Условия равновесия: первое, второе. Виды равновесия: устойчивое, неустойчивое, безразличное, опрокидывание. Формулы, примеры
Тестирование онлайн
Равновесие
Состояние тела, которое не изменяется со временем. Например, тело длительно находится в покое или движется равномерно, или длительно вращается.
Первое условие равновесия
Векторная сумма всех действующих на тело сил равна нулю.
Рассмотрим на примере первое условие равновесия

Предмет будет находиться в равновесии, если векторная сумма всех сил (Fтр1, Fтр2, N1, N2, mg) равна нулю. То есть
Второе условие равновесия
Векторная сумма моментов сил равна нулю
Точку О выберем в точке пересечения Fтр2 и N2. Плечи этих сил равны нулю, значит и моменты этих сил равны нулю.
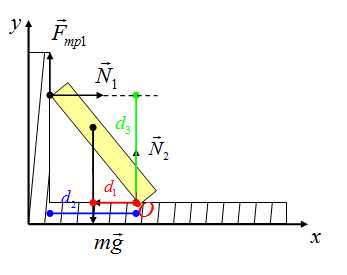
Определяем плечи сил Fтр1, N1 и mg и направление моментов сил (положительное или отрицательное).
Равновесие бывает устойчивым (тело возвращается в свое первоначальное положение), неустойчивым (тело не возвращается в свое первоначальное состояние), безразличное (тело остается в равновесии, несмотря на то, что на него подействовали (например переложили книгу из одного места на столе в другое). Тело стремится занять такое состояние, при котором его потенциальная энергия будет минимальной, центр масс стремиться быть ниже.
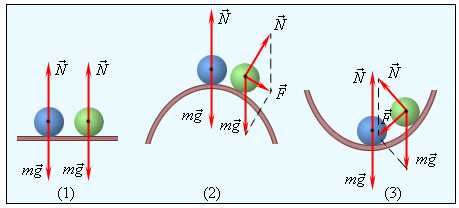
1 — безразличное равновесие, 2 — неустойчивое равновесие, 3 — устойчивое равновесие
На рисунке изображено условие опрокидывания тела.
Тело слева возвращается в исходное состояние. Тело справа опрокидывается.
Тело, имеющее площадь опоры, находится в состоянии устойчивого равновесия, если вертикаль, проведенная через центр масс этого тела, не выходит за рамки контура, ограниченного точками соприкосновения тела с опорой. Если же эта вертикаль проходит вне указанного контура, тело опрокидывается.
fizmat.by
| СТАТИКА. УСЛОВИЯ РАВНОВЕСИЯ ТЕЛ. | |
Статика — раздел механики, в котором рассматривается равновесие тел. Равновесие тел — состояние механической системы, в которой тела остаются неподвижными по отношению к выбранной системе отсчета. | |
Равновесие тел при отсутствии вращения (линии действия сил пересекаются в одной точке): Векторная сумма всех сил, действующих на тело, равна нулю(алгебраическая сумма проекций всех сил на любую ось равна нулю). или | |
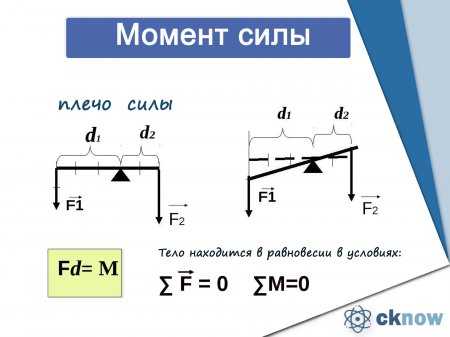
Момент силы — равен произведению силы на плечо: Плечо силы Момент силы, вращающий тело против часовой стрелки, считают положительным, по часовой стрелке — отрицательным. | |
Центр масс — точка, через которую должна проходить линия действия силы, чтобы под действием этой силы тело двигалось поступательно. Центр тяжести — точка приложения силы тяжести, действующей на тело. В однородном поле тяготения центр тяжести и центр масс совпадают. |
|
Рычаг (Архимед). Разновидности рычага: блок, ворот. Условие равновесия рычага: отношение сил обратно пропорционально отношению плеч этих сил. «Золотое правило механики»: выигрывая в силепроигрываешь в расстоянии. | |
Равновесие тел при отсутствии вращения (линии действия сил не пересекаются в одной точке): 1. Векторная сумма всех сил, действующих на тело, равна нулю; 2. Алгебраическая сумма моментов всех сил, действующих на тело, относительно любой точки равна нулю. | |
Т.е. | |
ПАРА СИЛ: Момент пары: Пару нельзя уравновесить одной силой (равной величины)! Примеры: завинчивание гайки гаечным ключом, вращение рамки с током в магнитном поле и т.д. | |
Виды равновесия: Устойчивое: При малом отклонении тела от положения равновесия возникает сила, стремящаяся возвратить тело в исходное состояние. | |
Безразличное: При малом отклонении тело остается в равновесии. | |
Неустойчивое: При малом отклонении тела из положения равновесия возникают силы, стремящиеся увеличить это отклонение. | |
В положении устойчивого равновесия тело обладает минимальной потенциальной энергией. При выведении тела из этого положения его потенциальная энергия увеличивается. Если работу над телом совершает только сила тяжести, то в положении устойчивого равновесия центр тяжести тела находится на наименьшей высоте. Все тела стремятся к минимуму потенциальной энергии. (Потенциальная яма). |
|
Равновесие тел на опоре: линия действия силы тяжести проходит через площадь опоры (Пизанская башня). Чем ниже центр тяжести, тем более устойчиво равновесие. |
|
www.eduspb.com
Второе условие равновесия
Физика > Второе условие
Рассмотрим второе условие равновесия. Как выглядит момент силы, как формулируется второе условие равновесия, роль вращательного момента, нулевая чистая сила.
Второе условие статического равновесия: чистый вращательный момент, влияющий на объект, приравнивается к нулю.
Задача обучения
- Определить второе условие статического равновесия.
Основные пункты
- Второе условие равновесия: исключить ускоренное вращение.
- Вращающееся тело или система могут пребывать в равновесии, если скорость постоянная.
- Величина вращательного момента вокруг оси вращения выражается как τ = rFsinθ.
Термины
- Равновесие – положение тела в состоянии покоя или равномерного движения, где все силы приравниваются к нулю.
- Вращательный момент – вращательный эффект, измеряющийся в ньютонах на метр.
- Дети на нижнем рисунке отображают статическое равновесие. Подобные объекты не располагают ускорением или же тело движется, но с неизменной скоростью.
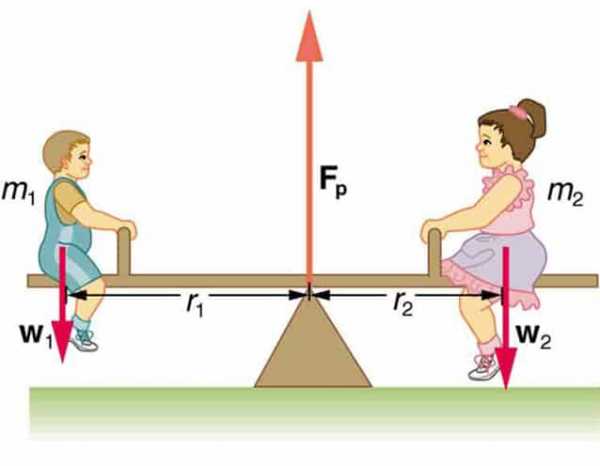
Система расположена в статическом равновесии, где ни в одном направлении нет ускорения
Если объекты расположены в статическом равновесии, то чистая сила и вращательный момент должны приравниваться к нулю.
Давайте посмотрим:
Чистая числа должна быть нулевой
Тогда все силы балансируют во всех направлениях. Например, смещающаяся по дороге машина делает это со стабильной скоростью. Она находится в равновесии, потому что нет ускорения в каком-то направлении: Fnet = ma = 0.
Чистый вращательный момент должен быть нулевым
Равновесие сохраняется, если скорость вращения стабильна и не поддается влиянию сил.
Можно проследить за воздействующими факторами на примере дверных петель. Величина, направление и точка действия силы определяются как физические величины – вращательный эквивалент силы. Это мера эффективности силы при изменении или ускорении вращения.
В виде уравнения величина вращательного момента выглядит как τ = rFsinθ, где τ (греческая буква тау) – вращательный момент, r – дистанция от точки поворота к точке применения силы, F – величина силы, а θ – угол между силой и вектором, направленным от точки действия к опорной.
v-kosmose.com
Условия равновесия тел
Статикой называется раздел механики, изучающий условия равновесия тел.
Из второго закона Ньютона следует, что если геометрическая сумма всех внешних сил, приложенных к телу, равна нулю, то тело находится в состоянии покоя или совершает равномерное прямолинейное движение. В этом случае принято говорить, что силы, приложенные к телу, уравновешивают друг друга. При вычислении равнодействующей все силы, действующие на тело, можно прикладывать к центру масс.
Чтобы невращающееся тело находилось в равновесии, необходимо, чтобы равнодействующая всех сил, приложенных к телу, была равна нулю.
или
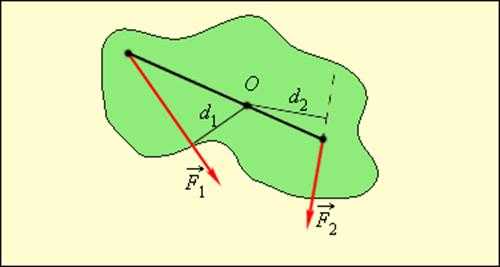
|
Рисунок 1.14.1. Равновесие твердого тела под действием трех сил. При вычислении равнодействующей все силы приводятся к одной точке C |
На рис. 1.14.1 дан пример равновесия твердого тела под действием трех сил. Точка пересечения O линий действия сил и не совпадает с точкой приложения силы тяжести (центр масс C), но при равновесии эти точки обязательно находятся на одной вертикали. При вычислении равнодействующей все силы приводятся к одной точке.
Если тело может вращаться относительно некоторой оси, то для его равновесия недостаточно равенства нулю равнодействующей всех сил.
Вращающее действие силы зависит не только от ее величины, но и от расстояния между линией действия силы и осью вращения.
Длина перпендикуляра, проведенного от оси вращения до линии действия силы, называется плечом силы.
Произведение модуля силы на плечо d называется моментом силы M. Положительными считаются моменты тех сил, которые стремятся повернуть тело против часовой стрелки (рис. 1.14.2).
Правило моментов: тело, имеющее неподвижную ось вращения, находится в равновесии, если алгебраическая сумма моментов всех приложенных к телу сил относительно этой оси равна нулю:
В Международной системе единиц (СИ) моменты сил измеряются в Ньютон—метрах (Н∙м).
|
Рисунок 1.14.2. Силы, действующие на рычаг, и их моменты. M1 = F1 · d1 > 0; M2 = – F2 · d2 < 0. При равновесии M1 + M2 = 0 |
В общем случае, когда тело может двигаться поступательно и вращаться, для равновесия необходимо выполнение обоих условий: равенство нулю равнодействующей силы и равенство нулю суммы всех моментов сил.
Модель. Равновесие брусков. |
Оба эти условия не являются достаточными для покоя.
|
Рисунок 1.14.3. Качение колеса по горизонтальной поверхности. Равнодействующая сила и момент сил равны нулю |
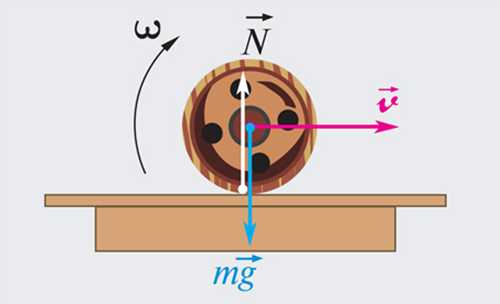
Катящееся по горизонтальной поверхности колесо – пример безразличного равновесия (рис. 1.14.3). Если колесо остановить в любой точке, оно окажется в равновесном состоянии. Наряду с безразличным равновесием в механике различают состояния устойчивого и неустойчивого равновесия.
Состояние равновесия называется устойчивым, если при малых отклонениях тела от этого состояния возникают силы или моменты сил, стремящиеся возвратить тело в равновесное состояние.
При малом отклонении тела из состояния неустойчивого равновесия возникают силы или моменты сил, стремящиеся удалить тело от положения равновесия.
Шар, лежащий на плоской горизонтальной поверхности, находится в состоянии безразличного равновесия. Шар, находящийся в верхней точке сферического выступа, – пример неустойчивого равновесия. Наконец, шар на дне сферического углубления находится в состоянии устойчивого равновесия (рис. 1.14.4).
|
Рисунок 1.14.4. Различные виды равновесия шара на опоре. (1) – безразличное равновесие, (2) – неустойчивое равновесие, (3) – устойчивое равновесие |

Для тела, имеющего неподвижную ось вращения, возможны все три вида равновесия. Безразличное равновесие возникает, когда ось вращения проходит через центр масс. При устойчивом и неустойчивом равновесии центр масс находится на вертикальной прямой, проходящей через ось вращения. При этом, если центр масс находится ниже оси вращения, состояние равновесия оказывается устойчивым. Если же центр масс расположен выше оси – состояние равновесия неустойчиво (рис. 1.14.5).
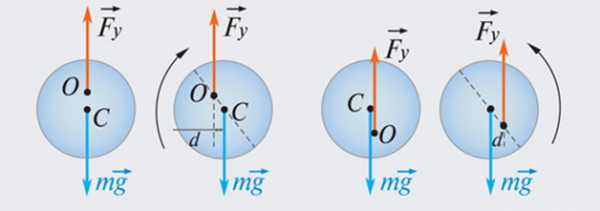
|
| Рисунок 1.14.5. Устойчивое (1) и неустойчивое (2) равновесие однородного круглого диска, закрепленного на оси O; точка C – центр массы диска; – сила тяжести; – упругая сила оси; d – плечо |
Особым случаем является равновесие тела на опоре. В этом случае упругая сила опоры приложена не к одной точке, а распределена по основанию тела. Тело находится в равновесии, если вертикальная линия, проведенная через центр масс тела, проходит через площадь опоры, т. е. внутри контура, образованного линиями, соединяющими точки опоры. Если же эта линия не пересекает площадь опоры, то тело опрокидывается. Интересным примером равновесия тела на опоре является падающая башня в итальянском городе Пиза (рис. 1.14.6), которую по преданию использовал Галилей при изучении законов свободного падения тел. Башня имеет форму цилиндра высотой 55 м и радиусом 7 м. Вершина башни отклонена от вертикали на 4,5 м.
Вертикальная линия, проведенная через центр масс башни, пересекает основание приблизительно в 2,3 м от его центра. Таким образом, башня находится в состоянии равновесия. Равновесие нарушится и башня упадет, когда отклонение ее вершины от вертикали достигнет 14 м. По-видимому, это произойдет очень нескоро.
|
Рисунок 1.14.6. Падающая Пизанская башня. Точка C – центр масс, точка O – центр основания башни, CC’ – вертикаль, проходящая через центр масс |

questions-physics.ru
1.3.2 Условия равновесия твердого тела в ИСО
Видеоурок: Равновесие телЛекция: Равновесие тел
Под равновесием понимают такое состояние тела, при котором оно остается неподвижным относительно выбранной ИСО.
Раздел физики, который изучает равновесие, называется статикой.
Условия равновесия
Существует два основных условия равновесия тел:
1. Исходя из известного нам II закона Ньютона, чтобы тело оставалось неподвижным, суммарная (равнодействующая) сила должна быть равна нулю. То есть, чтобы определить условие, при котором тело будет находиться в равновесии, сумму проекций сил на любую ось, следует приравнять к нулю:
2. Второе условие касается моментов сил:
Чтобы тело находилось в равновесии, сумма моментов на все оси тоже должна равняться нулю.
Для определения знака момента следует помнить правило:
Если момент вращает тело против часовой стрелки, то он отрицательный, если по часовой стрелке — положительный.
Следует запомнить некоторое уточнение: Если тело находится в равновесии, это еще не значит, что оно покоится.
Общие рекомендации по решению задач на статику
В основе каждого алгоритма лежит два основных условия равновесия, которые следует записать в первую очередь в проекциях с учетом знаков.
Для тела, двигающегося поступательно без вращений, следует:
1. Сделать схематический рисунок условия задачи. На данном рисунке следует обозначить все силы, указывая направления и точки приложения. На рисунке следует указать ось и плечо.
2. На рисунке следует указать направления осей. Они выбираются произвольно с учетом удобства нахождения проекций.
3. Записать условия равновесия. Если количество сил не превышает трёх, то для удобства их следует объединить в один треугольник, в котором можно воспользоваться теоремой синусов, косинусов, Пифагора для определения неизвестных величин.
Решение задач для тел, имеющих ось вращения:
1. На рисунке указать все силы, плечи, направление моментов.
2. Составить уравнения равновесия относительно оси. Если ось не задана, то установить её в неподвижной точке тела. Относительно данной оси следует определить знаки моментов.
3. Составить систему уравнений равновесия и решить её относительно неизвестной величины.
cknow.ru
Физика Момент силы. Второе условие равновесия твёрдого тела
Описание видеоурока
Одним из условий равновесия твердого тела является геометрическая сумма внешних сил, действующих на тело, которая должна быть равна нулю. Это условие является необходимым, но не является достаточным. Чтобы в этом убедиться проведем опыт. Приложим к дощечке, лежащей на плоской поверхности, в различных точках две силы равные по модулю, но направленные в противоположные стороны. Сумма этих двух сил равна нулю. Но дощечка не останется в равновесии, она будет поворачиваться. Первое условие равновесия твердого тела выполняется, но тело не находится в равновесии.
Другой пример, на руль автомобиля во время поворота действуют две силы, приложенные в двух разных точках. Эти силы одинаковые по модулю и противоположно направленные. Сумма этих двух сил так же равна нулю, а руль не находится в состоянии покоя.
Почему же так происходит? Тело находится в равновесии, если сумма всех приложенных к каждому его элементу сил равна нулю. В наших примерах сумма внешних сил, приложенных к телу, равна нулю. Но если брать каждый отдельный элемент, сумма действующих на него сил может быть не равна нулю. Поэтому и дощечка, и руль в данных случаях не находятся в равновесии.
Для того чтобы выяснить, какое же еще условие должно выполняться, чтобы твердое тело находилось в равновесии, вспомним теорему об изменении кинетической энергии. Изменение кинетической энергии тела за некоторый промежуток времени равно работе, совершенной за то же время силой, действующей на тело.
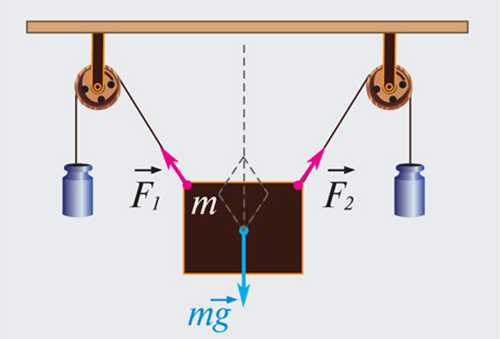
Рассмотрим пример, при каком условии будет оставаться в равновесии стержень, шарнирно закрепленный на горизонтальной оси в точке 0. Эта конструкция представляет собой обыкновенный рычаг. Пусть к рычагу приложены две перпендикулярные стержню силы F1 и F2. Предположим, что это силы натяжения веревок, к концам которых прикреплены грузы. Кроме этих двух сил, на рычаг ещё действует направленная вертикально вверх сила реакции опоры со стороны оси рычага F3. При равновесии рычага сумма всех трех сил равна нулю.
Найдем работу, которую совершают внешние силы при повороте рычага на очень малый угол α. Точка приложения силы F1 пройдет путь равный BB1. А точка приложения силы F2 пройдёт путь равный CC1. Так как угол α невелик, можно считать линии BB1 и CC1 отрезками прямой. Работа силы F1 положительна, потому что точка B перемещается в том же направлении, что и сила, а работа силы F2 отрицательна, так как точка приложения силы C движется в сторону противоположную направлению силы. Сила F3 работы не совершает, потому что точка 0 не перемещается.
Пройденные пути s1 и s2 можно выразить через угол поворота рычага α, измеренный в радианах. Тогда перемещение точки приложения силы F1 равно произведению угла α на длину отрезка BO. А перемещение точки приложения силы F2 равно произведению угла α на длину отрезка СO.
Подставим эти равенства в формулы работы сил F1 и F2. Получим, что работа силы F1 равна произведению модуля силы F1 на угол α и на длину отрезка ВО. Работа силы F2 равна произведению модуля силы F2 на угол α и на длину отрезка СО.
Радиусы ВО и СО дуг окружностей, описываемых точками приложения сил F1 и F2, являются перпендикулярами, опущенными из оси вращения на линии действия этих сил.
Кратчайшее расстояние от оси вращения до линии действия силы называют плечом силы.
Плечо силы обозначим буквой d. Плечо силы F1 равно d1. Плечо силы F2 равно d2.
Тогда выражения для работы сил F1 и F2 примут следующий вид. Работа силы F1 равна произведению модуля силы F1 на угол α и на плечо силы F1. Работа силы F2 равна произведению модуля силы F2 на угол α и на плечо силы F2.
Полученные формулы показывают, что при заданном угле поворота тела работа каждой приложенной к этому телу силы равна произведению модуля силы на плечо взятому со знаком «+» или «-». Это произведение называют моментом силы.
Моментом силы относительно оси вращения тела называется произведение модуля силы на ее плечо. Момент силы может быть положительным или отрицательным.
Если сила, действующая на тело, направлена так, чтобы повернуть его против часовой стрелки, то момент силы считают положительным, если по часовой, то отрицательным.
В нашем примере момент силы F1 равен произведению модуля силы F1 на плечо силы F1. Момент силы F2 равен произведению модуля силы F2 на плечо силы F2. Сила F1 стремится повернуть стержень против часовой стрелки, значит момент этой силы положительный. Сила F2 стремится повернуть стержень по часовой стрелке, значит момент этой силы отрицательный.
Следовательно, выражения для работы сил F1 и F2 можно записать в таком виде: работа силы F1 равна произведению момента силы F1 на угол α; работа силы F2 равна произведению момента силы F2 на угол α.
Полная работа внешних сил складывается из работы сил F1, F2 и F3. Работа силы F3 равна нулю, потому что точка 0 не перемещается. Подставим в формулу вместо работы сил F1 и F2 произведения моментов сил на угол поворота. Получаем, что полная работа внешних сил равна произведению суммы моментов сил F1 и F2 на угол α.
Для того чтобы тело пришло в движение, нужно чтобы увеличилась его кинетическая энергия, а для этого внешние силы должны совершить работу.
Согласно полученному уравнению, работа внешних сил может быть отлична от нуля только в том случае, если сумма моментов этих сил не равна нулю. Если же суммарный момент внешних сил, действующих на тело, равен нулю, то их работа равна нулю. Следовательно, кинетическая энергия тела не увеличивается, то есть остается равной нулю. Значит, тело не приходит в движение.
Это есть второе условие, необходимое для равновесия твердого тела.
При равновесии твердого тела сумма моментов всех внешних сил, действующих на него относительно любой оси, равна нулю.
Если же на абсолютно твердое тело действует произвольное число сил, условия равновесия абсолютно твердого тела следующие:
‒ во-первых, геометрическая сумма внешних сил, действующих на тело, равна нулю,
‒ во-вторых, сумма моментов всех внешних сил, действующих на тело относительно любой оси, равна нулю.
Эти условия являются необходимыми и достаточными для равновесия твердого тела. Если они выполняются, то тело остается в равновесии.
Если же тело не является абсолютно твердым, даже при соблюдении двух условий равновесия, это тело может и не оставаться в равновесии.
Это происходит из-за того, что под воздействием приложенных к нему сил тело может деформироваться и тогда сумма всех сил, действующих на каждый его элемент, не будет равна нулю. Возьмем, например, резиновый шнур. Приложим к его концам две силы, равные по модулю и направленные вдоль шнура в противоположные стороны. Под действием этих сил шнур будет растягиваться, а, значит, выйдет из состояния равновесия, несмотря на то, что сумма внешних сил равна нулю и нулю равна сумма их моментов относительно оси, проходящей через любую точку шнура.
infourok.ru
Равновесие тел. Условия равновесия тел
Можно начинать решение от вопроса и продвигаться к заданным и принципиально известным величинам, а можно, независимо от заданных величин и вопроса, записать основное уравнение, описывающее состояние айсберга.
Пойдем по первому пути. Для этого запишем исходное уравнение для искомой величины и составим схему решения, предварительно пройдя через все его этапы, но не записывая формул.
Запишем искомую величину, поскольку с нее мы начинаем рассуждение.
Неизвестные величины будем в схеме обводить кружками, а при помощи отрезков будем указывать связи искомой величины с другими величинами.
Объем всего айсберга состоит из двух частей – надводной и подводной.
Объем надводной части известен, а объем подводной части – неизвестен, поэтому мы обведем его кружком.
У нас возникает другая задача. В море плавает айсберг. Как выразить объем подводной части айсберга?
Чтобы ответить на поставленный вопрос, следует вспомнить, что на тело, погруженное в жидкость или в газ, действует выталкивающая сила.
Выражение для выталкивающей силы содержит объем вытесненной телом жидкости, плотность жидкости и ускорение свободного падения g. В это выражение входит объем подводной части.
Плотность жидкости (в нашем случае, плотность морской воды) можно найти в справочнике.
Величина выталкивающей силы нам не известна, обведем ее кружком.
Плавающий айсберг находится в состоянии равновесия, поэтому выталкивающая сила, действующая на него, равна силе тяжести.
Сила тяжести, в свою очередь, связана с массой всего айсберга и ускорением свободного падения g, величина которого известна.
|
Рис. 1 |
Масса айсберга неизвестна, но ее можно выразить через плотность льда и объем айсберга.
Объем неизвестен, но далее продолжать построение схемы не следует, хотя мы и не пришли ко всем известным величинам, а вернулись к исходной величине. Схему, в данном случае, можно считать завершенной.
Далее вспомним уравнения, связывающие введенные величины, и запишем систему уравнений.
Объем всего айсберга равен сумме объемов его подводной и надводной частей: V = Vн + Vп.
Объем подводной части выражаем через архимедову силу, плотность жидкости и ускорение свободного падения:
Архимедову силу выражаем через силу тяжести: FА = Fт.
Силу тяжести выражаем через массу и ускорение свободного падения: Fт = mg.
Массу выражаем через плотность тела и объем: m = ρлV.
Полученная система из пяти уравнений решается обычными математическими способами.
Данную задачу можно решать и в другой последовательности. Нужно лишь определиться с типом задачи.
Вероятно, эта задача на равновесие.
Если это так, то первое уравнение, которое описывает состояние айсберга, отражает равенство сил Архимеда и тяжести.
Путем математических преобразований мы можем найти неизвестную величину:
files.school-collection.edu.ru