Как найти угол поворота формула
Законы, определяющие движение тела по окружности, аналогичны законам поступательного движения. Уравнения, описывающие вращательное движение, можно вывести из уравнений поступательного движения, произведя в последних следующие замены:
Если:
перемещение s — угловое перемещение (угол поворота) φ,
скорость u — угловая скорость ω,
ускорение a — угловое ускорение α
Вращательное движение, характеристики
| Вращательное движение | Угловая скорость | Угловое ускорение |
|---|---|---|
| Равномерное | Постоянная | Равно нулю |
| Равномерно ускоренное | Изменяется равномерно | Постоянно |
| Неравномерно ускоренное | Изменяется неравномерно | Переменное |
Угол поворота
Во всех уравнения вращательного движения углы задаются в радианах, сокращенно (рад).
Если
φ — угловое перемещение в радианах,
s — длина дуги, заключенной
между сторонами угла поворота,
r — радиус,
то по определению радиана
Соотношение между единицами угла
Обратите внимание: Наименование единицы радиан (рад) обычно указывается в формулах только в тех случаях, когда ее можно спутать с градусом. Поскольку радиан равен отношению длин двух отрезков
Поскольку радиан равен отношению длин двух отрезков
( 1 рад = 1 м/ 1 м = 1 ), он не имеет размерности.
Соотношение между угловой скоростью, угловым перемещением и временем для всех видов движения по окружности наглядно видны на графике угловой скорости (зависимость ω от t). Поэтому графику можно определить, какой угловой скоростью обладает тело в тот или иной момент времени и на какой угол с момента начала движения оно повернулось (он характеризуется площадью под кривой).
Кроме того, для представления соотношений между названными величинами используют график углового перемещения (зависимость φ от t) и график углового ускорения (зависимость α от t).
Число оборотов
Характеристикой всех видов вращения является число оборотов n или равноценная ей характеристика — частота f. Обе величины характеризуют число оборотов в единицу времени.
Единица СИ частоты (или числа оборотов)
В технике число оборотов обычно измеряется в оборотах в минуту (об/мин) = 1/мин.
Таким образом, величина, обратная числу оборотов, есть продолжительность одного оборота.
Если
n — число оборотов,
f — частота,
T — продолжительность одного оборота, период,
φ — угловое перемещение,
N — полное число оборотов,
t — время, продолжительность вращения,
ω — угловая частота,
то
Период
Угловое перемещение
Угловое перемещение равно произведению полного числа оборотов на 2π:
Угловая скорость
Из формулы для одного оборота следует:
Обратите внимание:
• формулы (1)—(6) справедливы для всех видов вращательного движения — как для равномерного движения, так и для ускоренного. В них могут входить постоянные величины, средние значения, начальные и конечные значения, а также любые мгновенные значения.
• вопреки своему названию число оборотов n — это не число, а физическая величина.
• следует различать число оборотов n и полное число оборотов N.
Движение по окружности — простейший случай криволинейного движения тела. Когда тело движется вокруг некоторой точки, наряду с вектором перемещения удобно ввести угловое перемещение ∆ φ (угол поворота относительно центра окружности), измеряемое в радианах.
Когда тело движется вокруг некоторой точки, наряду с вектором перемещения удобно ввести угловое перемещение ∆ φ (угол поворота относительно центра окружности), измеряемое в радианах.
Зная угловое перемещение, можно вычислить длину дуги окружности (путь), которую прошло тело.
Если угол поворота мал, то ∆ l ≈ ∆ s .
Угловая скорость
При криволинейном движении вводится понятие угловой скорости ω , то есть скорости изменения угла поворота.
Определение. Угловая скорость
Угловая скорость в данной точке траектории — предел отношения углового перемещения ∆ φ к промежутку времени ∆ t , за которое оно произошло. ∆ t → 0 .
ω = ∆ φ ∆ t , ∆ t → 0 .
Единица измерения угловой скорости — радиан в секунду ( р а д с ).
Существует связь между угловой и линейной скоростями тела при движении по окружности. Формула для нахождения угловой скорости:
Нормальное ускорение
При равномерном движении по окружности, скорости v и ω остаются неизменными. Меняется только направление вектора линейной скорости.
Меняется только направление вектора линейной скорости.
При этом равномерное движение по окружности на тело действует центростремительное, или нормальное ускорение, направленное по радиусу окружности к ее центру.
a n = ∆ v → ∆ t , ∆ t → 0
Модуль центростремительного ускорения можно вычислить по формуле:
a n = v 2 R = ω 2 R
Докажем эти соотношения.
Рассмотрим, как изменяется вектор v → за малый промежуток времени ∆ t . ∆ v → = v B → — v A → .
В точках А и В вектор скорости направлен по касательной к окружности, при этом модули скоростей в обеих точках одинаковы.
По определению ускорения:
a → = ∆ v → ∆ t , ∆ t → 0
Взглянем на рисунок:
Треугольники OAB и BCD подобны. Из этого следует, что O A A B = B C C D .
Если значение угла ∆ φ мало, расстояние A B = ∆ s ≈ v · ∆ t . Принимая во внимание, что O A = R и C D = ∆ v для рассмотренных выше подобных треугольников получим:
R v ∆ t = v ∆ v или ∆ v ∆ t = v 2 R
При ∆ φ → 0 , направление вектора ∆ v → = v B → — v A → приближается к направлению на центр окружности. Принимая, что ∆ t → 0 , получаем:
Принимая, что ∆ t → 0 , получаем:
a → = a n → = ∆ v → ∆ t ; ∆ t → 0 ; a n → = v 2 R .
При равномерном движении по окружности модуль ускорения остается постоянным, а направление вектора изменяется со временем, сохраняя ориентацию на центр окружности. Именно поэтому это ускорение называется центростремительным: вектор в любой момент времени направлен к центру окружности.
Запись центростремительного ускорения в векторной форме выглядит следующим образом:
Здесь R → — радиус вектор точки на окружности с началом в ее центре.
Тангенциальное ускорение
В общем случае ускорение при движении по окружности состоит из двух компонентов — нормальное, и тангенциальное.
Рассмотрим случай, когда тело движется по окружности неравномерно. Введем понятие тангенциального (касательного) ускорения. Его направление совпадает с направлением линейной скорости тела и в каждой точке окружности направлено по касательной к ней.
a τ = ∆ v τ ∆ t ; ∆ t → 0
Здесь ∆ v τ = v 2 — v 1 — изменение модуля скорости за промежуток ∆ t
Направление полного ускорения определяется векторной суммой нормального и тангенциального ускорений.
Движение по окружности в плоскости можно описывать при помощи двух координат: x и y. В каждый момент времени скорость тела можно разложить на составляющие v x и v y .
Если движение равномерное, величины v x и v y а также соответствующие координаты будут изменяться во времени по гармоническому закону с периодом T = 2 π R v = 2 π ω
Законы, определяющие движение тела по окружности, аналогичны законам поступательного движения. Уравнения, описывающие вращательное движение, можно вывести из уравнений поступательного движения, произведя в последних следующие замены:
Если:
перемещение s — угловое перемещение (угол поворота) ?,
скорость u — угловая скорость ?,
ускорение a — угловое ускорение ?
Угол поворота
Во всех уравнения вращательного движения углы задаются в радианах, сокращенно (рад).
Если
? — угловое перемещение в радианах,
s — длина дуги, заключенной
между сторонами угла поворота,
r — радиус,
то по определению радиана
Соотношение между единицами угла
Обратите внимание: Наименование единицы радиан (рад) обычно указывается в формулах только в тех случаях, когда ее можно спутать с градусом. Поскольку радиан равен отношению длин двух отрезков
Поскольку радиан равен отношению длин двух отрезков
(1рад = 1м/ 1м = 1), он не имеет размерности.
Соотношение между угловой скоростью, угловым перемещением и временем для всех видов движения по окружности наглядно видны на графике угловой скорости (зависимость ? от t). Поэтому графику можно определить, какой угловой скоростью обладает тело в тот или иной момент времени и на какой угол с момента начала движения оно повернулось (он характеризуется площадью под кривой).
Кроме того, для представления соотношений между названными величинами используют график углового перемещения (зависимость ? от t) и график углового ускорения (зависимость ? от t).
Число оборотов
Характеристикой всех видов вращения является число оборотов n или равноценная ей характеристика — частота f. Обе величины характеризуют число оборотов в единицу времени.
Единица СИ частоты (или числа оборотов)
В технике число оборотов обычно измеряется в оборотах в минуту (об/мин) = 1/мин.
Таким образом, величина, обратная числу оборотов, есть продолжительность одного оборота.
Если
n — число оборотов,
f — частота,
T — продолжительность одного оборота, период,
? — угловое перемещение,
N — полное число оборотов,
t — время, продолжительность вращения,
? — угловая частота,
то
Период
Угловое перемещение
Угловое перемещение равно произведению полного числа оборотов на 2?:
Угловая скорость
Из формулы для одного оборота следует:
Обратите внимание:
• формулы справедливы для всех видов вращательного движения — как для равномерного движения, так и для ускоренного. В них могут входить постоянные величины, средние значения, начальные и конечные значения, а также любые мгновенные значения.
• вопреки своему названию число оборотов n — это не число, а физическая величина.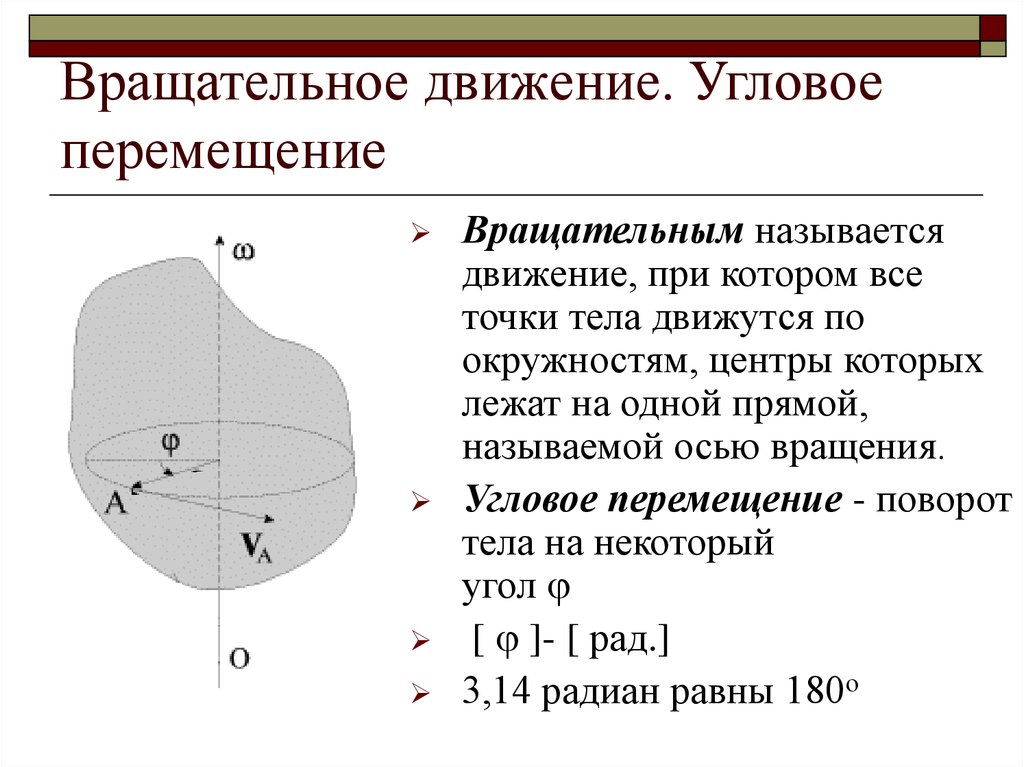
• следует различать число оборотов n и полное число оборотов N.
Равномерное движение тела по окружности
Говорят, что тело движется по окружности равномерно, если его угловая скорость постоянна, т.е. тело за равные промежутки времени поворачивается на один и тот же угол.
? — угловая скорость (постоянная в течение времени t)
? — угловое перемещение
t — время поворота на угол ?
Поскольку на графике угловой скорости площадь прямоугольника соответствует угловому перемещению, имеем:
Постоянная угловая скорость — есть отношение углового перемещения (угла поворота) ко времени, затраченному на это перемещение.
Единица СИ угловой скорости:
Равномерно ускоренное движение по окружности без начальной угловой скорости
Тело начинает двигаться из состояния покоя, и его угловая скорость равномерно возрастает.
? — мгновенная угловая скорость тела в момент времени t
? — угловое ускорение, постоянное в течение времени t
? — угловое перемещение тела за время t, (? в радианах)
t — время
Поскольку на графике скорости угловое перемещение равно площади треугольника, имеем:
Поскольку вращение тела начинается из состояния покоя, изменение угловой скорости ?? равно достигнутой в результате ускорения угловой скорости ?. Поэтому формула принимает следующий вид:
Поэтому формула принимает следующий вид:
Равномерно ускоренное движение по окружности с начальной угловой скоростью
Начальная скорость тела, равная ?0 в момент t = 0, изменяется равномерно на величину ??. (Угловое ускорение при этом постоянно.)
?0 — начальная угловая скорость
? — конечная угловая скорость
? — угловое перемещение тела за время t в радианах
t — время
? — угловое ускорение постоянное в течение времени t
Поскольку на графике скорости угловое перемещение соответствует площади трапеции под кривой скорости, имеем:
Так как площадь трапеции равна сумме площадей образующих ее треугольника и прямоугольника, получаем:
Далее из графика скорости следует
Совместив формулы мы получим
После преобразования получаем выражение, не содержащее времени:
Неравномерно ускоренное движение тела по окружности
Движение тела по окружности будет неравномерно ускоренным, если изменение угловой скорости происходит не пропорционально времени, т. е. если угловое ускорение не остается постоянным. В этом случае и угловая скорость и угловое ускорение являются функциями времени.
е. если угловое ускорение не остается постоянным. В этом случае и угловая скорость и угловое ускорение являются функциями времени.
Связь величин ?, ? и ? представлена на соответствующих графиках.
Мгновенная угловая скорость
Полный угол поворота тела в любой момент времени можно определить по графику углового перемещения. Чем круче график, тем больше в данный момент времени мгновенная угловая скорость.
? — угол между касательной и осью времени t
? — мгновенная угловая скорость
? — угловое перемещение к моменту времени t
Мгновенной угловой скоростью называется первая производная функции ? = ?(t) по времени.
Обратите внимание:
1) чтобы вычислить мгновенную угловую скорость ?, необходимо знать зависимость углового перемещения от времени.
2) формула углового перемещения при равномерном движении тела по окружности и формула углового перемещения при равномерно ускоренном движении по окружности без начальной угловой скорости являются частными случаями формулы (2) соответственно для ? = 0 и ? = const.
Из формул следует:
Проинтегрировав обе части выражения, получим
Угловое перемещение есть интеграл по времени от угловой скорости.
Обратите внимание:
Для вычисления углового перемещения ? необходимо знать зависимость угловой скорости от времени.
Средняя угловая скорость
Средняя угловая скорость для некоторого интервала времени
Среднее число оборотов определяется аналогично формуле:
Вращательное движение тела, формулы
При вращательном движении твердого тела все элементы его массы, не лежащие на оси вращения, совершают движение по окружности. Аналогично и материальная точка, находящаяся на расстоянии r > 0 от оси вращения, также совершает движение по окружности, как и любое тело, достаточно удаленное от оси вращения.
Линейное перемещение Sл, линейная скорость uл и линейное ускорение aл при таком движении связаны между собой обычными для поступательного движения соотношениями.
Кроме того, эти величины связаны определенным образом с угловым перемещением
| Sл | перемещение тела по траектории, | метр |
|---|---|---|
| Uл | скорость тела при движении по траектории, | метр / секунда |
| aл | ускорение данного тела при движении по траектории, | метр / секунда2 |
| r | радиус траектории, | метр |
| d | диаметр траектории, | метр |
| ? | угловое перемещение тела, | радиан |
| ? | угловая скорость тела, | радиан / секунда |
| ? | угловое ускорение тела, | радиан / секунда2 |
| f | частота, | Герц |
Примечание:Формулы справедливы для постоянных, мгновенных и средних величин, во всех случаях движения тела по окружности.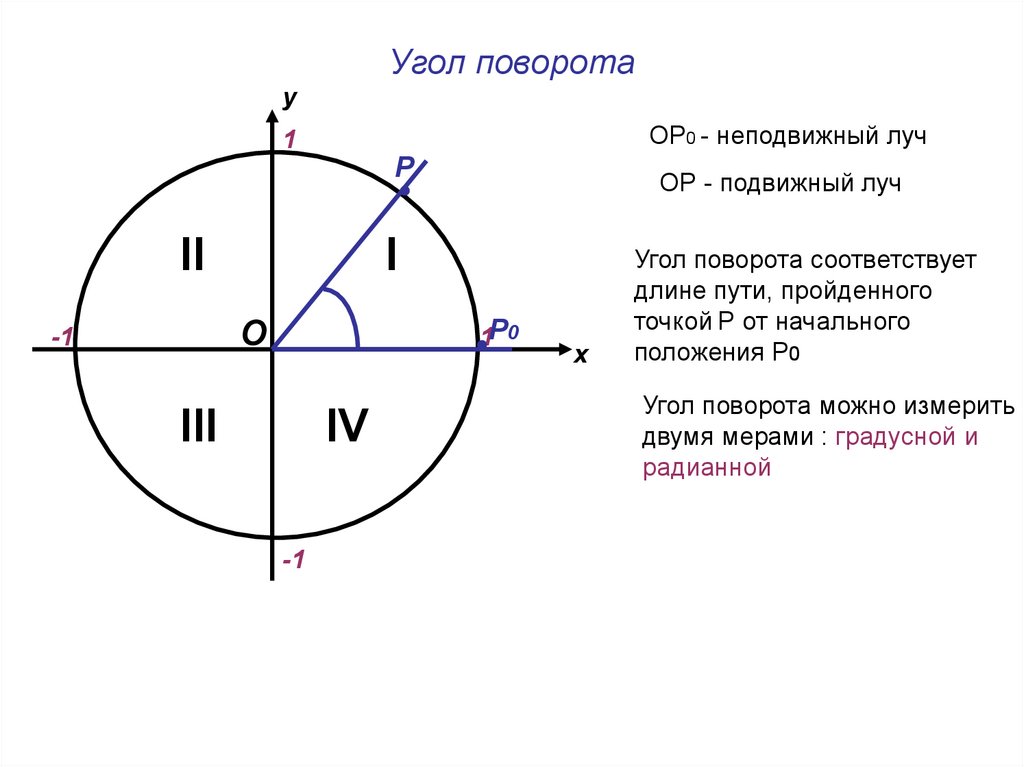
Векторные величины, характеризующие вращательное движение тела
| Угловая скорость и угловое ускорение тела являются векторными величинами. Эти векторы направлены вдоль оси вращения (аксиальные векторы), а их длина определяет величину соответствующих характеристик вращательного движения. Направление векторов определяется по правилу буравчика, т. е. совпадает с направлением поступательного движения буравчика, рукоятка которого движется в том же направлении, что и тело. |
Определение:Если тело участвует одновременно в нескольких вращательных движениях, то результирующая угловая скорость определяется по правилу векторного (геометрического) сложения:
Величина результирующей угловой скорости определяется по аналогии с формулой (Сложение движений):
или, если оси вращения перпендикулярны друг другу
Примечание: Результирующее угловое ускорение определяется аналогичным образом.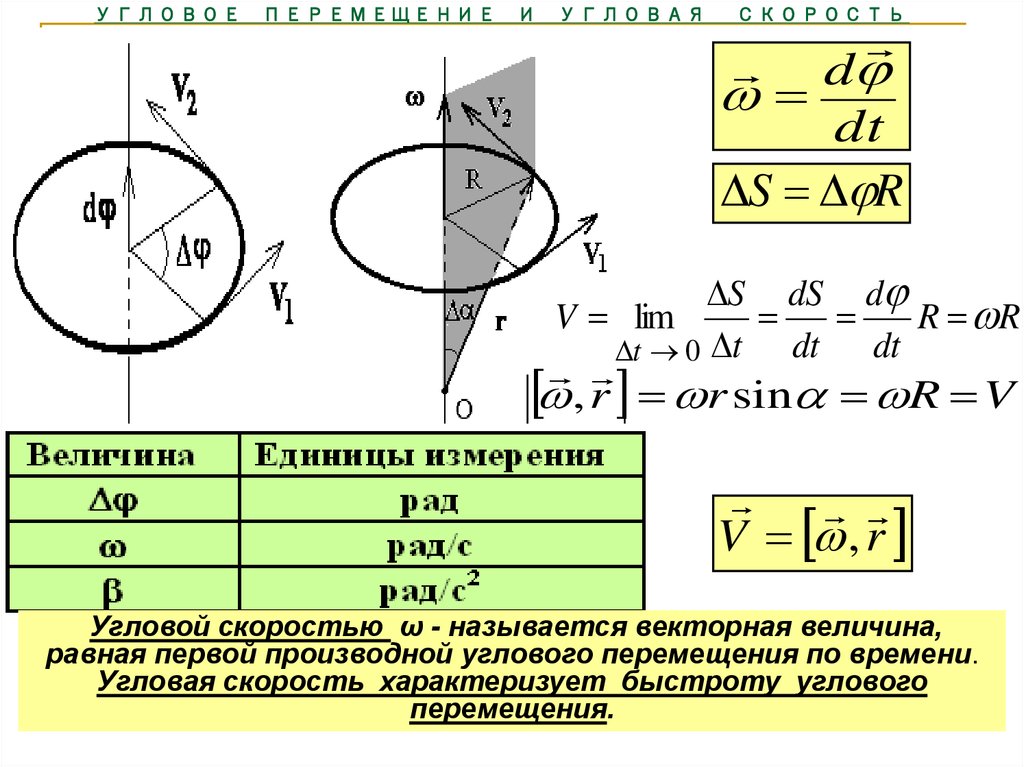 Графически результирующую можно найти как диагональ параллелограмма скоростей или ускорений.
Графически результирующую можно найти как диагональ параллелограмма скоростей или ускорений.
Как определить угол поворота
В тригонометрии важным понятием является угол поворота. Ниже мы последовательно будем давать представление о повороте, и вводить все сопутствующие понятия. Начнем с общего представления о повороте, скажем о полном обороте. Далее перейдем к понятию угла поворота и рассмотрим его основные характеристики, такие как направление и величина поворота. Наконец, дадим определение поворота фигуры вокруг точки. Всю теорию по тексту будем снабжать поясняющими примерами и графическими иллюстрациями.
Навигация по странице.
Что называют поворотом точки вокруг точки?
Сразу отметим, что наряду с фразой «поворот вокруг точки» будем также использовать словосочетания «поворот около точки» и «поворот относительно точки», что обозначает одно и то же.
Введем понятие поворота точки вокруг точки.
Сначала дадим определение центра поворота.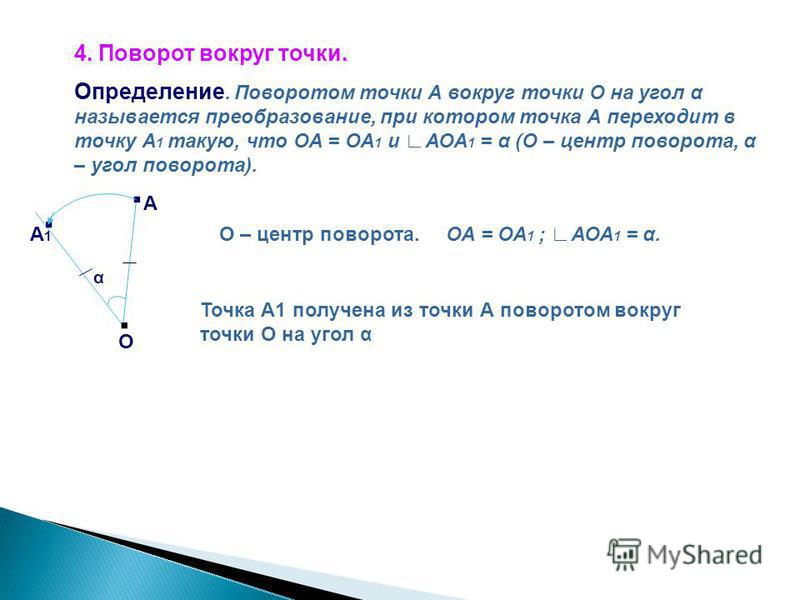
Точку, относительно которой осуществляется поворот, называют центром поворота.
Теперь скажем, что получается в результате поворота точки.
В результате поворота некоторой точки A относительно центра поворота O получается точка A1 (которая в случае некоторого количества полных оборотов может совпадать с A ), причем точка A1 лежит на окружности с центром в точке O радиуса OA . Иными словами, при повороте относительно точки O точка A переходит в точку A1 , лежащую на окружности с центром в точке O радиуса OA .
Считают, что точка O при повороте вокруг самой себя переходит в саму себя. То есть, в результате поворота вокруг центра поворота O точка O переходит в саму себя.
Также стоит отметить, что поворот точки А вокруг точки O стоит рассматривать как перемещение в результате движения точки А по окружности с центром в точке O радиуса OA .
Для наглядности приведем иллюстрации поворота точки А вокруг точки O , на рисунках, расположенных ниже, перемещение точки А в точку А1 покажем при помощи стрелки.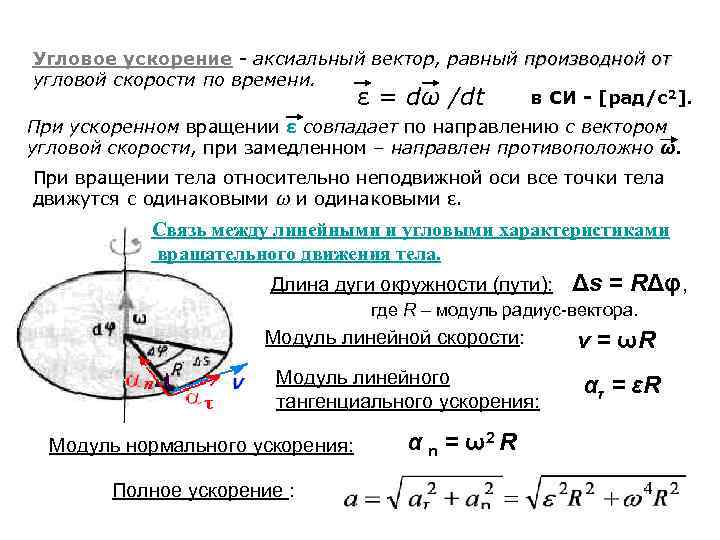
Полный оборот
Можно выполнить такой поворот точки A относительно центра поворота O , что точка А , пройдя все точки окружности, окажется на прежнем месте. При этом говорят, что точка А совершила полный оборот вокруг точки O .
Дадим графическую иллюстрацию полного оборота.
Если же не останавливаться на одном обороте, а продолжать движение точки по окружности, то можно выполнить два, три и так далее полных оборотов. На чертеже ниже справа показано, как могут быть произведены два полных оборота, а слева — три оборота.
Можно также говорить о частях полного оборота, например, о половине оборота, трети, четверти и т.д. оборота (при надобности смотрите статью доли и обыкновенные дроби).
Понятие угла поворота
Из введенного в первом пункте понятия поворота точки понятно, что существует бесконечное множество вариантов поворота точки А вокруг точки O . Действительно, любую точку окружности с центром в точке O радиуса OA можно рассматривать как точку A1 , полученную в результате поворота точки А . Поэтому, чтобы отличать один поворот от другого, вводится понятие угла поворота.
Поэтому, чтобы отличать один поворот от другого, вводится понятие угла поворота.
Одной из характеристик угла поворота является направление поворота. По направлению поворота судят о том, как осуществляется поворот точки – по часовой стрелке или против часовой стрелки.
Другой характеристикой угла поворота является его величина. Углы поворота измеряются в тех же единицах, что и углы в геометрии: наиболее распространены градусы и радианы. Здесь стоит заметить, что угол поворота может выражаться в градусах любым действительным числом из промежутка от минус бесконечности до плюс бесконечности, в отличие от угла в геометрии, величина которого в градусах положительна и не превосходит 180 .
Для обозначения углов поворота обычно используются строчные буквы греческого алфавита: и т.д. Для обозначения большого количества углов поворота часто применяют одну букву с нижними индексами, к примеру, .
Теперь поговорим о характеристиках угла поворота подробнее и по порядку.
Направление поворота
Пусть на окружности с центром в точке O отмечены точки A и A1 . В точку А1 можно попасть из точки A , выполнив поворот вокруг центра O либо по часовой стрелке, либо — против часовой стрелки. Эти повороты логично считать различными.
Условились считать поворотом в положительном направлении такой поворот, который осуществляется против хода часовой стрелки. Поворот по часовой стрелке называют поворотом в отрицательном направлении.
Проиллюстрируем повороты в положительном и отрицательном направлении. На чертеже ниже слева показан поворот в положительном направлении, а справа – в отрицательном.
Величина угла поворота, угол произвольной величины
Угол поворота точки, отличной от центра поворота, полностью определяется указанием его величины, с другой стороны, по величине угла поворота можно судить о том, как этот поворот был осуществлен.
Как мы уже упоминали выше, величина угла поворота в градусах выражается числом от −∞ до +∞ . При этом знак плюс соответствует повороту по часовой стрелке, а знак минус – повороту против часовой стрелки.
При этом знак плюс соответствует повороту по часовой стрелке, а знак минус – повороту против часовой стрелки.
Теперь осталось установить соответствие между величиной угла поворота и тем, какому повороту она соответствует.
Начнем с угла поворота, равного нулю градусам. Этому углу поворота отвечает перемещение точки А в себя. Другими словами, при повороте на 0 градусов вокруг точки O точка А остается на месте.
Переходим к повороту точки А вокруг точки O , при котором поворот происходит в пределах половины оборота. Будем считать, что точка А переходит в точку А1 . В этом случае абсолютная величина угла AOA1 в градусах не превосходит 180 . Если поворот происходил в положительном направлении, то величина угла поворота считается равной величине угла AOA1 , а если поворот происходил в отрицательном направлении, то его величина считается равной величине угла АОА1 со знаком минус. Для примера приведем рисунок, показывающий углы поворота в 30 , 180 и −150 градусов.
Углы поворота большие 180 градусов и меньшие −180 градусов определяются на основе следующего достаточно очевидного свойства последовательных поворотов: несколько последовательных поворотов точки A вокруг центра O равносильны одному повороту, величина которого равна сумме величин этих поворотов.
Приведем пример, иллюстрирующий данное свойство. Выполним поворот точки А относительно точки O на 45 градусов, а затем еще повернем эту точку на 60 градусов, после чего повернем эту точку на −35 градусов. Обозначим промежуточные точки при этих поворотах как A1 , A2 и A3 . В эту же точку А3 мы могли попасть, выполнив один поворот точки A на угол 45+60+(−35)=70 градусов.
Итак, углы поворота, большие 180 градусов, мы будем представлять как несколько последовательных поворотов на углы, сумма величин которых дает величину исходного угла поворота. Например, угол поворота 279 градусов соответствует последовательным поворотам на 180 и 99 градусов, или на 90 , 90 , 90 и 9 градусов, или на 180 , 180 и −81 градус, или на 279 последовательных поворотов по 1 градусу.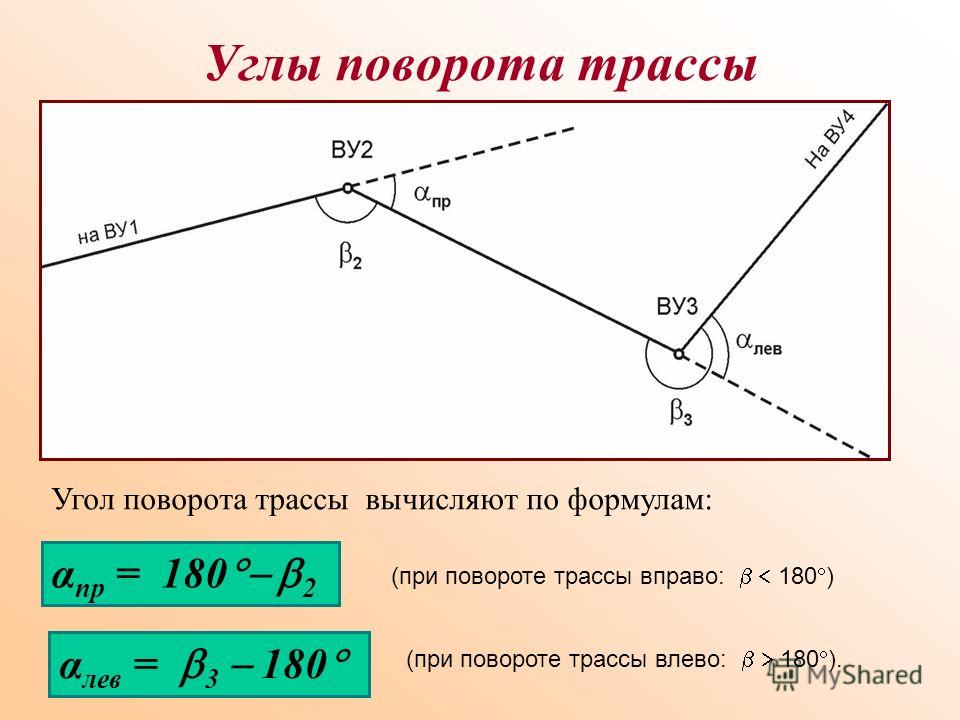
Аналогично определяются и углы поворота, меньшие −180 градусов. К примеру, угол поворота −520 градусов можно интерпретировать как последовательные повороты точки на −180 , −180 и −160 градусов.
Подведем итог. Мы определили угол поворота, величина которого в градусах выражается некоторым действительным числом из промежутка от −∞ до +∞ . В тригонометрии мы будем работать именно с углами поворота, хотя слово «поворот» часто опускают, и говорят просто «угол». Таким образом, в тригонометрии мы будем работать с углами произвольной величины, под которыми будем понимать углы поворота.
В заключение этого пункта отметим, что полный оборот в положительном направлении соответствует углу поворота в 360 градусов (или 2·π радианов), а в отрицательном – углу поворота в −360 градусов (или −2·π рад). При этом удобно большие углы поворота представлять как некоторое количество полных оборотов и еще один поворот на угол величиной от −180 до 180 градусов. Для примера возьмем угол поворота 1 340 градусов. Несложно 1 340 представить как 360·4+(−100) . То есть, исходному углу поворота отвечают 4 полных оборота в положительном направлении и последующий поворот на −100 градусов. Другой пример: угол поворота −745 градусов можно интерпретировать как два оборота против часовой стрелки и последующий поворот на −25 градусов, так как −745=(−360)·2+(−25) .
Несложно 1 340 представить как 360·4+(−100) . То есть, исходному углу поворота отвечают 4 полных оборота в положительном направлении и последующий поворот на −100 градусов. Другой пример: угол поворота −745 градусов можно интерпретировать как два оборота против часовой стрелки и последующий поворот на −25 градусов, так как −745=(−360)·2+(−25) .
Поворот фигуры вокруг точки на угол
Понятие поворота точки легко расширяется на поворот любой фигуры вокруг точки на угол (речь идет о таком повороте, что и точка, относительно которой осуществляется поворот, и фигура, которую поворачивают, лежат в одной плоскости).
Под поворотом фигуры будем понимать поворот всех точек фигуры вокруг заданной точки на данный угол.
В качестве примера приведем иллюстрацию следующему действию: выполним поворот отрезка AB на угол относительно точки O , это отрезок при повороте перейдет в отрезок A1B1 .
Законы, определяющие движение тела по окружности, аналогичны законам поступательного движения. Уравнения, описывающие вращательное движение, можно вывести из уравнений поступательного движения, произведя в последних следующие замены:
Уравнения, описывающие вращательное движение, можно вывести из уравнений поступательного движения, произведя в последних следующие замены:
Если:
перемещение s — угловое перемещение (угол поворота) φ,
скорость u — угловая скорость ω,
ускорение a — угловое ускорение α
Вращательное движение, характеристики
| Вращательное движение | Угловая скорость | Угловое ускорение |
|---|---|---|
| Равномерное | Постоянная | Равно нулю |
| Равномерно ускоренное | Изменяется равномерно | Постоянно |
| Неравномерно ускоренное | Изменяется неравномерно | Переменное |
Угол поворота
Во всех уравнения вращательного движения углы задаются в радианах, сокращенно (рад).
Если
φ — угловое перемещение в радианах,
s — длина дуги, заключенной
между сторонами угла поворота,
r — радиус,
то по определению радиана
Соотношение между единицами угла
Обратите внимание: Наименование единицы радиан (рад) обычно указывается в формулах только в тех случаях, когда ее можно спутать с градусом.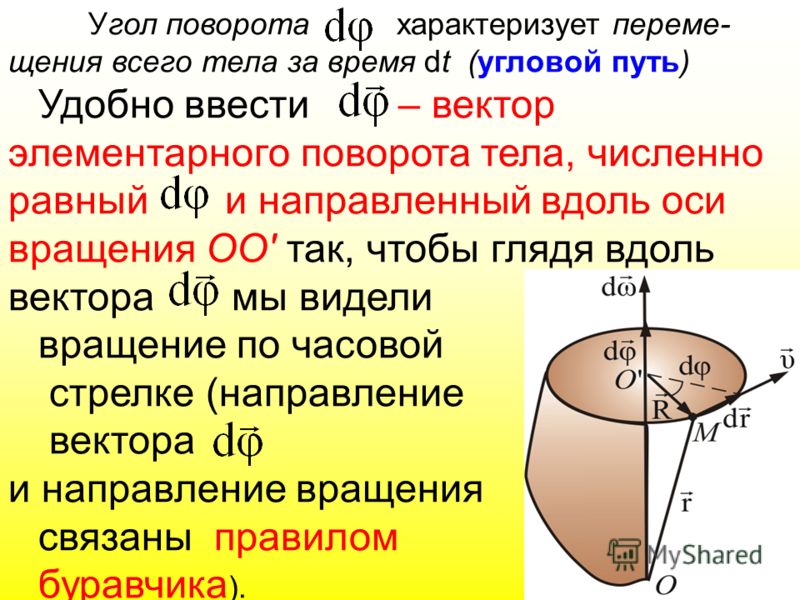 Поскольку радиан равен отношению длин двух отрезков
Поскольку радиан равен отношению длин двух отрезков
( 1 рад = 1 м/ 1 м = 1 ), он не имеет размерности.
Соотношение между угловой скоростью, угловым перемещением и временем для всех видов движения по окружности наглядно видны на графике угловой скорости (зависимость ω от t). Поэтому графику можно определить, какой угловой скоростью обладает тело в тот или иной момент времени и на какой угол с момента начала движения оно повернулось (он характеризуется площадью под кривой).
Кроме того, для представления соотношений между названными величинами используют график углового перемещения (зависимость φ от t) и график углового ускорения (зависимость α от t).
Число оборотов
Характеристикой всех видов вращения является число оборотов n или равноценная ей характеристика — частота f. Обе величины характеризуют число оборотов в единицу времени.
Единица СИ частоты (или числа оборотов)
В технике число оборотов обычно измеряется в оборотах в минуту (об/мин) = 1/мин.
Таким образом, величина, обратная числу оборотов, есть продолжительность одного оборота.
Если
n — число оборотов,
f — частота,
T — продолжительность одного оборота, период,
φ — угловое перемещение,
N — полное число оборотов,
t — время, продолжительность вращения,
ω — угловая частота,
то
Период
Угловое перемещение
Угловое перемещение равно произведению полного числа оборотов на 2π:
Угловая скорость
Из формулы для одного оборота следует:
Обратите внимание:
• формулы (1)—(6) справедливы для всех видов вращательного движения — как для равномерного движения, так и для ускоренного. В них могут входить постоянные величины, средние значения, начальные и конечные значения, а также любые мгновенные значения.
• вопреки своему названию число оборотов n — это не число, а физическая величина.
• следует различать число оборотов n и полное число оборотов N.
Среди множества терминов тригонометрии важным является понятие угла поворота. В данной статье рассмотрим поворот и все соответствующие ему определения; дадим представление о полном обороте; изучим угол поворота и его характеристики, а также поворот фигуры вокруг точки. Для лучшего понимания теория будет снабжена иллюстрациями и практическими примерами.
В данной статье рассмотрим поворот и все соответствующие ему определения; дадим представление о полном обороте; изучим угол поворота и его характеристики, а также поворот фигуры вокруг точки. Для лучшего понимания теория будет снабжена иллюстрациями и практическими примерами.
Поворот точки вокруг точки
Центр поворота – точка, относительно которой осуществлен поворот.
Рассмотрим, что происходит в результате поворота точки. Пусть некоторая точка А поворачивается относительно центра поворота О , в результате чего получается точка А 1 (при совершении некоторого количества полных оборотов она может совпасть с точкой А ). При этом точка А 1 лежит на окружности с центром в точке О радиуса О А . Другими словами, когда точка А осуществляет поворот относительно точки О , она переходит в точку А 1 , лежащую на окружности с центром О радиуса О А .
Считается, что в данном случае точка О при осуществлении поворота вокруг самой себя переходит в саму себя. Или: когда точка О осуществляет поворот вокруг центра поворота О , она переходит в саму себя.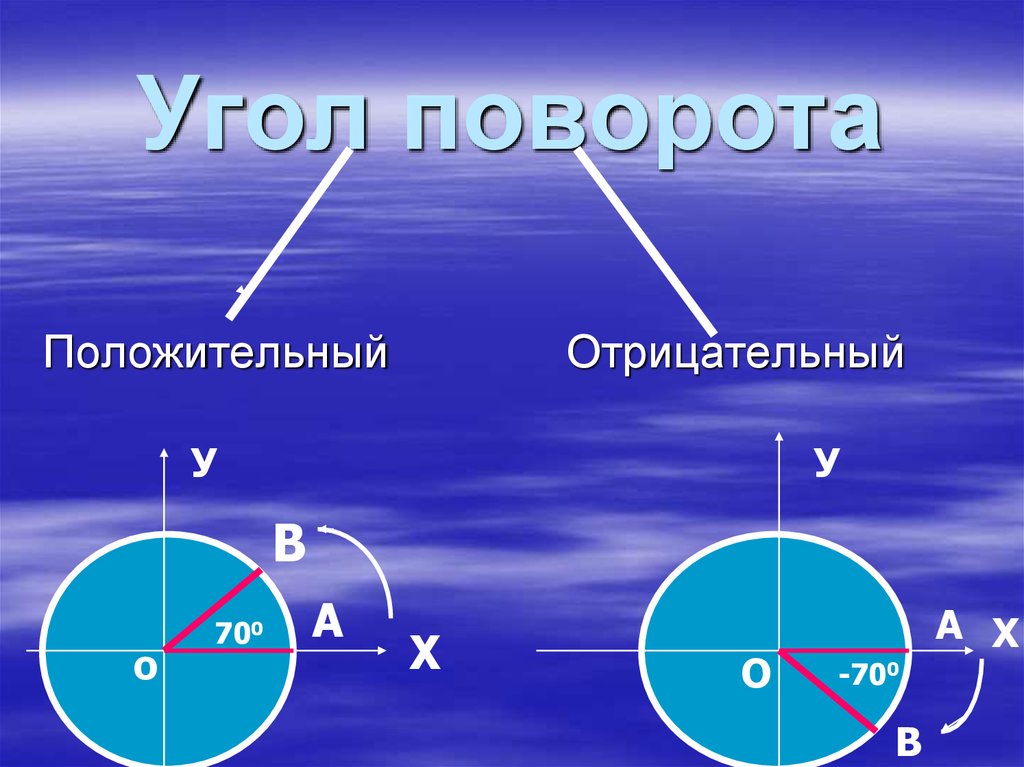
Отметим также, что поворот точки А относительно центра О нужно рассматривать, в том числе, как перемещение в результате движения точки А по окружности с центром в точке О радиуса О А .
Изобразим графически поворот точки А относительно точки О , перемещение точки А в точку А 1 отметим стрелкой:
Полный оборот
Возможно осуществить поворот точки А относительно центра поворота О таким образом, что точка А , пройдя все точки окружности, вернется на прежнее свое место. Тогда говорим, что точка совершила полный оборот вокруг точки О .
Если движение точки А по окружности продолжится, то будет выполнено два, три и так далее полных оборотов. На иллюстрации ниже справа отображено два полных оборота, а слева – три:
В рамках всего вышесказанного можно также говорить о частях полного оборота. Например, о половине оборота или трети, или четверти и так далее.
Угол поворота
Из указанного выше понятия поворота точки очевидно, что возможно бесконечное множество вариаций поворота точки А относительно центра О . Любую точку окружности с центром О можно рассматривать как точку А 1 , полученную в результате поворота точки А . Поэтому для определения отличия одного поворота от другого вводится понятие угла поворота.
Любую точку окружности с центром О можно рассматривать как точку А 1 , полученную в результате поворота точки А . Поэтому для определения отличия одного поворота от другого вводится понятие угла поворота.
Угол поворота имеет свои характеристики, одна из которых – направление поворота. По нему определяют, как перемещалась точка – по часовой стрелке или против.
Еще одной характеристикой угла поворота служит его величина. Углы поворота имеют ту же единицу измерения, что и углы в геометрии: наиболее распространены градусы и радианы. Отметим, что угол поворота может выражаться в градусах любым действительным числом в промежутке от — ∞ до + ∞ , что отличает его от угла в геометрии, который выражается только положительным числом, не превосходящим 180 ° .
Чтобы обозначить углы поворота, стандартно используют буквы греческого алфавита: α , β , γ и так далее. Чтобы обозначить большое количество углов поворота, применяют одну и ту же букву с различными нижними индексами: α 1 , α 2 , α 3 … .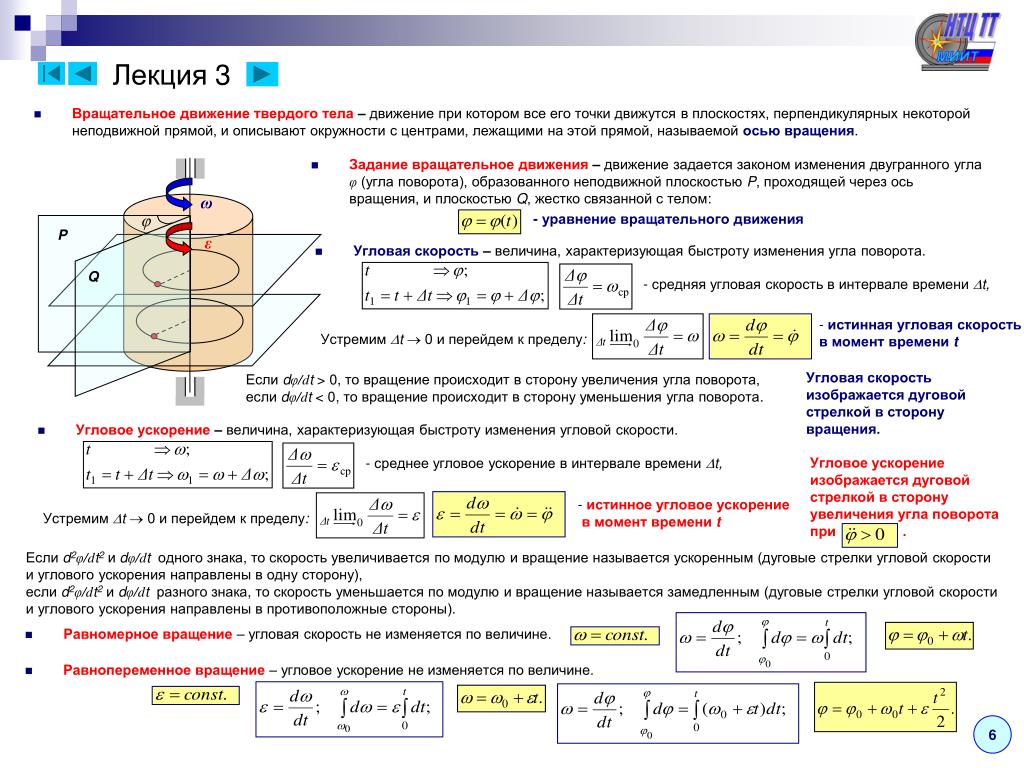 . α n .
. α n .
Разберем характеристики угла поворота подробнее.
Направление поворота
Отметим на окружности с центром О точки А и А 1 . В точку А 1 возможно попасть, совершив точкой А поворот относительно центра О либо по часовой стрелке, либо – против. Очевидно определять эти повороты, как различные.
Принято считать, что поворот по часовой стрелке – поворот в отрицательном направлении направлении, а поворот против часовой стрелки – поворот в положительном направлении.
Приведем графическую иллюстрацию различных поворотов: слева на чертеже – поворот в положительном направлении; справа – в отрицательном.
Величина угла поворота, угол произвольной величины
Угол поворота точки, не являющейся центром поворота, в полной мере определяется указанием его величины. С другой стороны, по величине угла поворота можно определить, каким образом поворот был осуществлен.
Как было сказано выше, величина угла поворота варьируется в пределах от — ∞ до + ∞ ;
Знак плюс определяет поворот против часовой стрелки, а минус – по часовой стрелке.
Необходимо установить соответствие между самой величиной угла поворота и тем, какому повороту она соответствует.
Пусть угол поворота равен 0 ° . Такому углу поворота соответствует перемещение точки в саму себя. Иначе говоря, при повороте вокруг точки О на 0 ° точка A остается на месте.
Теперь предположим, что поворот точки А происходит в пределах половины оборота: пусть точка А переходит в точку А 1 . В таком случае абсолютная величина угла А О А 1 , выраженная в градусах, не превосходит 180 . Если поворот имел положительное направление, то величина угла поворота считается равной величине угла А О А 1 ; если отрицательное – величина угла поворота равна величине угла А О А 1 со знаком минус. Для иллюстрации этих утверждений отобразим на чертеже углы поворота в 30 ° , 180 ° и — 150 ° :
Углы поворота, превышающие 180 или меньшие – 180 определяются, исходя из очевидного свойства последовательных поворотов:
Несколько последовательных поворотов точки А относительно центра О равносильны одному повороту, величина которого равна сумме величин этих поворотов.
Рассмотрим пример, который даст нам возможность графически проиллюстрировать описанное свойство. Пусть точка А выполняет поворот относительно центра О на 45 ° , затем еще на 60 ° и еще раз — на — 35 ° . Обозначим промежуточные точки поворотов А 1 , А 2 и А 3 . В конечную точку А 3 возможно было попасть, совершив один поворот на угол поворота, величина которого равна: 45 ° + 60 ° + ( — 35 ° ) = 70 ° . Проиллюстрируем:
Таким, образом, углы, превышающие 180 ° , будем представлять, как несколько последовательных поворотов на углы, сумма величин которых определяет величину исходного угла поворота. Например, угол поворота 298 ° соответствует последовательным поворотам на 180 ° и 118 ° , или 90 ° , 90 ° , 90 ° и 28 ° , или 180 ° , 180 ° и — 62 ° , или 298 последовательных поворотов на 1 ° .
По такому же принципу определяются углы меньше — 180 ° . Например, угол поворота — 515 ° можно определить, как последовательные повороты на — 180 ° , — 180 ° и — 155 ° .
Нами был определен угол поворота, и его величина выражается в градусах некоторым действительным числом в пределах от — ∞ до + ∞ . Тригонометрия работает именно с углами поворота, хотя для удобства слово «поворот» опускают и говорят «угол». Т.е. будем рассматривать углы произвольной величины, понимая под ними углы поворота.
Тригонометрия работает именно с углами поворота, хотя для удобства слово «поворот» опускают и говорят «угол». Т.е. будем рассматривать углы произвольной величины, понимая под ними углы поворота.
В заключение также отметим, что полный оборот в положительном направлении соответствует углу поворота в 360 ° или 2 π радиан. Соответственно при отрицательном направлении полный оборот будет соответствовать углу в — 360 ° или — 2 π радиан.
При этом удобно большие углы поворота представлять, как некоторое количество полных оборотов и еще один на величину в пределах от — 180 ° до 180 ° . К примеру, поворот осуществляется на 1478 ° . Представим эту величину как: 360 · 4 + 38 , т.е. заданному углу поворота соответствуют 4 полных оборота и еще один поворот – на 38 ° . Или еще один пример: угол поворота в — 815 ° можно представить, как ( — 360 ) · 2 + ( — 95 ) , т.е. заданному углу поворота соответствуют 2 полных оборота в отрицательном направлении (против часовой стрелки) и еще один поворот того же направления на — 95 ° .
Поворот фигуры вокруг точки на угол
Понятие поворота точки легко распространить на поворот любой фигуры вокруг точки на угол (такой поворот, при котором и точка, относительно которой осуществляется поворот, и сама поворачиваемая фигура лежат в одной плоскости).
Поворот фигуры – это поворот всех ее точек вокруг заданной точки на заданный угол.
Как пример, иллюстрируем следующее действие: поворот отрезка А В на угол α относительно точки О – при повороте заданный отрезок перейдет в отрезок А 1 В 1 .
Угол поворота
Горячая математикаА вращение это трансформация в плоскости, которая поворачивает каждую точку фигуры на заданный угол и направление вокруг фиксированной точки.
Неподвижная точка называется центр вращения .
Величина вращения называется углом поворота и измеряется в градусах.
Вы можете использовать транспортир для измерения заданного угла против часовой стрелки.
Рассмотрим рисунок ниже.
Здесь, Δ А ‘ Б ‘ О получается путем вращения Δ А Б О по 180 ° о происхождении. Обратите внимание, что оба А О А ‘ а также Б О Б ‘ являются прямыми линиями.
Так, м ∠ А О А ‘ знак равно 180 ° знак равно м ∠ Б О Б ‘ .
Пример:
Сколько градусов имеет Δ Икс Д Z был повернут против часовой стрелки, чтобы получить Δ Икс ‘ Д ‘ Z ‘ ?
А
.
90
°
Б
. 180
°
С
.
270
°
Д
.
360
°
180
°
С
.
270
°
Д
.
360
°
Определите соответствующие вершины вращения.
Икс ( − 6 , 2 ) → Икс ‘ ( 2 , 6 ) Д ( − 2 , 4 ) → Д ‘ ( 4 , 2 ) Z ( − 4 , 5 ) → Z ‘ ( 5 , 4 )
Точка вращения — это начало координат, нарисуйте линии, соединяющие одну из точек, скажем
Икс
и это изображение к происхождению.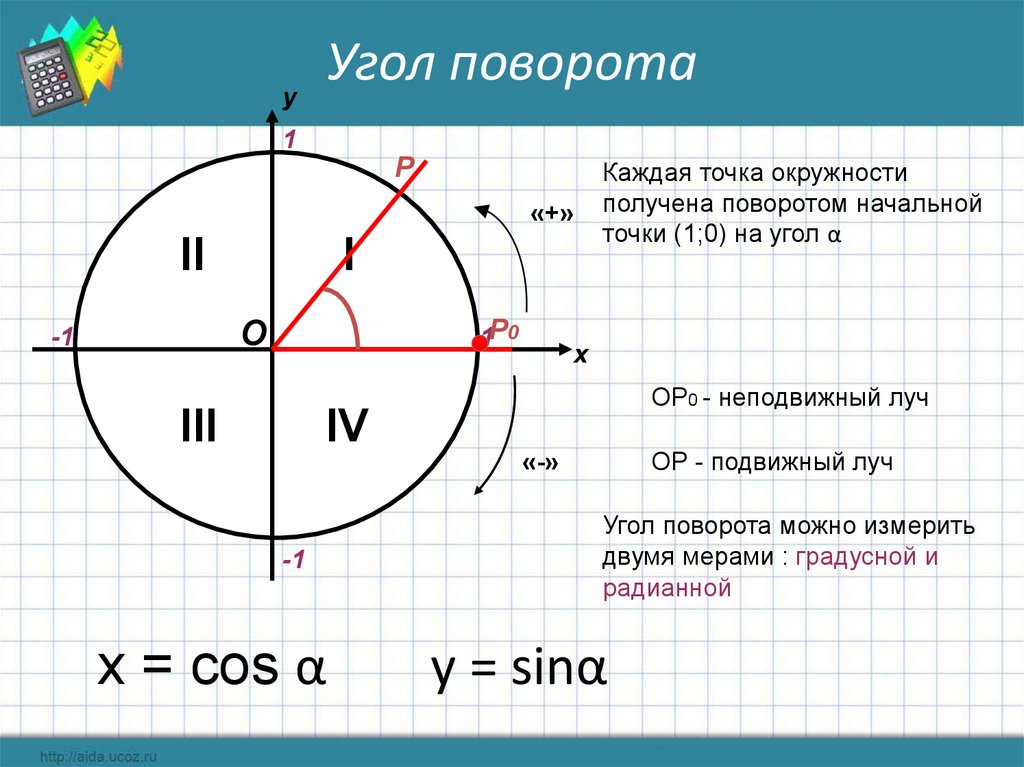
Вы можете видеть, что линии образуют угол 270 ° , против часовой стрелки.
Следовательно, Δ Икс ‘ Д ‘ Z ‘ получается путем вращения Δ Икс Д Z против часовой стрелки 270 ° о происхождении.
Итак, правильный выбор С .
Также обратите внимание, что отношение между соответствующими вершинами равно
(
Икс
,
у
)
→
(
−
у
,
Икс
)
который показывает вращение против часовой стрелки
270
°
о происхождении.
Загрузите наши бесплатные приложения для обучения и книги для подготовки к экзаменам
Как найти угол поворота и ось вращения линейного преобразования?
Попробую по-простому.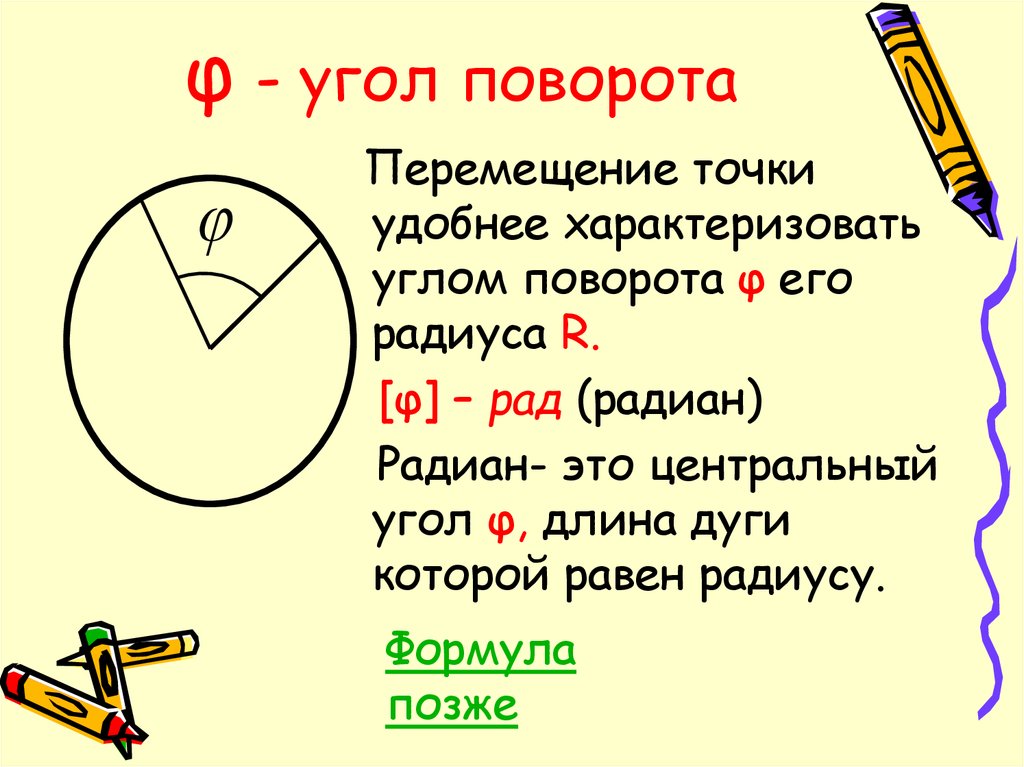 Сначала определите, является ли это матрицей вращения или нет. Чтобы быть матрицей вращения, матрица должна быть ортогональной, а определитель матрицы должен быть +1 (если она ортогональна, а определитель равен -1, то это не матрица вращения). И для этой матрицы $\begin{bmatrix} 0&1&0\\0&0&1\\1&0&0 \end{bmatrix}$ легко убедиться, что она ортогональна и определитель равен +1.
Сначала определите, является ли это матрицей вращения или нет. Чтобы быть матрицей вращения, матрица должна быть ортогональной, а определитель матрицы должен быть +1 (если она ортогональна, а определитель равен -1, то это не матрица вращения). И для этой матрицы $\begin{bmatrix} 0&1&0\\0&0&1\\1&0&0 \end{bmatrix}$ легко убедиться, что она ортогональна и определитель равен +1.
Вероятно, ясно, что вектор на оси матрицы вращения A не изменит направление (как на оси вращения) (как упоминал Лорд Акула Неизвестный), поэтому рассматривая этот вектор как $(x, y,z)$, мы видим, что
$\begin{bmatrix} 0&1&0\\0&0&1\\1&0&0 \end{bmatrix}\begin{bmatrix}x\\y\\z\end{bmatrix} = \begin{ bmatrix}x\\y\\z\end{bmatrix}$
Теперь решим эти линейные уравнения.
Первое уравнение дает $0.x+1.y+0.z = x$, поэтому $y=x$
Второе уравнение дает $0.x+0.y+1.z = y$, поэтому $z=y$
Третье уравнение дает $1.x+0.y+0.z = z$, поэтому $ x=z$
Это дает ось вращения x=y=z, вы можете взять это вдоль линии вектора (1,1,1) или (-1,-1,-1).
Теперь относительно угла поворота может быть немного сложно. Угол поворота в данном случае — это поворот плоскости, перпендикулярной оси вращения. Чтобы узнать величину и направление, нам нужно увидеть вектор на этой плоскости, насколько он был повёрнут и в какую сторону. Теперь направление относительное, в зависимости от того, с какой стороны плоскости вы смотрите.
Из x=y=z можно составить вектор (1,1,1), (-1,-1,-1). Теперь любой вектор (x,y,z), перпендикулярный этим векторам, будет лежать на плоскость, перпендикулярная этим векторам. Чтобы узнать это произвольно, мы устанавливаем скалярное произведение равным нулю, т.е.
$x.1+y.1+z.1=0$ или $z=-x-y$, мы также получаем из условия вращения новый вектор будет ( у, г, х). Таким образом, подставляя произвольные значения для x,y, мы получаем вектор A (1,2,-3), а после поворота вектор B(2,-3,1). Снова воспользуемся скалярным произведением, чтобы найти угол между этими векторами
$AB\cos\theta = 2-6-3$ или , $\sqrt{14}\sqrt{14}\cos\theta = -7$, или $\cos\theta =-1/2$ и получаем $\theta =\pm 2\dfrac{\pi}{3}$.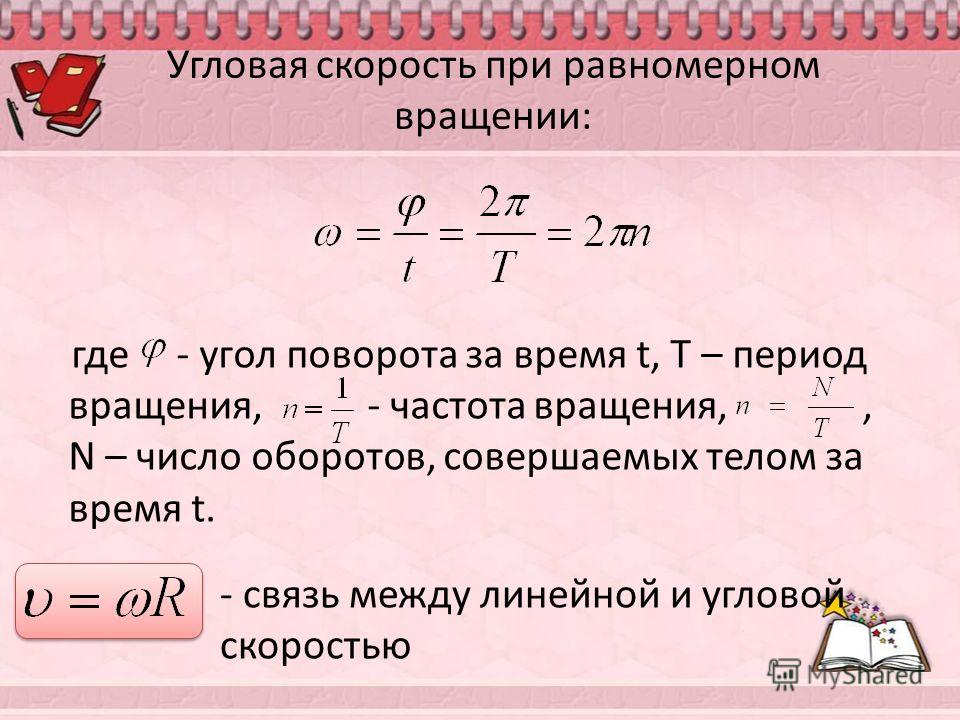 Очевидно, $\theta$ может быть как положительным, так и отрицательным в зависимости от того, с какой стороны мы смотрим на плоскость.
Очевидно, $\theta$ может быть как положительным, так и отрицательным в зависимости от того, с какой стороны мы смотрим на плоскость.
Чтобы понять это, мы используем векторное произведение. Пусть перекрестное произведение (вектор) равно C. Находим его компоненту:
$\begin{bmatrix}1&2&-3\\2&-3&1\\i&j&k\end{bmatrix}$
$C_x =\begin{ bmatrix}2&-3\\-3&1\end{bmatrix} = -7$, $C_y =-\begin{bmatrix}1&-3\\2&1\end{bmatrix} = -7$, $C_z =\begin{bmatrix}1&2\\2&-3\end{bmatrix} = -7$,
Итак, C(-7,-7,-7), мы находим угол из соотношения $C=AB\sin\theta$ или, $7\sqrt{3}=\sqrt{14}\sqrt{14} \sin\theta$, $\sin\theta = \dfrac{\sqrt{3}}{2}$
, поэтому $\theta = \dfrac{\pi}{3}, 2\dfrac{\pi}{ 3}$
Теперь из векторного произведения мы узнали, что если смотреть на плоскость из векторного произведения C(-7,-7,-7), вектор B направлен в положительном направлении, то есть против часовой стрелки от вектора A на положительное углы $\dfrac{\pi}{3}, 2\dfrac{\pi}{3}$ (чтобы получить одно и то же векторное произведение, возможны эти два разных угла).