Тренажёр формул по физике (ОГЭ)
Пользоваться тренажёром предельно просто. Открой нужный раздел физики в списке разделов ниже. Ты увидишь описания формул из этого раздела.
Напиши эти формулы на листочке. Затем кликни на надпись «Кликни и проверь себя» и выясни, какие из формул ты еще плохо знаешь.
Подучи и повтори всё сначала.Успехов в изучении формул по физике, да и вообще физики!
I. Механические явления 1. Кинематика- Напиши формулы
- Кликни и проверь себя
- Напиши формулы
- Кликни и проверь себя
- Напиши формулы
- Кликни и проверь себя
- Напиши формулы
- Кликни и проверь себя
 Законы сохранения энергии и импульса
Законы сохранения энергии и импульса- Напиши формулы
- Кликни и проверь себя
- Напиши формулы
- Кликни и проверь себя
- Напиши формулы
- Кликни и проверь себя
- Напиши формулы
- Кликни и проверь себя
- Напиши формулы
- Кликни и проверь себя
- Напиши формулы
- Кликни и проверь себя
- Напиши формулы
- Кликни и проверь себя
 Переменный ток
Переменный ток- Напиши формулы
- Кликни и проверь себя
- Напиши формулы
- Кликни и проверь себя
- Напиши формулы
- Кликни и проверь себя
- Назад
Шпаргалки по физике (формулы)
Шпаргалка- формат doc
- размер 120.38 КБ
- добавлен 04 декабря 2010 г.
Площади.
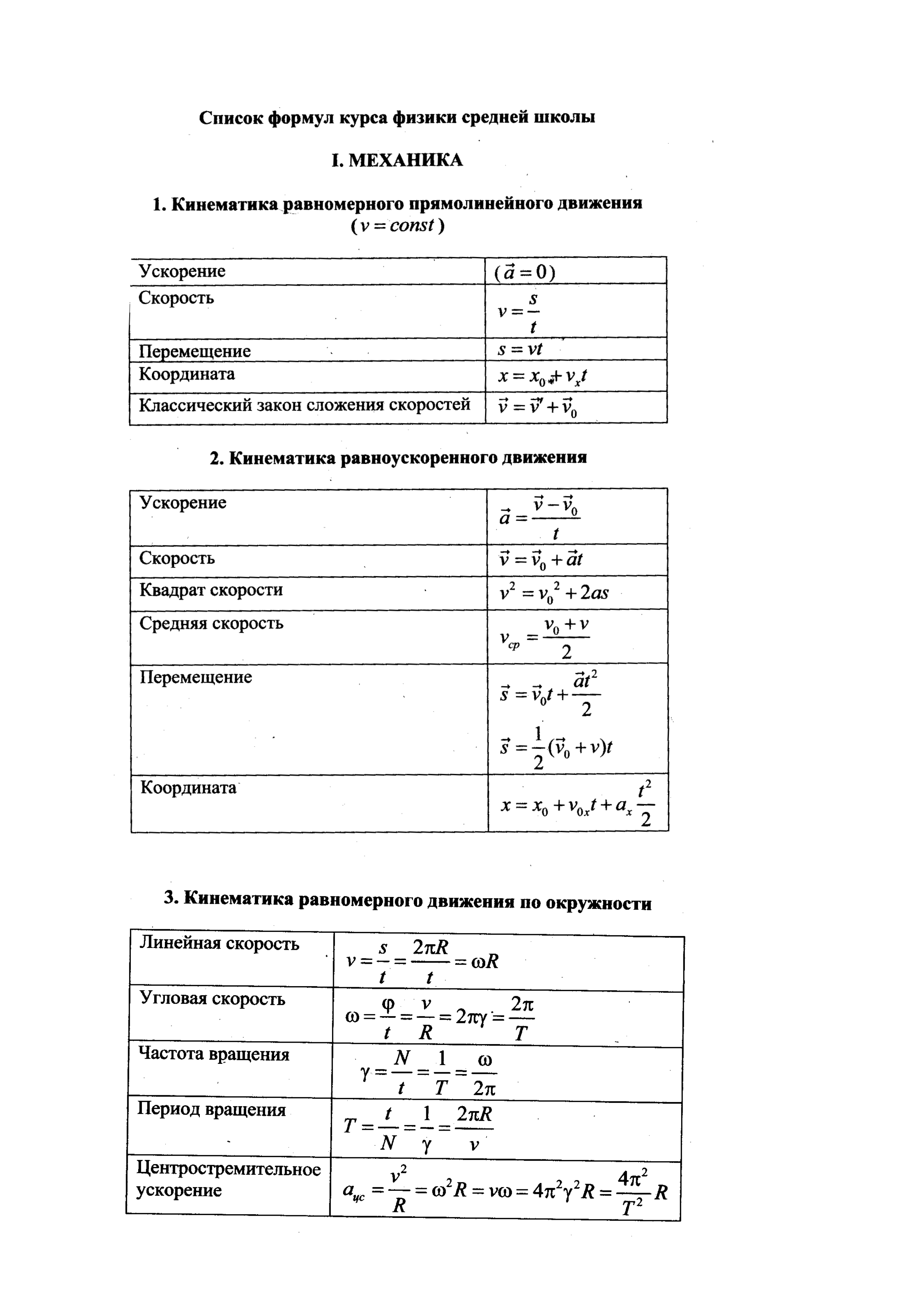
Кинематика.
Динамика.
Механика жидкостей и газов.
Колебания и волны. Звук.
Молекулярно-кинетическая теория.
Электричество и магнетизм.
Оптика.
Квантовая физика.
Похожие разделы
- Абитуриентам и школьникам
- ВНО / ЗНО
- ЗНО по физике
- Абитуриентам и школьникам
- ЕГЭ
- ЕГЭ по физике
- Абитуриентам и школьникам
- ОГЭ / ГИА / ДПА
- ОГЭ / ГИА / ДПА по физике
- Абитуриентам и школьникам
- Физика
- Академическая и специальная литература
- Механика
- Механика жидкостей и газов
- Академическая и специальная литература
- Педагогика
- Методики преподавания
- Методика преподавания физики
- Академическая и специальная литература
- Радиоэлектроника
- Антенная и СВЧ техника
- Электромагнитные поля и волны
- Академическая и специальная литература
- Радиоэлектроника
- Радиофизика
- Учебные планы, программы и нормативная документация
- Для средней школы
- Физика
- Учебные планы, программы и нормативная документация
- Физика
Смотрите также
Шпаргалка- формат pdf
- размер 1.
 58 МБ
58 МБ - добавлен 21 января 2012 г.
М.: РИОР, 2009. — 32 с. В шпаргалке приведены все основные формулы и определения по физике. Рекомендуется всем изучающим и сдающим физику в школах, средних и высших учебных заведениях.
Шпаргалка- формат jpg
- размер 149.22 КБ
- добавлен 14 января 2011 г.
Здесь представлены самые основные формулы, которые могут понадобиться студенту при сдачи экзамена по физике. Разделы: кинематика, динамика, электростатика, квантовая физика, ядерная физика и другие. Один этот самый лист.
software- формат exe
- размер 91.
 13 КБ
13 КБ - добавлен 12 июля 2010 г.
Программа, выводящая на экран формулы по физике. Бета-версия. Доступна только кинематика. NNSoft, 2006 г. Разработки для Pocket PC. Разделы: Кинематика; Динамика, Законы Сохранения; Статика, гидростатика; Мех. Колебания. Волны.; МКТ; термодинамика.rn
- формат pdf
- размер 1.95 МБ
- добавлен 06 октября 2011 г.
На 10 страницах приведены всё основные формулы по физике. Может пригодиться студенту при подготовке к экзамену, контрольной работе или просто для освежения памяти по следующим разделам: Кинематика. Динамика. Законы сохранения. Работа и мощность. Статика и гидростатика. Тепловые явления. Электростатика. Постоянный ток. Магнитные явления. Колебания и волны. Оптика.
- формат doc
- размер 128.54 КБ
- добавлен 30 октября 2011 г.
Выписки на 9 листах из книги «Краткий справочник по физике» Гридасов А.Ю. Новосибирск 1997 г. Файл содержит формулы из курса физики, которые будут полезны учащимся старших классов школ и младших курсов вузов. Все формулы изложены в компактном виде с небольшими комментариями. Файл также содержит полезные константы и прочую информацию.
Шпаргалка- формат doc
- размер 136.87 КБ
- добавлен 24 января 2009 г.
Формулы по курсу физики: Механике, молекулярной физике и термодинамике, электричеству и магнетизму, колебаниям и волнам, оптике, квантовой природе излучения, элементам квантовой физики атомов, молекул и твёрдых тел, элементам физики атомного ядра и элементарных частиц.
- формат jpg
- размер 1.15 МБ
- добавлен 27 мая 2009 г.
Формулы — Шпоры по физике сделаны специально для мобильного телефона или графического калькулятора. (калькулятор должен иметь флешь память и читать jpg формат) Есть формулы по: Кинематике. Динамике. Законах сохранения энергии. Механика жидкостей. Основах МКТ. Термодинамике. Колебаниях и волнах. Электростатике. Постоянном электрическом токе. Индукции. Электромагнитным колебаниям. Оптике. Ядерным реакциям. Квантовой физике. Основам СТО.rn
- формат docx
- размер 97.99 КБ
- добавлен 07 декабря 2009 г.
Все школьные формулы по механике, молекулярной физике, термодинамике, электродинамике, оптике, квантовой физике и т. д.
д.
- формат doc
- размер 2.24 МБ
- добавлен 22 февраля 2011 г.
Полный сборник по физике, включающий в себя основные формулы, законы и определения. Данный сборник(глоссарий предназначен для студентов технического факультета). Рассмотрены следующие темы: Механика. Динамика. Молекулярный физика и термодинамика. Электричество и магнетизм. Оптика.
- формат jpg, htm
- размер 17.33 МБ
- добавлен 22 октября 2009 г.
Шпоры по Физике. Буквы, используемые для обозначения величин Методика решения задач по физике Векторы Основные положения, законы и формулы Механика Кинематика Динамика Статика Простые механизмы Жидкости и газы Молекулярная физика Термодинамика Электростатика Электричество Магнитное поле Колебания и волны Оптика Элементы теории относительности Квантовая физика Атомная и ядерная физика Приложения Шкала электромагнитных волн. ..
..
Динамика: примеры, значение, типы и силы
Как объекты, которые мы видим в повседневной жизни, движутся так, как они это делают? Например, вы смотрели в небо и удивлялись, как легко летают самолеты и птицы? Или, возможно, подумали, почему мяч, брошенный с одного конца футбольного поля на другой, движется по криволинейной траектории. Область динамики в физике исследует эти ситуации и объяснит нам ответы на эти вопросы в терминах векторов и математических уравнений. Силы ответственны за каждое изменение в движении, и принципы динамики помогают нам понять, как именно это происходит.
Чтобы понять динамику, нам нужно понять, что такое сила и законы движения. Мы обсудим их ниже, а также диаграммы свободного тела и то, как их использовать с законами Ньютона для решения динамических задач.
Динамика и силы
Прежде чем мы углубимся в законы движения Ньютона и диаграммы свободного тела, давайте рассмотрим некоторые важные знания о динамике и силах, чтобы построить прочную основу.
Динамика и определение сил
Как мы упоминали ранее, динамика — это изучение движения объектов, которые мы видим вокруг себя. Мы можем конкретно определить его следующим образом.
Динамика — это изучение взаимосвязи между силами и движением тел.
Сила — это толчок или притяжение, вызванные взаимодействием между двумя или более объектами, которые могут вызвать изменение движения взаимодействующих объектов.
Пример силы, действующей на вас, это когда ваш друг толкает вас, когда вы сидите на качелях. Эта толкающая сила в сочетании с натяжением струны между сиденьем и перекладиной создает вращательную силу, которая позволяет вам раскачиваться вперед и назад. С другой стороны, примером силы тяги может быть ситуация, когда вы идете вверх по заснеженной горе и тянете сани за собой. Потянув за веревку, прикрепленную к салазкам, вы воздействуете на салазки, чтобы они работали против силы тяжести.
Объект не может воздействовать на себя; сила требует наличия по крайней мере двух объектов (включая такие вещи, как поверхности и жидкости).
Есть много различных типов сил. Приведенные выше примеры представляют собой приложенных сил , возникающих в результате приложения кем-то или чем-то внешней силы к объекту. Контактные силы возникают в результате соприкосновения объектов: например, сила трения, сила пружины, выталкивающая сила, сила сопротивления и нормальная сила. Дальних сил тоже — , где взаимодействующие объекты не должны соприкасаться, чтобы воздействовать на них силами, такими как гравитационные, электрические и магнитные силы. На изображении ниже показаны эти силы.
Рис. 2. Воздушный шар, парящий в небе, является примером восходящей выталкивающей силы, поскольку газообразный гелий в воздушном шаре легче окружающего воздуха.
Динамическое равновесие Определение
Каждый раз, когда объект начинает двигаться, останавливается, замедляется, ускоряется или меняет направление, сила вызывает изменение. Эти изменения являются примерами ускорение. Следовательно, всякий раз, когда объект меняет ускорение, мы знаем, что что-то приложило к нему силу.
Следовательно, всякий раз, когда объект меняет ускорение, мы знаем, что что-то приложило к нему силу.
Силы являются векторами, то есть имеют величину и направление . Таким образом, они определяют, насколько сильно притягивается объект и как он движется. Величина и направление силы напрямую связаны с величиной и направлением результирующего изменения ускорения. Силы также могут действовать в противовес друг другу и эффективно компенсировать друг друга, поэтому, даже если объект не движется, на него все равно действуют силы. 92}}\), если на него не действуют никакие другие силы, мы приложим к весу \(1\,\mathrm{N}\) силу в направлении нашего толчка.
Термин «динамический» подразумевает движение. Следовательно, динамическое равновесие относится к чему-то, что движется, но все еще находится в равновесии. Как это работает? Как может что-то двигаться и при этом находиться в равновесии? Ответ лежит в силе и ускорении.
Когда объект находится в динамическом равновесии , этот объект не ускоряется и на него действует нулевая результирующая сила.
Например, при отсутствии каких-либо внешних сил удар по мячу ногой заставит его ускориться. Однако, как только этот мяч покинет вашу ногу, на нее не будут действовать никакие чистые силы. Поскольку для ускорения объекта требуется ненулевая результирующая сила, этот мяч будет находиться в динамическом равновесии; он будет продолжать двигаться, но с постоянной скоростью: без ускорения.
Другой пример — объекты, падающие с предельной скоростью. Сначала, когда парашютисты выпрыгивают из самолета, они быстро ускоряются. Однако по мере того, как сила сопротивления воздуха нарастает и нарастает, их ускорение уменьшается до тех пор, пока сила тяжести не сравняется с силой сопротивления воздуха, действующего на них вверх. Это приводит к тому, что чистые силы, действующие на них, уравновешиваются. Следовательно, они перестают ускоряться, имеют постоянную скорость и находятся в динамическом равновесии.
Уравнения силы
Сила трения, сила пружины и гравитационная сила имеют уравнения, которые мы можем использовать для их расчета. Однако, чтобы найти любую из других сил, имеющих отношение к AP Physics 1 (натяжение и нормальные силы), мы должны использовать другие силы, действующие на объект, для их решения. Для этого мы используем законы движения Ньютона и диаграммы свободного тела, которые будут обсуждаться в следующих разделах.
Однако, чтобы найти любую из других сил, имеющих отношение к AP Physics 1 (натяжение и нормальные силы), мы должны использовать другие силы, действующие на объект, для их решения. Для этого мы используем законы движения Ньютона и диаграммы свободного тела, которые будут обсуждаться в следующих разделах.
Мы рассчитываем силу трения, используя уравнение
\[ F_{\text{f}} = \mu F_{\text{N}} ,\]
где \( F_{\text{f}}\) — сила трения, измеряемая в ньютонах \(\ mathrm{N}\), \(\mu\) — коэффициент трения, а \(F_{\text{N}}\) — нормальная сила, измеряемая в ньютонах \(\mathrm{N}\) . Важно отметить, что коэффициент трения \(\mu\) безразмерен и уникален для материала каждой поверхности. Нормальная сила между объектом и поверхностью — это составляющая веса объекта, перпендикулярная поверхности.
Кроме того, мы также можем определить уравнение силы пружины как
\[ F_{\text{s}} = k x ,\]
где \(F_{\text{s}}\) — измеренная сила пружины в ньютонах \(\mathrm{N}\), \(k\) — жесткость пружины, измеренная в единицах \(\mathrm{\frac{N}{m}}\), а \(x\ ) представляет собой смещение пружины из положения покоя, измеренное в метрах \(\mathrm{m}\). Этот закон также называется законом Гука и показывает, что сила пружины пропорциональна смещению пружины. Важно отметить, что пружина может быть как сжата, так и растянута, поэтому вектор смещения \(x\) может принимать как положительные, так и отрицательные значения. 92}}\).
Этот закон также называется законом Гука и показывает, что сила пружины пропорциональна смещению пружины. Важно отметить, что пружина может быть как сжата, так и растянута, поэтому вектор смещения \(x\) может принимать как положительные, так и отрицательные значения. 92}}\).
Важно помнить, что масса — это не то же самое, что вес. Масса измеряется в \(\mathrm{килограммах}\) и не меняется в зависимости от местоположения, тогда как вес представляет собой силу (измеряемую в \(\mathrm{ньютонах}\)) и равную массе, умноженной на гравитацию, то есть она изменяется в зависимости в гравитационном поле, в котором он находится.
Законы движения Ньютона
Законы движения Ньютона объясняют взаимосвязь между движением объекта и силами, действующими на него. Три закона движения Ньютона таковы:
Первый закон движения Ньютона — Объекты остаются в состоянии покоя или с постоянной скоростью, если на них не действует чистая внешняя сила.
Второй закон Ньютона движения — Ускорение объекта зависит от количества его массы и количества приложенной силы.
 Этот закон движения приводит к уравнению \(\sum\vec{F}=m\vec{a}\).
Этот закон движения приводит к уравнению \(\sum\vec{F}=m\vec{a}\).Третий закон Ньютона движения — Если объект воздействует на второй объект, то второй объект оказывает на первый объект силу равной величины и противоположного направления.
Диаграммы свободного тела
Для представления внешних сил, действующих на объект, мы рисуем диаграммы свободного тела . Диаграммы свободного тела позволяют нам визуализировать силы, действующие на объект, что помогает нам писать уравнения, представляющие физическую ситуацию. Мы рисуем стрелки, представляющие силы в направлении этих сил, с длинами, обычно относящимися к силе сил. Изображение ниже является примером диаграммы свободного тела.
Рис. 3 — Схема свободного тела.
На объект на изображении действуют четыре силы: нормальная сила \(F_\mathrm{n}\), действующая вверх, сила тяжести \(F_g\), действующая вниз, сила трения \(F_\mathrm{ f}\), действующая влево, и сила натяжения \(T\), действующая вправо.
При рисовании диаграмм свободного тела помните, что гравитационная сила действует прямо вниз, а нормальная сила всегда действует перпендикулярно от поверхности.
Мы можем выбрать, какой объект или группу объектов (называемых система ), чтобы проанализировать, на основе какой информации мы хотим получить. Если мы выбираем систему для анализа, мы можем сгруппировать ее в одну и ту же диаграмму свободного тела и действовать так, как будто группа — это один объект.
Гидродинамика
Мы рассмотрели область динамики в общем смысле, но более конкретным изучением динамики является область гидродинамики. В этой области мы специально рассматриваем динамику жидкостей и газов. Например, гидродинамика позволила бы нам объяснить подъемную силу, которую испытывает самолет из-за потока воздуха под его крыльями. Это также важная основа для изучения физики атмосферы и того, как разные ветры влияют на погоду по всему миру. Гидродинамика — гораздо более продвинутая область исследования, чем то, что рассматривается в AP 1, и она начнет внедряться в университетскую физику. 92}\). Это уравнение означает, что векторная сумма сил (также известная как чистая или результирующая сила ), действующих на объект, равна его массе, умноженной на его ускорение.
92}\). Это уравнение означает, что векторная сумма сил (также известная как чистая или результирующая сила ), действующих на объект, равна его массе, умноженной на его ускорение.
Сила и ускорение являются векторами, на что указывают стрелки над переменными. Направление чистой силы определяет направление ускорения объекта; это означает, что мы можем использовать уравнение только для отдельных направлений (например, сумма сил в направлении \(x\) равна массе объекта, умноженной на ускорение только в направлении \(x\)). Мы можем использовать принцип суперпозиции сил складывать силы в виде векторов или разбивать диагональную силу на компоненты \(x\) и \(y\).
Направление силы совпадает с направлением ускорения, но это не означает, что направление силы совпадает с направлением скорости. Так, например, если объект, движущийся в настоящее время вправо, толкается влево, результирующее ускорение действует влево, но объект может продолжать двигаться вправо с меньшей скоростью. 9\circ\) и коэффициент трения \(0,20\), каково ускорение коробки?
9\circ\) и коэффициент трения \(0,20\), каково ускорение коробки?
Во-первых, мы хотим нарисовать диаграмму свободного тела для сценария, как показано ниже:
Рис. 4. Пример задачи диаграммы свободного тела действующая против скольжения, и гравитационная сила, действующая прямо вниз. Поскольку большая часть сил действует на ось, соответствующую поверхности, мы выбрали систему координат, в которой \(x\) параллельна поверхности, а y перпендикулярна поверхности, как показано. Поскольку в этой системе координат гравитационная сила действует по диагонали, мы хотим определить компоненты силы \(x\) и \(y\), показанные красным цветом. Мы будем использовать тригонометрию, чтобы найти эти компоненты силы (\(F_{gx}=F_g\sin\theta\) и \(F_{gy}=F_g\cos\theta\)).
Чтобы найти ускорение ящика, мы можем написать уравнение второго закона Ньютона в направлении \(x\):
$$-F_\mathrm{f}+F_{gx}=ma_x\mathrm{.} $$
Чтобы найти трение, воспользуемся уравнением трения. Поскольку мы знаем, что коробка скользит, мы знаем, что трение равно произведению коэффициента трения на нормальную силу:
$$|F_\mathrm{f}|=\mu|F_\mathrm{n}|\mathrm{. }$$
}$$
Чтобы узнать нормальную силу, нам нужно посмотреть на силы в \(y\)-направлении. Так как ящик не ускоряется в \(y\)-направлении, сумма сил равна нулю
$$F_\mathrm{n}-F_{gy}=0\mathrm{.}$$
Теперь переставьте, чтобы найти нормальную силу, и подставьте \(mg\cos\theta\) вместо \(F_ {gy}\)
$$F_\mathrm{n}=mg\cos\theta\mathrm{;}$$
подставляя это в уравнение трения, получаем
$$F_\mathrm{f}=\mu \,mg\cos\theta\mathrm{.}$$
Мы можем подставить это в наше первое уравнение и заменить \(mg\sin\theta\) на \(F_{gx}\)
$$- (\mu\,mg\cos\theta)+mg\sin\theta=ma$$
и переформулируем наше уравнение, чтобы найти ускорение, разделив все на массу 92}\).
Вот оно! Теперь вы знаете, почему предметы движутся именно так, а не иначе и как объекты воздействуют на другие объекты. У вас есть все основания, чтобы стать волшебником физики!
Динамика — основные выводы
- Динамика — это изучение взаимосвязи между силой и движением.

- Сила — это толчок или притяжение, вызванное взаимодействием между двумя или более объектами.
- Силы являются векторами, то есть имеют величину и направление.
- Силы вызывают изменения ускорения. Направление чистой силы определяет направление ускорения.
- Силы трения, пружины и гравитации рассчитываются по специальным уравнениям; напряжение и нормальная сила не делают.
- Диаграммы свободного тела используются для визуализации сил, действующих на объект.
- Мы используем диаграммы свободного тела и законы движения Ньютона для решения задач силы и ускорения.
Каталожные номера
- Рис. 1 — Самолет, Wikimedia Commons (https://commons.wikimedia.org/wiki/File:Finnair.a320-200.oh-lxf.arp.jpg) Лицензия Public Domain.
- Рис. 2. Воздушный шар, Wikimedia Commons (https://commons.wikimedia.org/wiki/File:Hot_air_balloon_and_moon.jpg) Лицензия CC BY-SA 3.0 (https://creativecommons.org/licenses/by -sa/3.
 0/)
0/) - Рис. 3 — Схема свободного тела, StudySmarter Originals.
- Рис. 4 — Пример динамической диаграммы свободного тела, StudySmarter Originals.
Уравнения движения – Гиперучебник по физике
постоянное ускорение
Для точности этот раздел следует назвать «Одномерные уравнения движения при постоянном ускорении». Учитывая, что такое название было бы стилистическим кошмаром, позвольте мне начать этот раздел со следующей оговорки. Эти уравнения движения действительны только тогда, когда ускорение постоянно, а движение ограничено прямой линией.
Учитывая, что мы живем в трехмерной вселенной, в которой единственной константой являются изменения, у вас может возникнуть соблазн сразу пропустить этот раздел. Было бы правильно сказать, что ни один объект никогда не двигался по прямой с постоянным ускорением где-либо во Вселенной в любое время — ни сегодня, ни вчера, ни завтра, ни пять миллиардов лет назад, ни тридцать миллиардов лет в будущем. , никогда. Это я могу сказать с абсолютной метафизической уверенностью.
, никогда. Это я могу сказать с абсолютной метафизической уверенностью.
Так что же хорошего в этом разделе? Что ж, во многих случаях полезно предположить, что объект двигался или будет двигаться по траектории, которая в основном является прямой, и с почти постоянным ускорением; то есть любое отклонение от идеального движения можно по существу игнорировать. Движение по криволинейной траектории можно считать эффективно одномерным, если имеется только одна степень свободы для задействованных объектов. Дорога может извиваться и поворачивать, исследовать всевозможные направления, но автомобили, движущиеся по ней, имеют только одну степень свободы — свободу двигаться в одном направлении или в противоположном направлении. (Вы не можете ехать по дороге по диагонали и надеяться, что продержитесь на ней долго.) В этом отношении это мало чем отличается от движения, ограниченного прямой линией. Аппроксимация реальных ситуаций моделями, основанными на идеальных ситуациях, не считается мошенничеством.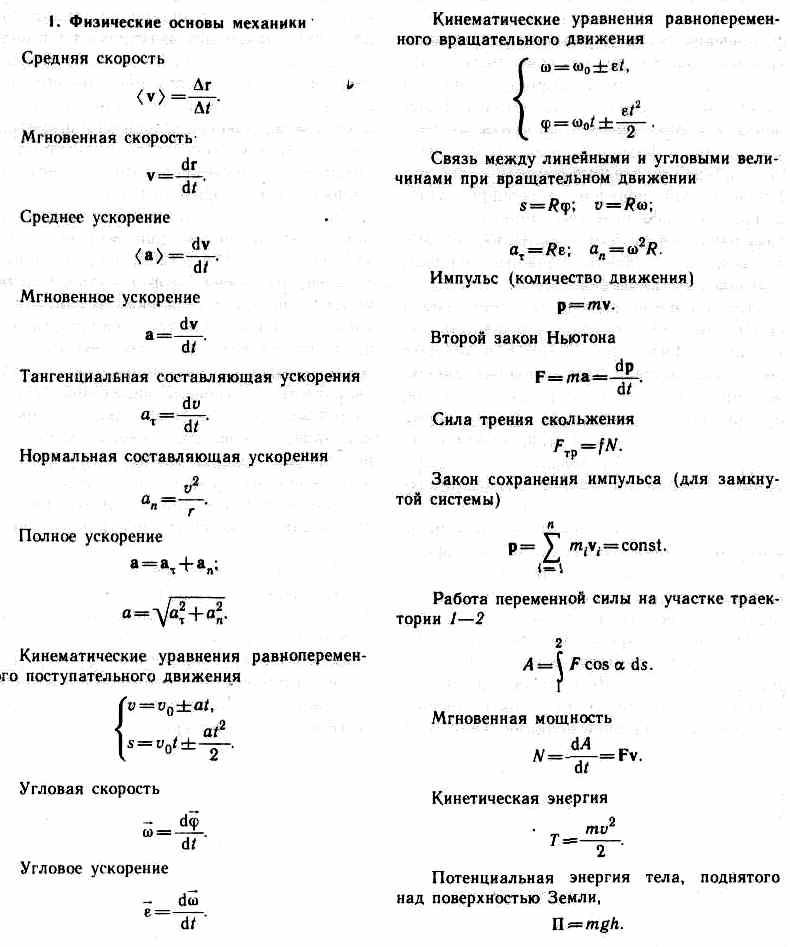 Так дела обстоят в физике. Это настолько полезный метод, что мы будем использовать его снова и снова.
Так дела обстоят в физике. Это настолько полезный метод, что мы будем использовать его снова и снова.
Наша цель в этом разделе состоит в том, чтобы вывести новые уравнения, которые можно использовать для описания движения объекта с точки зрения его трех кинематических переменных: скорости ( v ), положения ( с ) и времени ( т ). Есть три способа их объединения: скорость-время, положение-время и скорость-положение. В таком порядке их также часто называют первым, вторым и третьим уравнениями движения, но нет веских причин учить эти названия.
Поскольку мы имеем дело с прямолинейным движением, направление будет обозначаться знаком — положительные величины указывают в одну сторону, а отрицательные — в противоположную. Определение того, какое направление является положительным, а какое отрицательным, совершенно произвольно. Законов физики изотропный ; то есть они не зависят от ориентации системы координат. Однако некоторые проблемы легче понять и решить, когда одно направление предпочтительнее другого. Пока вы последовательны в решении проблемы, это не имеет значения.
Пока вы последовательны в решении проблемы, это не имеет значения.
скорость-время
Связь между скоростью и временем является простой при равноускоренном прямолинейном движении. Чем дольше ускорение, тем больше изменение скорости. Изменение скорости прямо пропорционально времени, если ускорение постоянно. Если скорость увеличивается на определенную величину за определенное время, она должна увеличиться в два раза на эту величину за удвоенное время. Если объект уже стартовал с определенной скоростью, то его новая скорость будет равна старой скорости плюс это изменение. Вы уже должны уметь видеть уравнение мысленным взором.
Это самое простое из трех уравнений, которое можно вывести с помощью алгебры. Начните с определения ускорения.
| и = | ∆ v |
| ∆ т |
Развернуть ∆ v до v − v 0 и сжать ∆ t до t .
| и = | v − v 0 |
| т |
Затем найдите v как функцию t .
v = v 0 + в [1]
Это первое уравнение движения . Он записывается как полином — постоянный член ( v 0 ), за которым следует член первого порядка ( на ). Поскольку старший порядок равен 1, правильнее называть его линейным 9.0239 функция.
Символ v 0 [vee nought] называется начальной скоростью или скоростью a time t = 0. Ее часто считают «первой скоростью», но это довольно наивный способ Опишите это. Лучшим определением было бы сказать, что начальная скорость — это скорость, которую имеет движущийся объект, когда он впервые становится важным в задаче. Скажем, метеор был замечен глубоко в космосе, и задача состояла в том, чтобы определить его траекторию, тогда начальная скорость, вероятно, была бы скоростью, которую он имел при первом наблюдении. Но если проблема заключалась в том, что тот же самый метеор сгорает при входе в атмосферу, то начальная скорость, вероятно, будет равна скорости, с которой он вошел в атмосферу Земли. Ответ на вопрос «Какова начальная скорость?» это «это зависит». Оказывается, это ответ на многие вопросы.
Но если проблема заключалась в том, что тот же самый метеор сгорает при входе в атмосферу, то начальная скорость, вероятно, будет равна скорости, с которой он вошел в атмосферу Земли. Ответ на вопрос «Какова начальная скорость?» это «это зависит». Оказывается, это ответ на многие вопросы.
Символ v — это скорость через некоторое время t после начальной скорости. Ее часто называют конечной скоростью , но это не делает ее «последней скоростью» объекта. Возьмем случай с метеором. Какая скорость представлена символом v ? Если вы были внимательны, то должны были предвидеть ответ. Это зависит. Это может быть скорость метеора при прохождении мимо Луны, при входе в атмосферу Земли или при ударе о поверхность Земли. Это также может быть скорость метеорита, когда он находится на дне кратера. (в этом случае v = 0 м/с.) Любая из них является конечной скоростью? Кто знает. Кто-то мог извлечь метеорит из отверстия в земле и увезти его с собой. Это актуально? Вероятно, нет, но это зависит. Для такого рода вещей нет правил. Вы должны разобрать текст задачи на наличие физических величин, а затем присвоить значение математическим символам.
Это актуально? Вероятно, нет, но это зависит. Для такого рода вещей нет правил. Вы должны разобрать текст задачи на наличие физических величин, а затем присвоить значение математическим символам.
Последняя часть этого уравнения по представляет собой изменение скорости по сравнению с начальным значением. Напомним, что a — это скорость изменения скорости и что t — это время после некоторого начального события . Скорость раз время меняется. Если объект движется с ускорением 10 м/с 2 , через 5 с он будет двигаться на 50 м/с быстрее. Если бы он стартовал со скоростью 15 м/с, то его скорость через 5 с была бы…
15 м/с + 50 м/с = 65 м/с
позиция-время
Перемещение движущегося объекта прямо пропорционально скорости и времени. Двигайся быстрее. Иди дальше. Двигайтесь дольше (как в более длительное время). Иди дальше. Ускорение усложняет эту простую ситуацию, поскольку теперь скорость также прямо пропорциональна времени. Попробуйте сказать это словами, и это прозвучит смешно. «Перемещение прямо пропорционально времени и прямо пропорционально скорости, которая прямо пропорциональна времени». Время является двойным фактором, что делает смещение пропорциональным квадрату времени. Автомобиль, ускоряющийся в течение двух секунд, преодолеет в четыре раза большее расстояние, чем автомобиль, ускоряющийся всего за одну секунду (2, 2 = 4). Автомобиль, ускоряющийся в течение трех секунд, преодолеет в девять раз большее расстояние (3 2 = 9).
Попробуйте сказать это словами, и это прозвучит смешно. «Перемещение прямо пропорционально времени и прямо пропорционально скорости, которая прямо пропорциональна времени». Время является двойным фактором, что делает смещение пропорциональным квадрату времени. Автомобиль, ускоряющийся в течение двух секунд, преодолеет в четыре раза большее расстояние, чем автомобиль, ускоряющийся всего за одну секунду (2, 2 = 4). Автомобиль, ускоряющийся в течение трех секунд, преодолеет в девять раз большее расстояние (3 2 = 9).
Если бы это было так просто. Этот пример работает только тогда, когда начальная скорость равна нулю. Перемещение пропорционально квадрату времени, когда ускорение постоянно, а начальная скорость равна нулю. Правильное общее утверждение должно было бы учитывать любую начальную скорость и то, как скорость изменялась. Это приводит к ужасно беспорядочному заявлению о пропорциональности. Смещение прямо пропорционально времени и пропорционально квадрату времени при постоянном ускорении.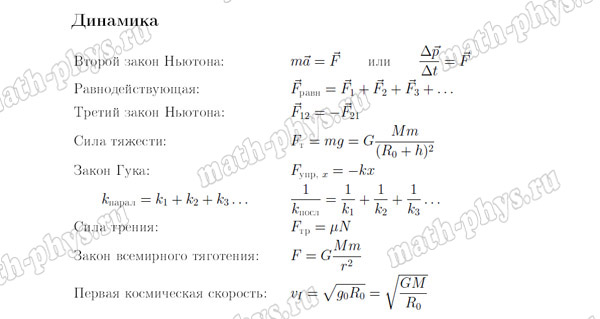 Говорят, что функция, которая является одновременно линейной и квадратичной, равна 9.0238 квадратичный , что позволяет значительно сжать предыдущее утверждение. Перемещение является квадратичной функцией времени при постоянном ускорении
Говорят, что функция, которая является одновременно линейной и квадратичной, равна 9.0238 квадратичный , что позволяет значительно сжать предыдущее утверждение. Перемещение является квадратичной функцией времени при постоянном ускорении
Заявления о пропорциональности полезны, но не так универсальны, как уравнения. Мы до сих пор не знаем, каковы константы пропорциональности для этой задачи. Один из способов выяснить их — использовать алгебру.
Начните с определения средней скорости.
| v = | ∆ с |
| ∆ т |
Расширить ∆ s до s − s 0 и сжать ∆ t до t .
| v = | с — с 0 |
| т |
Решите для положения.
с = с 0 + вт [а]
Чтобы продолжить, нам нужно прибегнуть к небольшому трюку, известному как теорема о средней скорости или правило Мертона . Я предпочитаю последнее, поскольку это правило можно применить к любой величине, изменяющейся с одинаковой скоростью, а не только к скорости. Правило Мертона было впервые опубликовано в 1335 году в Мертон-колледже в Оксфорде английским философом, математиком, логиком и вычислителем Уильямом Хейтсбери (1313–1372). Когда скорость изменения величины постоянна, ее среднее значение находится посередине между конечным и начальным значениями.
Я предпочитаю последнее, поскольку это правило можно применить к любой величине, изменяющейся с одинаковой скоростью, а не только к скорости. Правило Мертона было впервые опубликовано в 1335 году в Мертон-колледже в Оксфорде английским философом, математиком, логиком и вычислителем Уильямом Хейтсбери (1313–1372). Когда скорость изменения величины постоянна, ее среднее значение находится посередине между конечным и начальным значениями.
v = ½( v + v 0 ) [4]
Подставьте первое уравнение движения [1] в это уравнение [4] и упростите, чтобы исключить v .
| v = ½[( v 0 + на ) + v 0 ] 9000 2 v = ½(2 v 0 + в ) v = v 0 + ½ в [б] |
Теперь замените [b] на [a], чтобы исключить v [клиновидная черта].
s = s 0 + ( v 0 + ½ в ) t 90 005
И, наконец, найдите s как функцию t .
s = s 0 + v 0 t + ½ в 2 [2]
Это второе уравнение движения . Он записывается как многочлен — постоянный член ( s 0 ), за которым следует член первого порядка ( v 0 t ), за которым следует член второго порядка (½ в 9037 1 2 ). Поскольку высший порядок равен 2, правильнее называть его квадратичным .
Символ s 0 [эсс ноль] часто рассматривается как начальная позиция . Символ s — это позиция через некоторое время t . Вы можете назвать это конечной позицией , если хотите. Изменение положения (∆ s ) называется перемещением или расстоянием (в зависимости от обстоятельств), и некоторые люди предпочитают писать второе уравнение движения так.
∆ s = v 0 t + ½ в 2 [2]
скорость-позиция
Первые два уравнения движения описывают одну кинематическую переменную как функцию времени. По сути…
По сути…
- Скорость прямо пропорциональна времени при постоянном ускорении ( v ∝ t ).
- Перемещение пропорционально квадрату времени при постоянном ускорении (∆ с ∝ t 2 ).
Объединение этих двух утверждений приводит к третьему — тому, что не зависит от времени. Подстановкой должно быть очевидно, что…
- Перемещение пропорционально квадрату скорости при постоянном ускорении (∆ с ∝ v 2 ).
Это утверждение особенно важно для безопасности вождения. Когда вы удваиваете скорость автомобиля, вам потребуется в четыре раза больше расстояния, чтобы его остановить. Утройте скорость, и вам понадобится в девять раз больше расстояния. Это хорошее практическое правило, которое следует запомнить.
Концептуальное введение завершено. Пришло время вывести формальное уравнение.
метод 1
Объедините первые два уравнения вместе таким образом, чтобы исключить время как переменную. Самый простой способ сделать это — начать с первого уравнения движения…
Самый простой способ сделать это — начать с первого уравнения движения…
v = v 0 + в [1]
решить на время…
| т = | v − v 0 |
| и |
и подставляем во второе уравнение движения…
s = s 0 + v 0 t + ½ в 2 [2]
вот так…
| с = | с 0 + v 0 | ⎛ ⎜ ⎝ | v − v 0 | ⎞ ⎟ ⎠ | + ½ и | ⎛ ⎜ ⎝ | v − v 0 | ⎞ 2 ⎟ ⎠ |
| и | и |
| с — с 0 = | вв 0 — в 0 2 | + | v 2 − 2 vv 0 + v 0 2 |
| и | 2 а |
| 2 a ( s − s 0 ) = 2( vv 0 — v 0 2 ) + ( v 2 — 2 vv 0 + v 0 2 ) | |
| 2 а ( с — s 0 ) = v 2 — v 0 2 | |
Сделайте квадрат скорости объекта, и все готово.
v 2 = v 0 2 + 2 a ( s — с 0 ) [3]
Это третье уравнение движения . И снова символ s 0 [ess nought] – начальная позиция , а s – позиция через какое-то время от до . Если вы предпочитаете, вы можете написать уравнение, используя ∆ s — изменение положения , смещение или расстояние в зависимости от ситуации.
v 2 = v 0 2 + 2 a ∆ s [3] 90 005
метод 2
Более сложный способ вывести это уравнение — начать со второго уравнения движения в такой форме…
∆ s = v 0 t + ½ в 2 [2]
и решить его на время. Это непростая задача, так как уравнение квадратное. Переставьте термины вот так…
½ в 2 + v 0 t − ∆ s = 0
и сравните его с общей формой квадратного числа.
ax 2 + bx + c = 0
Решения этого уравнения дает знаменитое уравнение…
| x = | − b ± √( b 2 − 4 ac ) 9026 4 |
| 2 а |
Замените символы в общем уравнении эквивалентными символами из нашего перестроенного второго уравнения движения…
| т = | − v 0 ± √[ v 0 2 — 4(½ a )(-∆ с )] |
| 2(½ и ) |
немного почистить…
| т = | − v 0 ± √( v 0 2 + 2 a ∆ s ) |
| и |
, а затем подставьте его обратно в первое уравнение движения.
v = v 0 + в [1]
| v = v 0 + a | ⎛ ⎜ ⎝ | − v 0 ± √( v 0 2 + 2 a ∆ s ) | ⎞ ⎟ ⎠ |
| и |
Вещи отменяются, и мы получаем это…
v = ±√( v 0 2 + 2 a ∆ s )
Подровняйте обе стороны и готово.
v 2 = v 0 2 + 2 a ∆ s [3] 90 005
Теперь это было не так уж плохо, не так ли?
вывод исчисления
Исчисление — сложная математическая тема, но оно значительно упрощает вывод двух из трех уравнений движения. По определению ускорение есть первая производная скорости по времени. Возьмите операцию в этом определении и отмените ее. Вместо того, чтобы дифференцировать скорость, чтобы найти ускорение, интегрируйте ускорение, чтобы найти скорость. Это дает нам уравнение скорость-время. Если предположить, что ускорение постоянно, мы получим так называемое первое уравнение движения [1].
| и | = | ||||||||||||||
| дв | = | а дт | |||||||||||||
| = |
| |||||||||||||
| v — v 0 | = | по телефону | |||||||||||||
| против | = | v 0 + в [1] | |||||||||||||
Опять же, по определению, скорость — это первая производная положения по времени. Отменить эту операцию. Вместо того, чтобы дифференцировать положение, чтобы найти скорость, интегрируйте скорость, чтобы найти положение. Это дает нам уравнение положение-время для постоянного ускорения, также известное как уравнение движения секунд [2].
Отменить эту операцию. Вместо того, чтобы дифференцировать положение, чтобы найти скорость, интегрируйте скорость, чтобы найти положение. Это дает нам уравнение положение-время для постоянного ускорения, также известное как уравнение движения секунд [2].
| против | = | |||||||||||||||
| дс | = | в дт | ||||||||||||||
| дс | = | ( v 0 + в ) dt | ||||||||||||||
| = |
| ||||||||||||||
| с — с 0 | = | v 0 t + ½ в 2 | ||||||||||||||
| с | = | s 0 + v 0 t + ½ в 2 [2] 9026 4 | ||||||||||||||
В отличие от первого и второго уравнений движения, нет очевидного способа вывести третье уравнение движения (которое связывает скорость с положением) с помощью вычислений. Мы не можем просто реконструировать это из определения. Нам нужно сыграть довольно изощренный трюк.
Мы не можем просто реконструировать это из определения. Нам нужно сыграть довольно изощренный трюк.
Первое уравнение движения связывает скорость со временем. По сути, мы вывели его из этой производной…
| дв | = a |
| дт |
Второе уравнение движения связывает положение со временем. Это произошло от этой производной…
| дс | = против |
| дт |
Третье уравнение движения связывает скорость с положением. По логике это должно происходить от производной, которая выглядит так…
| дв | = ? |
| дс |
Но чему это равно? Ну ничего по определению, но, как и все величины, оно равно самому себе. Это также равно самому себе, умноженному на 1. Мы будем использовать специальную версию 1 ( dt dt ) и специальную версию алгебры (алгебра с бесконечно малыми). Посмотрите, что происходит, когда мы это делаем. Получаем одну производную, равную ускорению ( DV DT ) и еще одна производная, равная обратной скорости ( DT DS ).
Посмотрите, что происходит, когда мы это делаем. Получаем одну производную, равную ускорению ( DV DT ) и еще одна производная, равная обратной скорости ( DT DS ).
| дв | = | дв | 1 | |
| дс | дс | |||
| дв | = | дв | дт | |
| дс | дс | дт | ||
| дв | = | дв | дт | |
| дс | дт | дс | ||
| дв | = | и | 1 | |
| дс | против |
Следующий шаг, разделение переменных. Соберите похожие вещи и интегрируйте их. Вот что мы получаем при постоянном ускорении…
Соберите похожие вещи и интегрируйте их. Вот что мы получаем при постоянном ускорении…
| = | ||||||||||||||||
| в дв | = | и | ||||||||||||||
| = |
| ||||||||||||||
| ½( v 2 − v 0 2 ) | = | a ( с — с 0 ) | ||||||||||||||
| v 2 | = | v 0 2 + 2 a ( s − s 0 ) [3] 902 64 | ||||||||||||||
Определенно умное решение, и оно было не намного сложнее, чем первые два вывода.