Равновесие плоской системы сил. Условия равновесия плоской системы сил.
На тело действует плоская система сил. Расположим оси Ox и Oy в плоскости действия сил.
Уравнения 
Для равновесия плоской системы сил, действующих на твердое тело, необходимо и достаточно, чтобы суммы проекций этих сил на каждую из двух прямоугольных осей координат, расположенных в плоскости действия сил, были равны нулю и сумма моментов этих сил относительно любой точки, находящейся в плоскости действия сил также была равна нулю.


Теорема о трех моментах.
Для равновесия плоской системы сил, действующих на твердое тело, необходимо и достаточно, чтобы суммы моментов этих сил системы относительно трех любых точек, расположенных в плоскости действия сил и не лежащих на одной прямой, были равны нулю.
Статически определимые и статически неопределимые задачи.
Для любой плоской системы сил, действующих на твердое тело, имеется три независимых условия равновесия. Следовательно, для любой плоской системы сил из условий равновесия можно найти не более трех неизвестных.
В случае пространственной системы сил, действующих на твердое тело, имеется шесть независимых условия равновесия. Следовательно, для любой пространственной системы сил из условий равновесия можно найти не более шести неизвестных.
Задачи, в которых число неизвестных не больше числа независимых условий равновесия для данной системы сил, приложенных к твердому телу, называются статически определимыми. В противном случае задачи статически неопределимы.
Равновесие пространственной системы сил.
Равнодействующая системы сходящихся сил непосредственно находится с помощью сложения сил по правилу параллелограмма. Очевидно, что аналогичную задачу можно будет решить и для произвольной системы сил, если найти для них метод, позволяющий перенести все силы в одну точку.
Теорема о параллельном переносе силы.Силу, приложенную к абсолютно твердому телу, можно, не изменяя оказываемого ею действия, переносить из данной точки в любую другую точку тела, прибавляя при этом пару с моментом, равным моменту переносимой силы относительно точки, куда сила переносится.
Пусть сила  приложена в точке A. Действие этой силы
не изменяется, если в точке B приложить
две уравновешенные силы. Полученная
система трех сил представляет собой
силу
приложена в точке A. Действие этой силы
не изменяется, если в точке B приложить
две уравновешенные силы. Полученная
система трех сил представляет собой
силу 
 , но приложенную в точке В и пару
, но приложенную в точке В и пару  с моментом . Процесс замены силы
с моментом . Процесс замены силы  силой
силой  и парой сил
и парой сил  называется
приведением силы
называется
приведением силы  к заданному центру В .
к заданному центру В .Приведение системы сил к заданному центру.
Основная теоремастатики (Пуансо).
Любую произвольную систему сил, действующую на твердое тело, можно в общем случае привести к силе и паре сил. Этот процесс замены системы сил одной силой и одной парой сил называется приведением системы сил к заданному центру.
Главным вектором системысилназывается вектор, равный векторной сумме этих сил.

Главным моментом системысилотносительно точки О тела, называется вектор, равный векторной сумме моментов всех сил системы относительно этой точки.
Формулы для вычисления главного вектора и главного момента

studfiles.net
Условия равновесия произвольной пространственной системы сил.
Произвольную пространственную систему сил, как и плоскую, можно привести к какому-нибудь центру О и заменить одной результирующей силой и парой с моментом. Рассуждая так, что для равновесия этой системы сил необходимо и достаточно, чтобы одновременно было
Таким образом, для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из трех координатных осей и суммы их моментов относительно этих осей были равны нулю.
Условия равновесия произвольной пространственной системы сил.
Произвольную пространственную систему сил, как и плоскую, можно привести к какому-нибудь центру О и заменить одной результирующей силой и парой с моментом. Рассуждая так, что для равновесия этой системы сил необходимо и достаточно, чтобы одновременно было R = 0 и Mо = 0. Но векторы имогут обратиться в нуль только тогда, когда равны нулю все их проекции на оси координат, т. е. когдаRx = Ry = Rz = 0 и Mx = My = Mz = 0 или, когда действующие силы удовлетворяют условиям
Таким образом, для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из трех координатных осей и суммы их моментов относительно этих осей были равны нулю.
Принципы решения задач на равновесие тела под действием пространственной системы сил.
Принцип решения задач этого раздела остается тем же, что и для плоской системы сил. Установив, равновесие, какого тела будет рассматриваться, заменяют наложенные на тело связи их реакциями и составляют условия равновесия этого тела, рассматривая его как свободное. Из полученных уравнений определяются искомые величины.
Новым элементом в составлении уравнений является вычисление моментов сил относительно осей координат.
В случаях, когда из общего чертежа трудно усмотреть, чему равен момент данной силы относительно какой-нибудь оси, рекомендуется изобразить на вспомогательном чертеже проекцию рассматриваемого тела (вместе с силой) на плоскость, перпендикулярную к этой оси.
В тех случаях, когда при вычислении момента возникают затруднения в определении проекции силы на соответствующую плоскость или плеча этой проекции, рекомендуется разложить силу на две взаимно перпендикулярные составляющие (из которых одна параллельна какой-нибудь координатной оси), а затем воспользоваться теоремой Вариньона.
Пример 5.
Рама АВ (рис.45) удерживается в равновесии шарниром А и стержнем ВС. На краю рамы находится груз весом Р. Определим реакции шарнира и усилие в стержне.
Рис.45
Рассматриваем равновесие рамы вместе с грузом.
Строим расчётную схему, изобразив раму свободным телом и показав все силы, действующие на неё: реакции связей и вес груза Р. Эти силы образуют систему сил, произвольно расположенных на плоскости.
Желательно составить такие уравнения, чтобы в каждом было по одной неизвестной силе.
Рекомендуется составлять уравнения моментов относительно трёх точек, точек пересечения линий действия неизвестных сил.
В нашей задаче это точка А, где приложены неизвестные и; точкаС, где пересекаются линии действия неизвестных сил и; точкаD – точка пересечения линий действия сил и. Составим уравнение проекций сил на ось
И, прежде чем составлять уравнения, сделаем еще одно полезное замечание. Если на расчётной схеме имеется сила, расположенная так, что плечо её находится непросто, то при определении момента рекомендуется предварительно разложить вектор этой силы на две, более удобно направленные. В данной задаче разложим силу на две:и(рис.37) такие, что модули их
Составляем уравнения:
Из второго уравнения находим . Из третьегоИ из первого
Так как получилось S<0, то стержень ВС будет сжат.
studfiles.net
Условия равновесия произвольной плоской системы сил. Случай параллельных сил.
Для равновесия любой плоской системы сил необходимо и достаточно, чтобы одновременно выполнялись условия: R = 0, M0 = 0.Здесь О — любая точка плоскости.
Найдем вытекающие из равенств аналитические условия равновесия.
Величины R и Мо определяются равенствами:
где НоR может равняться нулю только тогда, когда одновременно Rx = 0 и Ry = 0. Следовательно, условия будут выполнены, если будет:
Равенства выражают, следующие аналитические условия равновесия: для равновесия произвольной плоской системы сил, необходимо и достаточно, чтобы суммы проекций всех сил на каждую из двух координатных осей и сумма их моментов относительно любого центра, лежащего в плоскости действия сил, были равны нулю.
Теорема о трех моментах.
Для равновесия плоской системы сил, действующих на твердое тело, необходимо и достаточно, чтобы суммы моментов этих сил системы относительно трех любых точек, расположенных в плоскости действия сил и не лежащих на одной прямой, были равны нулю.
; ;
Равновесие плоской системы параллельных сил.
В случае, когда все действующие на тело силы параллельны друг другу, мы можем направить ось Ох перпендикулярно к силам, а ось Оу параллельно им (рис. 43). Тогда проекция каждой из сил на Ox будет равна нулю и первое из 3-х равенств обратится в тождество вида 0 = 0. В результате для параллельных сил останется два условия равновесия:
Где ось Оу параллельна силам.

Рис.43.
Статически определимые и статически неопределимые задачи.
Для любой плоской системы сил, действующих на твердое тело, имеется три независимых условия равновесия. Следовательно, для любой плоской системы сил из условий равновесия можно найти не более трех неизвестных.
В случае пространственной системы сил, действующих на твердое тело, имеется шесть независимых условия равновесия. Следовательно, для любой пространственной системы сил из условий равновесия можно найти не более шести неизвестных.
Задачи, в которых число неизвестных не больше числа независимых условий равновесия для данной системы сил, приложенных к твердому телу, называются статически определимыми.
В противном случае задачи статически неопределимы.
Советы при решение задач.
При решения задач этого раздела следует иметь в виду все те общие указания, которые были сделаны ранее.
Приступая к решению, надо, прежде всего, установить, равновесие какого именно тела следует в данной задаче рассмотреть. Затем, выделив это тело и рассматривая его как свободное, следует изобразить все действующие на тело заданные силы и реакции отброшенных связей.
Далее следует составить условия равновесия, применяя ту из форм этих условий, которая приводит к более простой системе уравнений (наиболее простой будет система уравнений, в каждое из которых входит по одному неизвестному).
Для получения более простых уравнений следует (если это только не усложняет ход расчета): а) составляя уравнения проекций, проводить координатную ось, перпендикулярно какой-нибудь неизвестной силе; б) составляя уравнения моментов, брать центр моментов в точке, где пересекается больше неизвестных сил.
При вычислении моментов иногда бывает удобно разлагать данную силу на две составляющие и, пользуясь теоремой Вариньона, находить момент силы как сумму моментов этих составляющих.
Решение многих задач статики сводится к определению реакций опор, с помощью которых закрепляются балки, мостовые фермы и т. п.
studfiles.net
2.4. Система сходящихся сил. Условие равновесия системы сходящихся сил
Систему сил, линии действия которых пересекаются в одной точке, называют сходящейся.
Теорема: «Система сходящихся сил имеет равнодействующую, равную геометрической сумме этих сил и приложенную в точке пересечения их линий действия»
, (2.2)
где 
.
.
Геометрический способ сложения сил удобен и основан на построении силового многоугольника, замыкающая сторона которого и является равнодействующей данной системы сил.
Аналитический способ определения равнодействующей заключается в вычислении ее проекций на оси декартовой системы координат. Спроецируем векторное равенство (2.2) на оси x, y, z и воспользуемся теоремой, согласно которой проекция вектора суммы на какую-либо ось равна алгебраической сумме проекций слагаемых векторов на ту же ось. Отсюда проекции равнодействующей сходящейся системы сил на координатные оси запишем виде:
 =
= ;
; =
= ;
; =
= ,
(2.3)
,
(2.3)
при этом модуль равнодействующей
. (2.4)
Ее направляющие косинусы находим по формулам:
. (2.5)
Формулы (2.3)-(2.5) позволяют решить задачу о сложении сил аналитически.
Так как система сходящихся сил имеет равнодействующую, то для равновесия рассматриваемой системы необходимо и достаточно, чтобы равнодействующая была равна нулю
 .
(2.6)
.
(2.6)
В
этом случае силовой многоугольник
оказывается замкнутым, откуда следует геометрическое
условие равновесия сходящейся системы
сил: «Для
равновесия системы сходящихся сил
необходимо и достаточно, чтобы силовой
многоугольник, построенный на этих
силах, был замкнут».
Иными словами,
начало 1-го вектора системы сил  является концом последнего вектора
системы сил
является концом последнего вектора
системы сил .
.
Аналитические условия равновесия сходящейся системы сил следуют из выражения (2.6). Вместо одного векторного равенства (2.6) получаем три скалярных равенства, выражающие условия равновесия в аналитическом виде:
 ;
;  ;
; .
(2.7)
.
(2.7)
Таким образом, для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил системы на каждую из трех координатных осей были равны нулю. В случае плоской системы сходящихся сил используют два из трех равенств уравнений равновесия (2.7).
2. 5. Решение задач статики
В разделе статики, как правило, решают задачи, в которых известно, что тело находится в равновесии и нужно найти, чему при этом равны действующие на него как активные силы, так и реакции наложенных связей.
Решение задач статики производят по следующему плану:
1) выбрать объект равновесия, т.е. тело (или отдельную точку), равновесие которого будет рассмотрено далее;
2) освободить это тело от связей и изобразить действующие на него активные силы и реакции отброшенных связей;
3) записать условия равновесия для полученной системы сил, выбрать систему координат, заполнить вспомогательную таблицу;
4) решить систему алгебраических уравнений равновесия для определения искомых величин, проверить правильность решения и проанализировать полученные результаты.
Пример.ГрузQвесом 1 кН подвешен в точкеD, как показано на рис.2.5. Крепления стержней в точкахА, В, D –шарнирные.
Определить реакции опор А, В, С.
Решение
1) Объект равновесия – точка D.
2)
Груз Qдействует на точкуDс
силой .
Реакции отброшенных стержней:
.
Реакции отброшенных стержней:
3) Точка Dнаходится под действием системы пространственной сходящейся системы сил, аналитические условия равновесия которой:
 ;
;  ;
; .
.
Составим вспомогательную табл. 2.2.
Таблица 2.2
| | | | |
Pkx | 0 | RAcos45 | RBcos45 | 0 |
Pky | 0 | RAcos45cos30 | RBcos45cos30 | RCcos15 |
Pkz | –Q | RAcos45cos60 | RBcos45cos60 | RCsin15 |





4) Запишем систему алгебраических уравнений равновесия:

studfiles.net
Условия равновесия плоской системы сил — Мегаобучалка
Как было установлено в главе 4, необходимым и достаточным условием равновесия системы сил является равенство нулю главного вектора и главного момента. Для плоской системы сил эти условия получают вид
FО=∑Fk=0, МОz=∑ МОz(Fk)=0, (5.15) где О – произвольная точка в плоскости действия сил.
На основании (5.15) и (5.7) имеем
FОх=∑Fkх= F1х+ F2х … + Fпх=0,
FОу=∑Fkу= F1у+ F2у … + Fпу=0,
МОz=∑ МОz(Fk)= МОz(F1)+ МОz(F2)+ … + МОz(Fп)=0. (5.16) т.е. для равновесия плоской системы сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на две координатные оси и алгебраическая сумма моментов всех сил относительно произвольной точки равнялись нулю.
Возможны также другие формы уравнений равновесия.
Второй формой является равенство нулю алгебраических сумм моментов всех сил относительно любых трех точек, не лежащих на одной прямой:
∑ МАz(Fk)=0,
∑ МВz(Fk)=0,
∑ МСz(Fk)=0, (5.17)где А, В и С – указанные точки.
Необходимость выполнения этих трех равенств в случае равновесия системы сил вытекает из условия (5.15), и нам остается доказать их достаточность. Предположим, что все равенства (5.17) выполняются. Равенство нулю главного момента при центре приведения в точке А возможно, либо если система приводится к равнодействующей (R≠0) и линия ее действия проходит через точку А, либо R=0; аналогично равенство нулю главного момента относительно точек В и С означает, что либо R≠0 и равнодействующая проходит через обе точки, либо R=0. Но равнодействующая не может проходить через все эти три точки А, В и С (по условию они не лежат на одной прямой). Следовательно, равенства (5.17) возможны лишь при R=0, т.е. система сил находится в равновесии.
Заметим, что если точки А, В и С лежат на одной прямой, то выполнение условий (5.17) не будет достаточным условием равновесия, – в этом случае система может быть приведена к равнодействующей, линия действия которой проходит через эти точки.
Третьей формой уравнений равновесия плоской системы сил является равенство нулю алгебраических сумм моментов всех сил системы относительно двух любых точек и равенство нулю алгебраической суммы проекций всех сил системы на ось, не перпендикулярную прямой, проходящей через две выбранные точки:
∑ МАz(Fk)=0,
∑ МВz(Fk)=0,
∑ Fkх=0 (5.18) (ось х не перпендикулярна отрезку АВ).
Необходимость выполнения этих равенств для равновесия сил вытекает непосредственно из условий (5.15). Убедимся в том, что выполнение этих условий достаточно для равновесия сил.
Из двух равенств, как и в предыдущем случае, вытекает, что если система сил имеет равнодействующую, то ее линия действия проходит через точки А и В. Тогда проекция равнодействующей на ось х, не перпендикулярную отрезку АВ, оказывается отличной от нуля. Но эта возможность исключается третьим уравнением (так как Rх=∑ Fkх). Следовательно, равнодействующая должна равняться нулю и система находится в равновесии. Понятно, что если ось х будет перпендикулярна отрезку АВ, то уравнения (5.18) не будут достаточными условиями равновесия, так как в этом случае система может иметь равнодействующую, линия действия которой проходит через точки А и В.
Таким образом, система уравнений равновесия может содержать одно уравнение моментов и два уравнения проекций сил, либо два уравнения моментов и одно уравнение проекций, либо, наконец, три уравнения моментов.
Отметим, что при составлении любой из форм уравнений равновесия выбор координатных осей и точек, относительно которых берутся моменты сил, вообще говоря, произволен. Однако для получения более простых уравнений равновесия (каждое из которых содержит минимальное число неизвестных) целесообразно координатные оси проводить перпендикулярно неизвестным силам, а указанные точки выбирать на пересечении линий действия неизвестных сил.
При рассмотрении равновесия несвободного твердого тела на основании принципа освобождаемости заменяем действие связей их реакциями. Значит, если число заранее неизвестных реакций будет равно числу уравнений равновесия, в которых реакции входят, то задачу их определения можно выполнить. Если же число неизвестных реакций будет больше уравнений равновесия, то задача становится статически неопределенной.
Среди плоских задач статики особого рассмотрения заслуживает случай плоской системы параллельных сил. Хотя для этой системы главный вектор и главный момент по-прежнему определяются формулами (5.1) и (5.5), но вычисления значительно упрощаются.
Пусть линии действия всех сил параллельны оси у. Тогда уравнения равновесия для рассматриваемой системы параллельных сил будут
∑Fkу=0, ∑ МОz(Fk)=0. (5.19) В соответствии с (5.17) уравнения равновесия можно также записать в виде
∑ МАz(Fk)=0, ∑ МВz(Fk)=0, (5.20) причем точки А и В не должны лежать на прямой, параллельной оси у (если точки А и В будут лежать на прямой, параллельной оси у, то эти уравнения 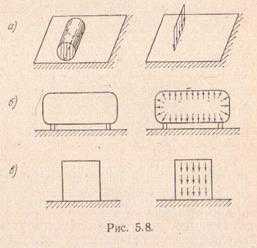 будут удовлетворяться при равнодействующей, отличной от нуля, если ее линия действия проходит через указанные точки).
будут удовлетворяться при равнодействующей, отличной от нуля, если ее линия действия проходит через указанные точки).
Система сил, действующих на твердое тело, может состоять как из сосредоточенных (изолированных) сил, так и распределенных сил. Различают силы, распределенные по линии, по поверхности и по объему тела. Так, например, давление тяжелого цилиндрического катка на горизонтальную опорную поверхность представляет собой силы, распределенные вдоль линии (в данном случае – вдоль прямой). Давление газа на стенки сосуда может служить примером сил, распределенных по поверхности. Действие сил тяжести иллюстрирует случай сил, распределенных по объему тела.
Распределенные силы задаются их интенсивностью. Так, например, для объемных сил сначала вводится понятие средней интенсивности силы в окрестности рассматриваемой точки тела
.
Здесь – объем элемента, выделенного в окрестности точки, – сила, действующая на этот элемент. Тогда
называется интенсивностью силы, распределенной по объему в данной точке тела.
Аналогично вводится понятие интенсивности для силы, распределенной по поверхности и по длине линии:
,
,
где , – соответственно элементарная площадь и элемент длины линии.
Очень часто интенсивность силы называют силой, отнесенной к соответствующей геометрической единице – длине, площади или объему. Соответственно этому единицами интенсивности служат Н/м3, Н/м2 и Н/м.
В простейших случаях интенсивность определяется простым делением полной силы давления на ее длину, площадь или объем участка ее приложения.
В ряде случаев силы оказываются равномерно распределенными. Так, давление воды на стенку плотины зависит от глубины, т.е. от координаты z. Давление сыпучего грунта на основание является функцией двух координат х и у из-за переменной толщины слоя.
megaobuchalka.ru
ЛЕКЦИЯ 4. 4.1. Условия равновесия плоской системы сил
Для равновесия произвольной плоской системы сил необходимо и достаточно чтобы ее главный вектор и главный момент были равны нулю, т.е.: R=0, Мо=0.
Существуют три формы записи условия равновесия плоской системы сил.
| 1. Для равновесия плоской системы сил необходимо и достаточно, чтобы суммы проекций этих сил на каждую координатную ось, а также сумма их моментов относительно любого центра, находящегося в этой же плоскости, были равны нулю. В статике систему (4.3) можно рассматривать следующим образом: первые два уравнения устанавливают отсутствие поступательного, а последнее — углового перемещения тела. |
 |
| 2. Для равновесия плоской системы сил необходимо и достаточно, чтобы суммы их моментов относительно двух произвольно выбранных центров A и B, и сумма проекций всех сил на ось x, не перпендикулярную в прямой, проходящей через эти центры, были равны нулю. |  |
| 3. Для равновесия плоской системы сил необходимо и достаточно, чтобы суммы их моментов относительно трех центров, не лежащих на одной прямой, были равны нулю. Если использование первой формы записи условия равновесия (4.3) не требует никаких ограничений, то для остальных двух, (4.4) и (4.5), такие ограничения имеют место. Это связано с возможностью прохождения линии действия главного вектора через произвольно выбранные |

|
центры, относительно которых записаны уравнения равновесия.
Задача о равновесии системы сил может иметь две постановки: прямую и обратную.
Прямая: будет ли заданная система сил являться уравновешенной.
Обратная: найти неизвестные силы, входящие в данную уравновешенную систему
Сил.
Похожие статьи:
poznayka.org
Условия равновесия системы сходящихся сил
Пусть на свободное твердое тело действует система сходящихся сил (F1, F2, … FN). Сложив по правилу силового многоугольника N-1 этих сил, приведем данную систему сходящихся сил к системе двух сил (R1, FN).
Но, по первой аксиоме, две силы R1 и FN приложенные к твердому телу, эквивалентны нулю, т.е. находятся в равновесии только в том случае, когда они имеют равные модули и направлены по одной прямой в противоположные стороны, т.е. если их равнодействующая R*= R1 + FN равна нулю.
Следовательно, для равновесия системы сходящихся сил необходимо и достаточно, чтобы равнодействующая этой системы сил равнялась нулю, т.е.
R* = ∑ Fk = 0. (6)
Это векторное условие равновесия системы сходящихся сил.
Так как равнодействующая R* изображается вектором, замыкающим силовой многоугольник, то геометрически условие равновесия системы сходящихся сил означает, что силовой многоугольник, построенный на векторах слагаемых сил данной системы, замкнут.
Выразим теперь это условие аналитически. Из предыдущего параграфа известно, что модуль равнодействующей системы сходящихся сил определяется по формуле
Но при равновесии R*= 0, а следовательно равно нулю и подкоренное выражение формулы (2). Поскольку под знаком корня стоит сумма положительных чисел, то R* может равняться нулю только в случае, если каждое из этих слагаемых равно нулю в отдельности, т.е.
∑Fkx = 0, ∑Fky = 0 , ∑Fkz = 0 . (8)
Таким образом, для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на каждую из трех выбранных любым образом координатных осей равнялись нулю.
Имея плоскую систему сходящихся сил, всегда можно плоскость, в которой расположены силы, принять за координатную плоскость хОу. Тогда третье условие в формулах (8) выполняется тождественно, и условия равновесия, в рассматриваемом случае, сведутся к двум следующим условиям:
∑Fkx = 0, ∑Fky = 0. (9)
Т.е., для равновесия плоской системы сходящихся сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на каждую из двух выбранных любым образом координатных осей, лежащих в плоскости действия сил данной системы, равнялись нулю.
>> Равновесие пространственной системы сходящихся сил
isopromat.ru