Техническая механика. Шпаргалка. 2. Связи и реакции связей (Аурика Луковкина, 2009)
2. Связи и реакции связей
Все тела делятся на свободные и связанные.
Свободные тела – это тела, перемещение которых не ограничено.
Связанные тела – это тела, перемещение которых ограничено другими телами.
Тела, ограничивающие перемещение других тел, называют связями.
Силы, действующие от связей и препятствующие перемещению, называют реакциями связей. Реакция связи всегда направлена с той стороны, куда нельзя перемещаться.
Всякое связанное тело можно представить свободным, если связи заменить их реакциями (принцип освобождения от связей).
Связи делятся на несколько типов.
Связь – гладкая опора (без трения) – реакция опоры приложена в точке опоры и всегда направлена перпендикулярно опоре.
Гибкая связь (нить, веревка, трос, цепь) – груз подвешен на двух нитях. Реакция нити направлена вдоль нити от тела, при этом нить может быть только растянута.
Жесткий стержень – стержень может быть сжат или растянут. Реакция стержня направлена вдоль стержня. Стержень работает на растяжение или сжатие. Точное направление реакции определяют, мысленно убрав стержень и рассмотрев возможные перемещения тела без этой связи.
Возможным перемещением точки называется такое бесконечно малое мысленное перемещение, которое допускается в данный момент.
Шарнирная опора. Шарнир допускает поворот вокруг точки закрепления. Различают два вида шарниров.
Подвижный шарнир. Стержень, закрепленный на шарнире, может поворачиваться вокруг шарнира, а точка крепления может перемещаться вдоль направляющей (площадки). Реакция подвижного шарнира направлена перпендикулярно опорной поверхности, так как не допускается только перемещение поперек опорной поверхности.
Неподвижный шарнир. Точка крепления перемещаться не может.
Стержень может свободно поворачиваться вокруг оси шарнира. Реакция такой опоры проходит через ось шарнира, но неизвестна по направлению. Ее изображают в виде двух составляющих: горизонтальной и вертикальной (Rx, Ry).
Защемление, или «заделка». Любые перемещения точки крепления невозможны.
Под действием внешних сил в опоре возникают реактивная сила и реактивный момент Мz, препятствующий повороту.
Реактивная сила представляется в виде двух составляющих вдоль осей координат:
R = Rx+ Ry.
Связи и их реакции | ПроСопромат.ру
Тела, рассматриваемые в механике, могут быть свободными и несвободными.
Свободным называют тело, которое не испытывает никаких препятствий для перемещения в пространстве в любом направлении. Если же тело связано с другими телами, которые ограничивают его движение в одном или нескольких направлениях, то оно является несвободным.
Тела, которые ограничивают движение рассматриваемого тела называют связями.
В результате взаимодействия между телом и его связями возникают силы, противодействующие возможным движениям тела. Эти силы действуют на тело со стороны связей и называются реакциями связей.
Реакция связи всегда противоположна тому направлению, по которому связь препятствует движению тела.
Определение реакций связей является одной из наиболее важных задач статики. Ниже приведены наиболее распространенные виды связей, встречающиеся в механике.
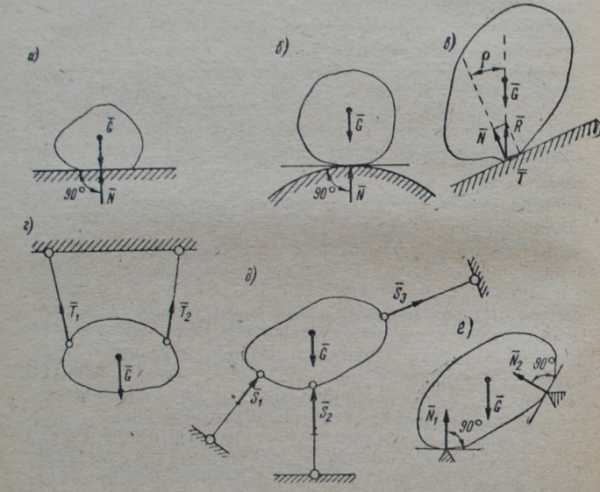
Связь в виде гладкой (т. е. без учета сил трения) плоскости или поверхности (рис.а, б). В этом случае реакция связи всегда направлена по нормали к опорной поверхности.
Связь в виде шероховатой плоскости (рис. в). Здесь возникают две составляющие реакции: нормальная N, перпендикулярная плоскости, и касательная Т, лежащая в плоскости. Касательная реакция
Полная реакция R, равная геометрической сумме нормальной и касательной составляющих
R =N + Т, отклоняется от нормали к опорной поверхности на некоторый угол ρ.
При взаимодействии тела с реальными связями возникают силы трения. Однако во многих случаях силы трения незначительны и вследствие этого ими часто пренебрегают, т. е. считают связи абсолютно гладкими.
Связи, в которых отсутствуют силы трения, называют идеальными. Приведенная выше связь в виде гладкой плоскости или поверхности относится к категории идеальных
.Гибкая связь, осуществляемая веревкой, тросом, цепью и т. п. (рис. г). Реакция гибкой связи направлена вдоль связи, причем гибкая связь может работать только на растяжение.
Связь в виде жесткого стержня с шарнирным закреплением концов (рис.д). Здесь реакции, так же как и в гибкой связи, всегда направлены вдоль осей стержней, но стержни могут быть как растянутыми, так и сжатыми.
Связь, осуществляемая ребром двугранного угла или точечной опорой (рис.е). Реакция такой связи направлена перпендикулярно поверхности опирающегося тела, если эту поверхность можно считать гладкой.
Существование реакций связей обосновывается аксиомой о действии и противодействии. Для определения реакций связей используют прием
Вот этот прием. Не изменяя равновесия тела или системы тел, каждую связь, наложенную на систему, можно отбросить, заменив ее действием реакции отброшенной связи.
prosopromat.ru
Расчетно-графическая работа. Определение реакций связей. Геометрический способ.
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ
(геометрический способ)
Последовательность решения задачи
1. Выбрать тело (точку), равновесие которого следует рассматривать.
2. Освободить тело от связей и изобразить действующие на него силы и реакции отброшенных связей.
3. Построить замкнутый силовой треугольник, соблюдая параллельность переноса сил и реакций.
4. Расставить углы в силовом треугольнике, согласно исходным данным и схеме задачи.5. Реакции связей можно определить, исходя из теоремы синусов:
6. Проверить правильность полученных результатов можно используя любой из следующих способов:
1 способ — графический — в выбранном масштабе построить замкнутый силовой многоугольник.
2 способ — аналитический — решить уравнения равновесия, используя условия равновесия системы сходящихся сил на плоскости.
å Fi х = 0;
å Fi у = 0
Пример. Определить реакции связей, удерживающих груз G=100 кН.

Рис. 1 — Схема задачи
1. Рассматриваем равновесие тела (шара) (рис. 1).
2. Освобождаем тело от связей и изображаем действующие на него силы и реакции отброшенных связей (рис. 2).
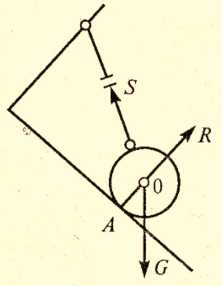
Рис. 2 — Реакции связей
3. Строим замкнутый силовой треугольник, соблюдая параллельность переноса сил и реакций и расставляем углы (рис. 3).
Рис. 3 — Силовой треугольник
4. Определяем реакции связей, исходя из теоремы синусов:
R = G sin 20/ sin 120 = 100 0,342 / 0,866 = 39,49 кН
S = G sin 40/ sin 120 = 100 0,643 / 0,866 = 74,22 кН
5. Проверим правильность полученных результатов используя аналитический метод.
Для этого освобождаем тело от связей, изображаем действующие на него активные силы и реакции связей, выбираем систему координат, совместив ось Х по направлению с реакцией R (рис. 4) и составляем уравнения равновесия для системы сил, действующих на тело:

Рис. 4 — Выбор систем координат
å Fi х = 0; R + S cos 60 — G cos 40 = 0 (1)
å Fi у = 0; S cos 30 — G cos 50 = 0 (2)
6. Определяем реакции связей R и S решая уравнения.
Из уравнения ( 2 ) получаем
S = G cos 50 / cos 30 = 100 0,643 / 0,866 = 74,22 кН
Подставляя найденное значение S в уравнение ( 1 ), получаем
R = G cos 40 — S cos 60 =100 0,766 — 74,22 0,5 = 39,49 кН
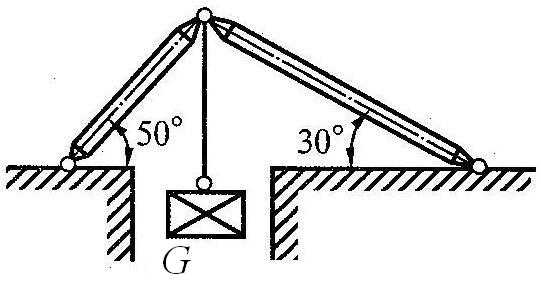
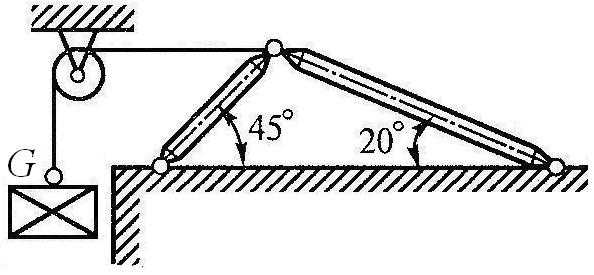
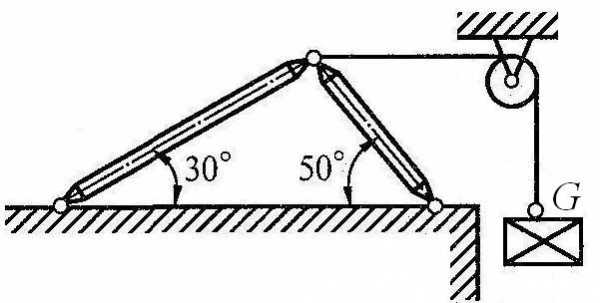
Задача 1. Определить реакции стержней, удерживающих груз весом G. Массой стержней пренебречь. Схему своего варианта смотри на рисунке 5. Числовые данные своего варианта взять из таблицы 1.
Таблица 1 — Исходные данные
Номер схемы на рисунке 5
G
1
2
3
4
5
6
7
8
9
Варианты
кH
1
2
3
4
5
6
7
8
9
10
10
11
12
13
14
15
16
17
18
20
19
20
21
22
23
24
25
26
27
30
28
29
30
40
1
2
3
4

5
6
7
8
9

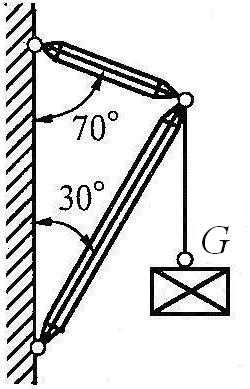
Рис. 5 — Схема задачи
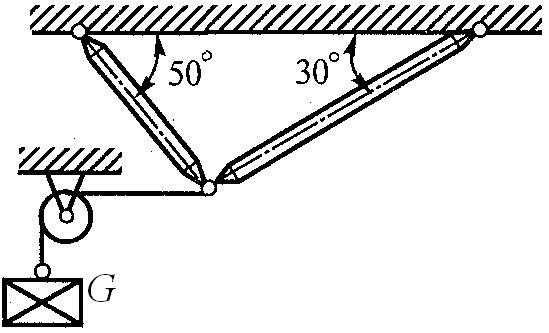
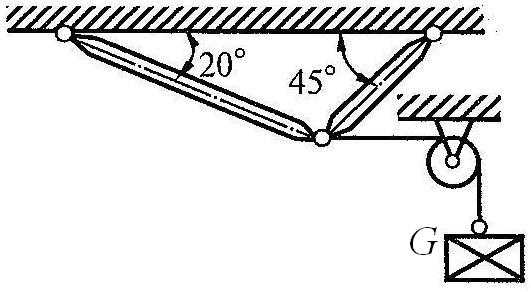
Задача 2. Определить реакции связей, удерживающих груз весом G.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
infourok.ru
2.4 Определение реакций связи аналитическим методом
Пример (рис. 2.6, а). В точке В подвешены два груза — груз G1 = 600 Н и G2 = 400 Н. Определить реакции стержней АВ и ВС.
Этапы решения
1) Чертим расчетную схему (рис. 2.6, б). Для этого находим точку, где пересекаются линии действия всех сил. Это узел В. Прикладываем к нему на расчетной схеме внешние силы G1 и G2 (рис. 2.7, б).
2) Освобождаем выделенную точку от связей, а их действие заменяем реакциями. Связи в точке В осуществляются стержнями АВ и ВС. Прикладываем вместо них на расчетной схеме реакции стержней R1 и R2.
3) Выбираем координатные оси х и у (рис.2.6, б). Направление координатных осей х и у следует выбирать так, чтобы хотя бы одна из осей была перпендикулярна неизвестным силам (реакциям).

а)
а) Схема нагружения б) Расчетная схема
Рис. 2.6
4) Составляем уравнения равновесия:
Fix = 0; R1 – G2 Cos45o + R2 Cos45o=0
Fiу = 0; G1 + R2 Cos45o + G2 Cos45o=0
5) Решаем
уравнения: R2 = — G2 —  =
— 400 —
=
— 400 —  =
— 1249 Н.
=
— 1249 Н.
R1 = G2 Cos45o — R2 Cos45o= 400 0,707 – (-1249)0,707 = 1166 Н.
Знак минус перед значением реакции R2 показывает, что она направлена в противоположную сторону от выбранного направления.
Лекция № 3 пара сил и моменты сил
3.1 Пара сил
Пара сил – это две равные и параллельные силы, направленные в противоположные стороны и не лежащие на одной прямой. Пара сил, действующая на тело, стремится вращать это тело (рис. 3.1).
Рис. 3.1 Рис. 3.2
Плечо пары (а) — кратчайшее расстояние между линиями действия сил (плечо всегда перпендикулярно силам).
Момент пары сил (М) — равен произведению одной из сил на ее плечо:
М = Fa = F‘a, Нм (3.1)
Момент пары сил положительный, если пара стремится повернуть тело по часовой стрелке (рис. 3.1, а), и отрицательным, если пара стремится вращать тело против часовой стрелки (рис. 3.1, б).
3.2 Сложение и равновесие пар сил на плоскости
Сложение пар производится алгебраическим суммированием их моментов:
М = М1 + М2 + …+ Мn = ΣМi
Условие равновесия системы пар, лежащих в одной плоскости: для равновесия системы пар необходимо чтобы сумма моментов пар равнялась нулю:
ΣМi = 0 (3.2)
Пример 3.1. Определить момент результирующей пары, эквивалентной системе трех пар, лежащих в одной плоскости (рис. 3.3). Первая пара F1 = F1 = 2 кН, плечо h1 = 1,25 м; вторая пара F2 = F2 = 3 кН, плечо h 2 = 2 м; третья пара F3 = F3 = 4,5 кН, плечо h3 = 1,2 м.
Решение:
М1 = F1 h1 = 21,25 = 2,5 кНм; М2 = — F 2h2 = — 3 2 = — 6 кНм; М3 = F3 h3 = 4,5 1,2 = 5,4 кНм.
М = М1 + М2 + М3 = 2,5 — 6 + + 5,4 = 1,9 кНм.
Рис. 3.3
studfiles.net
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ)
ЭНЕРГЕТИЧЕСКИМ МЕТОДОМ
Силовой фактор S в линейно деформируемой системе определяется как производная потенциальной энергии
упругой деформации U (ПЭУД) по соответствующему
перемещению S по направлению S
( т е о р е м а Л а г р а н ж а ):
S dU d S

К о н т р о л ь н ы е в о п р о с
ы
( в скобках даны номера слайдов, на которых можно найти ответы на вопросы; для перехода к слайду с ответом можно сделать щелчок мышью по номеру в
скобках*); для возврата к контрольным вопросам сделать щелчок правой кнопкой мыши
и выбрать «Перейти к слайду 22» )
1. Какие силовые факторы определяются в расчётах сооружений и конструкций? ( 2 ) 2. Перечислить основные методы определения силовых факторов. ( 2 )
3. В чём сущность статического метода определения реакций связей и внутренних усилий? ( 2 )
4. Какими уравнениями описывается равновесие а) дифференциально-малого элемента ( 2 )
б) дискретной ( конечно-элементной ) линейно деформируемой системы? ( 2 )
5. Каково соотношение между числом уравнений равновесия и количеством искомых силовых факторов в случае статически определимой системы? ( 2 )
6. В чём суть универсальной процедуры формирования уравнений равновесия, реализующей концепцию конечных элементов? ( 5 )
7. Из каких групп состоит система уравнений равновесия, формируемых с помощью универсальной процедуры? ( 4 ) ( 6 )
8. Какие особенности имеет применение статического метода к статически неопределимым системам? ( 7 )
9. Каково необходимое и достаточное аналитическое ( статическое ) условие геометрической неизменяемости системы? ( 4 ) ( 7 )
10. На чём основан кинематический метод определения реакций связей ( силовых факторов )? Дать формулировку принципа Лагранжа. ( 8 )
11. Что такое возможные ( виртуальные ) перемещения? – три их свойства. ( 9 )
12. Какая обязательная процедура предшествует заданию виртуальных перемещений при реализации кинематического метода определения реакции некоторой связи? ( 10 )
13. Что такое обобщённая нагрузка и обобщённое перемещение? ( 10 )
_____________________________________________________
*) Только в режиме «Показ слайдов»
К о н т р о л ь н ы е в о п р о с
ы
( в скобках даны номера слайдов, на которых можно найти ответы на вопросы; для перехода к слайду с ответом можно сделать щелчок мышью по номеру в
скобках*); для возврата к контрольным вопросам сделать щелчок правой кнопкой мыши
и выбрать «Перейти к слайду 23» )
14. Изложить алгоритм определения реакции связи кинематическим методом. ( 11 )
15. Основная формула кинематического метода для определения силового фактора S . ( 11 )
16. Что такое F и S в основной формуле кинематического метода? ( 10 ) 17. Каково правило знаков для перемещений F и S? ( 10 )
18. Какие связи должны удаляться при определении внутренних силовых факторов кинематическим методом? ( самостоятельно )
19. Какая связь удаляется при определении кинематическим методом изгибающего момента в определённом сечении стержневого элемента? Что появляется в сечении в результате удаления связи? ( 16 )
20. Какой смысл имеет величина S в случае определения изгибающего момента М ? ( 16 )
21. Какая связь удаляется при определении кинематическим методом поперечной силы в сечении стержневого элемента? Что появляется в сечении в результате удаления связи? ( 17 )
22. Какой смысл имеет величина S в случае определения поперечной силы Q ? ( 18 )
23. Какая связь удаляется при определении кинематическим методом продольной силы в сечении стержневого элемента? Что появляется в сечении в результате удаления связи? ( 19 )
24. Какой смысл имеет величина S в случае определения продольной силы N ? ( 20 )
25. На чём основан энергетический метод определения силовых факторов в деформируемых системах? ( 21 )
26. Аналитическая запись энергетической теоремы Лагранжа для определения силового фактора S . ( 21)
_____________________________________________________
*) Только в режиме «Показ слайдов»
studfiles.net
Вопрос 22(Равновесие системы тел. Определение реакций внешних и внутренних связей)
Равновесие системы тел
Статический расчет системы тел сводится к рассмотрению условий равновесия конструкций, состоящих из тел, соединенных какими-нибудь связями. Связи, соединяющие части конструкции называются внутренними, скрепляющие конструкцию с другими телами, в нее не входящими внешними.
При решении задач статики реакции связей входят в число неизвестных, которые необходимо определить из уравнений равновесия. Система тел, для которых число неизвестныхреакций связей равно числу уравнений равновесия, называются статически определимыми. Система тел, для которых число неизвестных реакций связей больше числа уравненийравновесия, называются статически неопределимыми.
Если при отбрасывании внешних связей (опор) конструкция остается жесткой, то для нее задача о равновесии решается как для абсолютно твердого тела (при действии плоской системы сил число неизвестных реакций связей не должно быть больше трех).
Если после отбрасывания внешних связей конструкция не считается жесткой, то наиболее рациональным способом решения подобных задач является расчленение на отдельные тела и составление уравнений равновесия для каждого из тел в отдельности.
Для конструкции из n тел, на каждое из которых действует произвольная плоская система сил, получится таким путем 3n уравнений равновесия, позволяющих найти 3nнеизвестных.
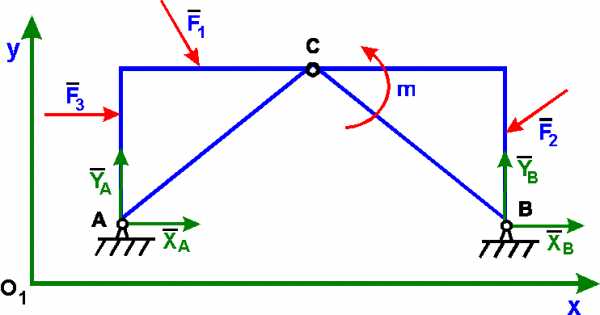
Например, если отбросить опоры А и В трехшарнирной арки, то она не будет жесткой: ее части могут поворачиваться вокруг шарнира С. Для определения реакций внешних связейХА, YА, ХВ, YВ расчленим конструкцию по соединительному шарниру С на две части и рассмотрим равновесие каждой из частей в отдельности.
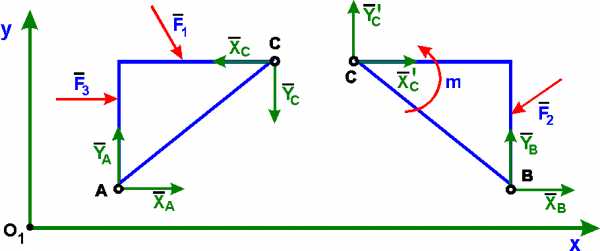
При действии на трехшарнирную арку произвольной плоской системы сил для каждой части можно записать три уравнений равновесия:
для АС для СВ
Присоединить к этой системе шести уравнений на основании закона о действии и противодействии уравнения для узла С (ХС = ХС, YС = YС), получим систему уравнений из которой можно найти реакции внешних связей ХА, YА, ХВ, YВ и реакции внутренних связей ХС, YС.
Вопрос 23(Трение скольжения. Законы трения. Коэффициент, угол, конус трения. Область равновесия)
Тре́ние — процесс взаимодействия тел при их относительном движении (смещении) либо при движении тела в газообразной или жидкой среде. По-другому называетсяфрикционным взаимодействием (англ. friction). Изучением процессов трения занимается раздел физики, который называется механикой фрикционного взаимодействия, или трибологией.
Трение главным образом имеет электронную природу при условии, что вещество находится в нормальном состоянии. В сверхпроводящем состоянии вдалеке от критической температуры основным «источником» трения являются фононы, а коэффициент трения может уменьшиться в несколько раз
Установлены следующие приближенные законы трения качения.
Первый закон. Максимальный момент пары сил, препятствующий качению, в широких пределах не зависит от радиуса катка.
Второй закон. Максимальный момент сопротивления качению пропорционален силе нормального давления катка на опорную плоскость и достигается в момент выхода катка из положения равновесия
;
(условие начала качения катка).
Коэффициент называют коэффициентом трения качения или коэффициентом трения 2-го рода. Он имеет размерность длины.
Коэффициент трения качения равен плечу пары сопротивления качения при предельном равновесии катка (рис. 1.29).
Третий закон. Коэффициент трения качения зависит от материала катка, опорной плоскости, а также от физического состояния их поверхностей.
В момент начала качения катка (выхода катка из положения равновесия) имеем (рис. 1.29)
; ; .
Коэффициенты трения качения устанавливаются экспериментально.
Пусть твердое тело под действием активных сил находится на шероховатой поверхности в предельном состоянии равновесия, когда сила трения достигает своего максимального значения при данном значении реакции (рис. 1.28). В этом случае полная реакция шероховатой поверхности отклонена от нормали общей касательной плоскости трущихся поверхностей на наибольший угол .
Угол между полной реакцией, построенной на наибольшей силе трения при данной нормальной реакции, и направлением нормальной реакции, называется углом трения
; .
Из рис. 1.28 следует
; .
Тангенс угла трения равен коэффициенту трения
.
Конус с вершиной в точке приложения нормальной реакции шероховатой поверхности, образующая которого составляет угол трения с этой нормальной реакцией, называетсяконусом трения (рис. 1.28).
Все максимальные реакции шероховатой поверхности направлены вдоль образующих конуса трения.
Если коэффициент трения во всех направлениях одинаков, то конус трения круговой.
Конус трения интересен тем, что ограниченная им область определяет область равновесия тела. Если линия действия равнодействующей активных сил проходит внутри конуса трения, то эта сила не сдвигает тело, как бы она не была велика. Если же линия действия равнодействующей активных сил расположена вне конуса трения, то эта сила сдвинет тело, как бы мала она не была.
Конус трения интересен тем, что ограниченная им область определяет область равновесия тела. Если линия действия равнодействующей активных сил проходит внутри конуса трения, то эта сила не сдвигает тело, как бы она не была велика. Если же линия действия равнодействующей активных сил расположена вне конуса трения, то эта сила сдвинет тело, как бы мала она не была.
studopedia.net
Определение — реакция — связь
Определение — реакция — связь
Cтраница 2
Действие сил инерции учитывается при решении многих технических задач и, в частности, при определении реакций связей движущейся несвободной механической системы. [16]
Если тело закреплено наложенными связями жестко, то все равенства ( 1) дают ур-ния для определений реакций связей. Такого рода задачи часто решаются в технике. Пи основании отвердевания принципа, равенства ( 1), не содержащие реакций внешних связей, дают одновременно необходимые ( по не достаточные) условия равновесия любой механич. Необходимые и достаточные условия равновесия любой механич. [17]
Отметим, что в этом случае первое уравнение служит для определения закона движения, а второе и третье — для определения реакции связи. [18]
Если число связей, соединяющих ферму с фундаментом, больше трех, то уравнений ( 7 — 3) становится недостаточно; такая ферма называется внешне статически неопределимой, и для определения реакций связей требуются дополнительные условия по числу лишних связей. Когда имеет место один из двух исключительных случаев, рассмотренных выше, то в зависимости от направления равнодействующей внешних сил уравнения ( 7 — 3) дадут либо неопределенные, либо бесконечно большие значения неизвестных реакций R или же этих уравнений окажется недостаточно для определения реакций опор. Ввиду того что при закреплении опор такие случаи практически не встречаются, они подробно здесь не рассматриваются. [19]
Не изменяя равновесия тела, каждую связь можно отбросить, заменив ее реакцией. Определение реакций связей является одной из наиболее важных задач статики. [20]
Существование реакций обосновывается аксиомой о действии и противодействии. Для определения реакций связей используют принцип освобождения от связей. [21]
Существование реакций обосновывается аксиомой о действии и противодействии. Для определения реакций связей используют прием освобождения от связей. [22]
Из перечисленных в первую очередь необходимо научиться решать задачи первого и второго типов. Задачи на определение реакций связей системы движущихся тел требуют для решения знания линейных и угловых ускорений звеньев. То есть могут быть решены только после решения задачи второго типа. Исключением здесь являются задачи, где система тел движется равномерно или находится в покое. [23]
Статический способ является основным в методе перемещений, что объясняется его простотой и наглядностью. Он основан на использовании уравнений равновесия для определения реакций введенных связей, которые и являются искомыми коэффициентами при неизвестных и свободными членами канонических уравнений. Коэффициенты при неизвестных и свободные члены уравнений, представляющие реактивные усилия во введенных стержневых связях, могут быть определены из условий равновесия некоторой отсеченной части основной системы, содержащей эти связи. Как уже было сказано, положительное направление определяемой реакции, моментной или силовой, совпадает с принятым направлением неизвестного угла поворота или линейного смещения узла. [24]
Одним из центральных моментов в алгоритмизации задач статики, позволяющих реализовать их на ЭВМ, является вопрос типизации и формализации расчетных схем, так как уровень сложности задач, которые целесообразно выносить для решения в диалоговом режиме, с одной стороны, зависит от степени подготовленности самих студентов, а с другой стороны, от наличия отработанных расчетных схем. К числу таких задач целесообразно отнести задачи на определение реакций связей в шарнирно-стержневых конструкциях, нагруженных произвольной плоской системой сил. Такие задачи приведены, например, в [2] и применяются в контрольных работах на кафедре теоретической механики Таллинского политехнического института. [25]
Наряду со статически определимыми системами существуют так называемые статически неопределимые системы. Под статически неопределимой системой понимается такая, для которой определение реакций связей и внутренних силовых факторов не может быть произведено при помощи уравнений равновесия и метода сечений. [26]
Наряду со статически определимыми системами существуют так называемые статически неопределимые системы. Под статически неопределимой системой понимается такая, для которой определение реакций связей и внутренних силовых факторов не может быть произведено при помощи уравнений равновесия и метода сечений. [27]
Обыкновенно закон движения несвободной материальной системы находят при помощи интегрирования уравнений других типов, с которыми мы познакомимся впоследствии. Уравнениями с множителями и в особенности равенствами (30.32) пользуются лишь для определения реакций связей. Zv известны как функции времени, из уравнений (30.32) легко найти ссе множители л и jj, и, следовательно, по формуле (30.15) можно определить реакции в функции времени. [28]
Чтобы уравнение (IV.200) определяло действительное движение несвободной материальной точки, следует соответственно определить реакцию R. Таким образом, вопрос об изучении движения несвободной материальной точки усложняется по сравнению с задачами динамики свободной материальной точки тем, что связывается с определением реакции связи R. Чтобы составить в наиболее удобной форме систему уравнений, необходимую для решения задачи о движении несвободной материальной точки, применим координатный способ, связав его с методом множителей Лагранжа. [29]
В сложных несвободных механических системах определение реакций связей с помощью уравнений равновесия становится громоздким и потому мало пригодным. [30]
Страницы: 1 2 3
www.ngpedia.ru