпфирования в глобальных координатах равна
где:
Gdisk, я учитываю гироскопические эффекты любого концентрически прикрепленные диски и определяется как
где I P,disk,i — масса полярный момент инерции относительно оси вала для закрепленного диска к узлу i th . То полярный момент инерции массы для концентрической точечной массы равен IP,disk, i= 0.
Уравнение для матрицы жесткости подшипника:
где:
Ki/i+1 — матрица жесткости для отдельного вала. гибкий элемент. Матрица жесткости i-го гибкого элемента вала между i th и (i+1)th узлов, имеет ненулевые элементы в (4i−3):(4i+4) строках и (4i−3):(4i+4) столбцах, так что
где:
K опора жесткость каждой опоры.За поддержку на и -й узел, матрица жесткости в глобальных координатах равна
где:
Матрица жесткости опоры, K опора ,
отлично от нуля, только если вы выбрали Матрица подшипника или Матрица подшипника, зависящая от скорости для опоры.
Если вы выберете тип крепления Clamped ,
к градусам применяются кинематические условия нулевого поворота и переноса
свободы, которые соответствуют опорному узлу ( B1 , I1 , I2 или F1 ).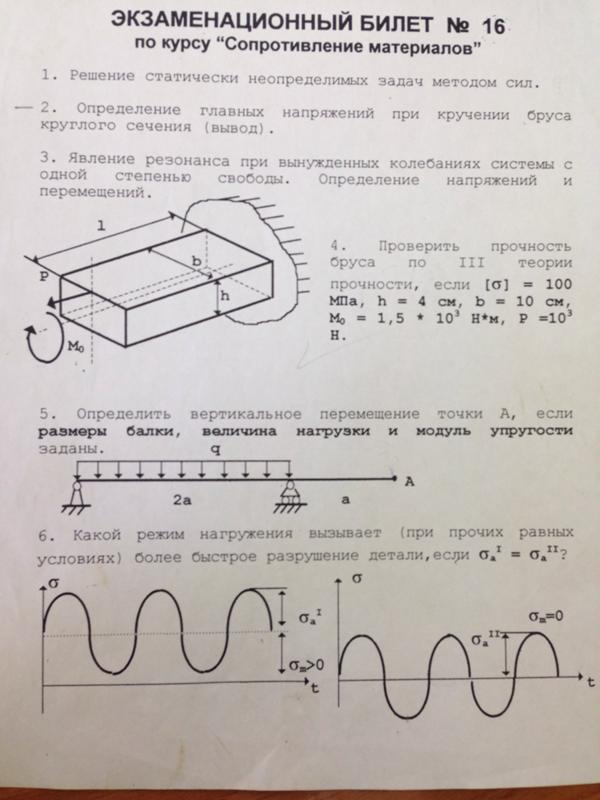 Если
вы выбираете тип крепления
Если
вы выбираете тип крепления Pinned , кинематический
к трансляционным степеням
свободы, которые соответствуют опорному узлу ( B1 , I1 , I2 или Ф1 ).
Таблица включает граничные условия, примененные к узлам сосредоточенных масс с поддерживает.
| Поддержка типа | Граничное состояние для сосредоточенного массового уравнения |
|---|---|
| xi = 0, yi = 0, θi = 0, φi = 0 | |
Шарнирный | xi= 0, yi= 0 |
Матрица подшипника | K опора есть нетривиальный. |
Подшипник, зависящий от скорости
матрица | K опора нетривиальна и зависит от скорость вращения вала. На каждом временном шаге К Опора рассчитывается как: где:
|
 ..,sS] параметр.
..,sS] параметр.Матрица, представляющая степени свободы для всех узлов, x→, рассчитывается таким образом, что степени свободы для i th и (i+1)th узлы
Внешние силы из-за дисбаланса каждой статической массы применяются к ближайшему узлу.То форсирование на i-м узле равно
где:
mε j j th статический дисбаланс, расположенный на и -й узел.
Ом i – скорость вращения вала при моделирование для i th узел.
φ вал, i торсион угол поворота сосредоточенной массы для я я узел.

Для метода собственных мод блок уменьшает динамику изгиба с 4 (N+1) степеней свободы, которые метод сосредоточенной массы модели изгиба обеспечивает, до М степени свободы, где М это количество режимов.
Блок вычисляет свойства режима изгиба вала во время компиляции модели, затем решает модальные системы массы-пружины-демпфера во время моделирования модели.
Уменьшение степеней свободы в динамике модели и разделение расчетов на задачи времени компиляции и времени выполнения улучшают производительность моделирования.Собственные моды Метод предполагает, что формы колебаний не зависят от затухания. Следовательно, метод лучше всего подходит для моделей с ограниченным дисковым гироскопом и поддержкой демпфирование.
Во время компиляции блок вычисляет приблизительные затухающие собственные моды, используя эти шаги:
Блок вычисляет матрицы, используя то же самое уравнение движения сосредоточенной массы, что и использование для метода сосредоточенной массы модели изгиба:
Для получения дополнительной информации см.
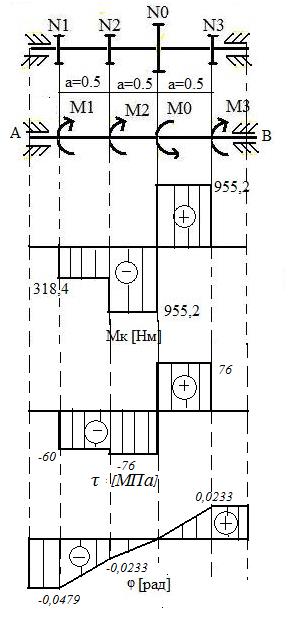 Метод сосредоточенных масс модели изгиба.
Метод сосредоточенных масс модели изгиба.При определении осевых местоположений узла для x→ блок использует один из двух вариантов алгоритма размещения узла, который он использует для модели кручения. и метод сосредоточенных масс модели изгиба. Вариант, что блок использование зависит от того, есть ли в Advanced Bending настройки, параметр Определение режима изгиба установлен на
Simscape определяетсяили наОпределяется пользователем.Если для параметра Определение режима изгиба установлено значение
Simscape определилвместо использования Минимальное количество гибких элементов Параметр для Н мин , как сосредоточенная масса методы делают, метод собственных мод вычисляет Н мин. какгде:
L – указанное значение в Вал настройки, для Длина вала параметр.

dz — указанное значение, в Расширенные настройки гибки , для Приращения длины вала для формы моды вычислений параметр.
Для расчета м незатухающих собственных мод и собственные частоты, блок использует функцию
eigs. То уравнение принимает вид :[H, λ] = eigs( sparse(K), sparse(M), mMax, 'smallestabs' ),
где:Н есть матрица собственных векторов размера 4(N+1)×M.Каждый столбец представляет собой собственная мода в координатах x→.
λ — собственные значения, которые квадрат собственных частот.
м Макс. заданное значение, в Advanced Изгиб настроек , для лимита количество режимов параметр.
Количество вычисленных собственных мод, m , меньше чем м Макс. если:
Имеются моды с собственными частотами, превышающими заданное значение, в Advanced Изгиб настроек, для Верхний предел собственной частоты параметр.
 Блок отбрасывает эти режимы.
Блок отбрасывает эти режимы.Собственные значения не сходятся. Чтобы получить больше информации, см.
eigs.
Если для параметра Определение режима изгиба установлено значение
Определяется пользователем, блок вычисляет матрица собственных векторов H от указанных значений в Advanced Bending настройки, для этих параметров:Режим X-направления Формы
Y-образных форм формы
Положение Положение вала
Для определения осевых местоположений узла для X →, блок использует элементы, указанные для в Положение вала параметр как первичный
узлы.Блок вычисляет модальные матрицы, M Модальный , К Модальный , Б Модальный , G Модальный и f Модальный , как:
Хотя блок вычисляет незатухающие собственные моды, H , на шаге 1 модальная матрица демпфирования, B Модальный и модальный гироскопическая матрица, G Modal , может модель легкое демпфирование.Блок нормализует матрицы так, что M Модальный единичная матрица.
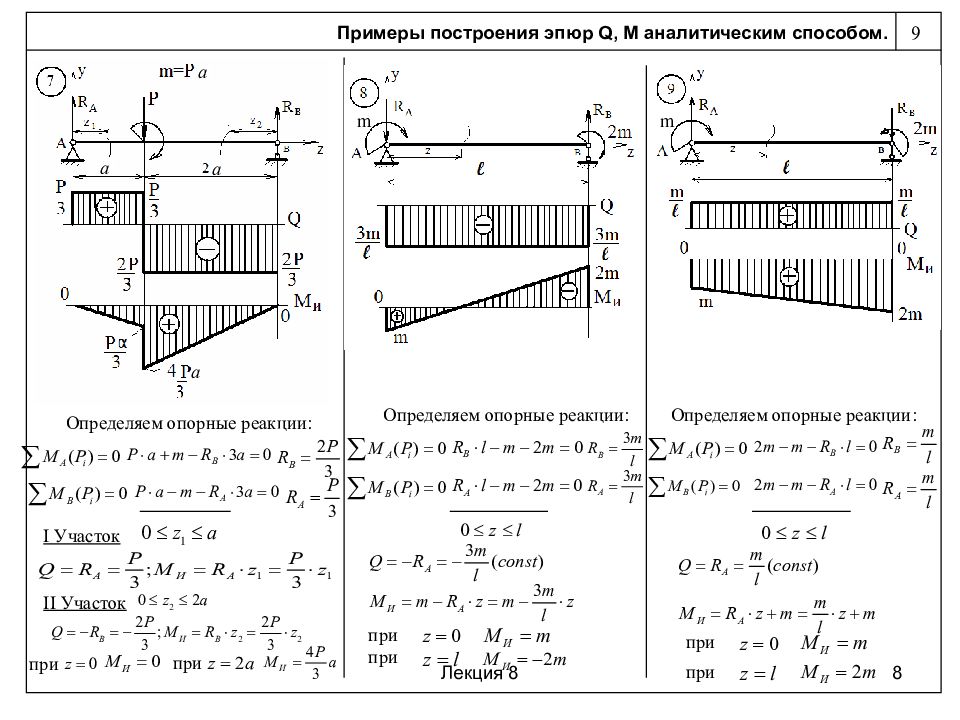
Чтобы вычислить модальное вращение, θ и φ, для каждого узла, блок использует
функция градиента .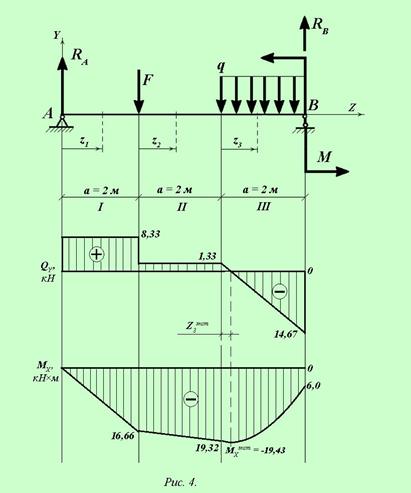 То
уравнения принимают вид:
То
уравнения принимают вид:
θ = -градиент (формы мод направления Y) φ = градиент (формы режима направления X)
Блок собирает формы режима направления X , Формы мод направления Y и модальные повороты, θ и φ в координатах x→ для каждого столбца H .
Во время моделирования блок моделирует уравнение собственного режима движение:
, где модальные степени свободы, η→, связаны со степенями свободы узлов как:
Метод собственных колебаний, зависящих от скорости
Жесткость и демпфирование опор изменяются, если в Опоры настройки, параметр типа крепления для любой из опор устанавливается равным Матрица подшипников, зависящая от скорости .То
модель собственных мод, зависящих от скорости, учитывает эти эффекты путем изменения модального
свойства, H , Б Модальный , Г Модальный , К Модальный и f Modal как скорость вала
изменения. M Модальный нормализуется к
тождественная матрица для всех скоростей вала, поэтому она не зависит от вала
скорость.
Если вал имеет зависимые от скорости подшипниковые опоры, то блок повторяет режим изгиба Шаги метода собственных форм для каждого элемента вектора скорости вала. Вал элементы вектора являются заданными значениями, в поддерживает настройки, для параметра Bearing speed [s1,…,sS] . Во время моделирования модальная жесткость, демпфирование и величина воздействия регулируется на основе справочных таблиц свойств в зависимости от скорости вала.
То есть блок моделирует собственное уравнение движения как:
где К Модальный , B Модальный и f Модальные имеют форму:
где:
Ом Ссылка – заданное значение в Поддерживает настройки для Скорость подшипника [с1,…,sS] параметр.
K Модальный, Ref есть таблица модальных жесткостей при каждом Ом № по каталогу .

B модальный,Ref таблица опорного демпфирования на каждый Ом Ref .
G модальный,Ref таблица дискового гироскопического демпфирования на каждом Ом № по каталогу .
f Модальный, Ref is таблица модального воздействия на каждый Ом № по каталогу .
Блок сопоставляет подобие формы моды при различных значениях Ω Ref и переупорядочивает режимы, если это необходимо, чтобы каждый модальная степень свободы, η→, имеет свойства, которые постепенно изменяются вместе с валом скорость.
Повышение скорости или точности моделирования
Баланс между точностью моделирования и производительностью зависит от N ,
количество гибких элементов, которые блок использует для представления вала.
Точность моделирования — это мера того, насколько результаты моделирования согласуются с
математические и эмпирические модели. Как правило, по мере увеличения N , поэтому
моделирует точность и точность симуляции. Однако вычислительные затраты на
моделирование также коррелирует с N , а стоимость вычислений
увеличивается, производительность снижается. Наоборот, по мере уменьшения N ,
скорость симуляции увеличивается, но точность симуляции снижается.
Как правило, по мере увеличения N , поэтому
моделирует точность и точность симуляции. Однако вычислительные затраты на
моделирование также коррелирует с N , а стоимость вычислений
увеличивается, производительность снижается. Наоборот, по мере уменьшения N ,
скорость симуляции увеличивается, но точность симуляции снижается.
Для повышения точности моделирования методом сосредоточенных масс при кручении или изгибе модель, увеличить минимальное количество гибких элементов, Н мин .Единственный гибкий элемент Модель кручения имеет собственную частоту кручения, близкую к первой собственная частота непрерывной модели с распределенными параметрами. Для большей точности вы можете выбрать 2, 4, 8 или более гибких элементов. Например, четыре нижних собственные частоты кручения представлены с точностью 0,1, 1,9, 1,6 и 5,3 процента, соответственно, по модели с 16 гибкими элементами.
Чтобы повысить точность моделирования для метода собственных колебаний до модели изгиба:
При моделировании со статической зависимостью собственной формы от скорости вращения, убедитесь, что параметр Номинальная скорость вала при изгибе mode параметр близок к скорости вала моделирования.
 Этот параметр может повлиять на результаты модели, если вы параметризуете жесткий диск.
прикрепленный к валу с большим моментом инерции масс относительно
ось вала или укажите любую матрицу подшипников, зависящую от скорости
поддерживает.
Этот параметр может повлиять на результаты модели, если вы параметризуете жесткий диск.
прикрепленный к валу с большим моментом инерции масс относительно
ось вала или укажите любую матрицу подшипников, зависящую от скорости
поддерживает.При моделировании с динамической зависимостью собственной моды от скорости вращения, убедитесь, что в настройках Supports заданные значения для Скорость подшипника [с1,…,сС] охватывают диапазон скоростей вала моделирования или насыщение жесткость опоры и демпфирование при скоростях вала за пределами диапазона приемлемое приближение.
В настройках Advanced Bending уменьшите значение шага длины вала для формы моды вычислений параметр. Уменьшение значения может увеличить точность модальных частот и форм.
Уменьшить демпфирование опоры и полярный момент инерции диска примерно оси вала. Расчеты Simscape™ форм и частот мод до моделирование не учитывает это демпфирование.

Проверьте чувствительность к Advanced Bending настройки, используя ваши параметры в модели гибкого вала в Пример вала с торсионной и поперечной гибкостью. Настройте параметры и воспользуйтесь ссылками, представленными в пример, чтобы изучить, как значения влияют на частоты собственных мод и формы. Соответственно отрегулируйте значения параметров в вашей модели.
Увеличьте значения верхней границы собственной частоты limit и Ограничение количества режимов параметры.Самая высокая модальная частота в моделировании должна быть значительно больше частоты вращения вала.
Допущения и ограничения
Модель непрерывного крутильного вала с распределенными параметрами аппроксимируется конечным числом N сосредоточенных массы.
Вращение вала и податливость при кручении вызывают изгиб вала, но изгиб не влияет на вращение вала и упругость при кручении.

Жесткие точечные грузы или диски, прикрепленные к валу, имеют небольшую длину параллельно оси вала.
Для модели изгиба собственных колебаний демпфирование не влияет на собственные частоты.
Изгиб вала не передается между гибкими Валовые блоки.
По сравнению с длиной вала внешний диаметр вала мал.
Относительно длины вала изгиб небольшой.
Статические неуравновешенные массы являются единственными внешними возбуждающими нагрузками, изгибающими вал.
Опоры вала стационарные.
Учитываются гироскопические эффекты жестких дисков; гироскопические эффекты самого вала пренебрегают.
Статическая неуравновешенность массы в методе собственных колебаний использует вращение скорость в средней точке вала.
Если вал моделирует только кручение и использует опции параметризации По жесткости и инерции или По сегменту жесткость и инерция , в блоке используются только две опоры, одна каждый на концах B и F .

Страница не найдена – newsteelconstruction.com
Архивы НБК
Архивы НБК Выбрать месяц Январь 2022 Декабрь 2021 Ноябрь 2021 Октябрь 2021 Сентябрь 2021 Август 2021 Июль 2021 Июнь 2021 Май 2021 Апрель 2021 Март 2021 Февраль 2021 Январь 2021 Декабрь 2020 Ноябрь 2020 Октябрь 2020 Сентябрь 2020 Август 2020 Июль 2 2 Апрель 2020 Июнь 2020 Май 2020 202020 г. декабрь 2019 Ноябрь 2019 Октябрь 2019 г. Сентябрь 2019 г. август 2019 Июль 2019 г. Июнь 2019 г. Май 2019 г. апрель 2019 г. Март 2019 г. Февраль 2019 г. Январь 2019 г. декабрь 2018 Ноябрь 2018 Октябрь 2019 г. Сентябрь 2018 г. август 2018 г. Июль 2018 г. Июнь 2018 г. Май 2018 г. апрель 2018 г. Декабрь 2017 Ноябрь 2017 Октябрь 2017 Сентябрь 2017 г. август 2017 Июль 2017 г. Июнь 2017 Май 2017 Апрель 2017 г. Март 2017 г. Февраль 2017 Январь 2017 г. декабрь 2016 Ноябрь 2016 г. Октябрь 2016 г. Сентябрь 2016 г. август 2016 г. Июль 2016 г. Июнь 2016 май 2016 г. апрель 2016 г. Март 2016 г. февраль 2016 г. январь 2016 г. 2 ноября 015 октября 2015 г. Сентябрь 2015 г. август 2015 Июль 2015 г. Июнь 2015 май 2015 года апрель 2015 Март 2015 г. февраль 2015 Январь 2015 Ноябрь 2014 г. Сентябрь 2014 г. Июль 2014 май 2014 г. Март 2014 Январь 2014 Ноябрь 2013 г. Сентябрь 2013 г. Июль 2013 г. май 2013 г. Март 2013 г. 2012 Июнь 2012 Май 2012 г. Апрель 2012 Март 2012 г. Февраль 2012 Январь 2012 Ноябрь 2011 Октябрь 2011 Сентябрь 2011 Июль 2011 г. Июнь 2011 Май 2011 г. Апрель 2011 Март 2011 г. Февраль 2011 г. Январь 2011 г. Ноябрь 2010 г. Октябрь 2010 г. Сентябрь 2010 г. Июль 2010 г. Июнь 2010 г. 2010 Январь 2010 Ноябрь 2009 Октябрь 2009 г. Сентябрь 2009 г. Июль 2009 г. Июн 2009 г. Май 2009 г. Апрель 2009 г. Март 2009 г. Февраль 2009 г. Январь 2009 г. Ноябрь 2008 г. Октябрь 2008 г. Сентябрь 2008 г. Июль 2008 г. Июнь 2008 г. Май 2008 г. Ноябрь 2008 г. Октябрь 2008 г. Сентябрь 2008 г. 2007 г. июнь 2007 г. май 2007 г. Апрель 2007 г. Март 2007 г. февраль 2007 Январь 2007 Ноябрь 2006 г. Октябрь 2006 г. Сентябрь 2006 г.
январь 2016 г. 2 ноября 015 октября 2015 г. Сентябрь 2015 г. август 2015 Июль 2015 г. Июнь 2015 май 2015 года апрель 2015 Март 2015 г. февраль 2015 Январь 2015 Ноябрь 2014 г. Сентябрь 2014 г. Июль 2014 май 2014 г. Март 2014 Январь 2014 Ноябрь 2013 г. Сентябрь 2013 г. Июль 2013 г. май 2013 г. Март 2013 г. 2012 Июнь 2012 Май 2012 г. Апрель 2012 Март 2012 г. Февраль 2012 Январь 2012 Ноябрь 2011 Октябрь 2011 Сентябрь 2011 Июль 2011 г. Июнь 2011 Май 2011 г. Апрель 2011 Март 2011 г. Февраль 2011 г. Январь 2011 г. Ноябрь 2010 г. Октябрь 2010 г. Сентябрь 2010 г. Июль 2010 г. Июнь 2010 г. 2010 Январь 2010 Ноябрь 2009 Октябрь 2009 г. Сентябрь 2009 г. Июль 2009 г. Июн 2009 г. Май 2009 г. Апрель 2009 г. Март 2009 г. Февраль 2009 г. Январь 2009 г. Ноябрь 2008 г. Октябрь 2008 г. Сентябрь 2008 г. Июль 2008 г. Июнь 2008 г. Май 2008 г. Ноябрь 2008 г. Октябрь 2008 г. Сентябрь 2008 г. 2007 г. июнь 2007 г. май 2007 г. Апрель 2007 г. Март 2007 г. февраль 2007 Январь 2007 Ноябрь 2006 г. Октябрь 2006 г. Сентябрь 2006 г.