Связь в виде шарнирно подвижной опоры
⇐ ПредыдущаяСтр 7 из 9Следующая ⇒
Пример 1,плоский случай. Тело (брус) опирается на опорную поверхность не непосредственно, а через цилиндрический шарнир, поставленный на катки (рис. 23 а, б). Такая опора препятствует перемещению тела только в направлении, перпендикулярном опорной поверхности катков (вдоль опорной поверхности шарнир вместе с прикрепленным к нему телом может перемещаться).
| а) | б) | в) | г) |
| Рис. 23 |
Из-за сравнительно большой подвижности катка трением пренебрегают и поэтому: реакция связи шарнирно-подвижной опоры направлена перпендикулярно опорной поверхности
На рисунке 23 б, в и г дано условное обозначение шарнирно-подвижной опоры.
Пример 2, пространственный случай.Подвижная сферическая шарнирная опора (рис. 24) допускает поворот тела в любом направлении в пространстве, а ее основание подвижно и может находиться на цилиндрических или сферических катках.
Тело имеет возможность перемещаться в плоскости, параллельной основанию, но не может перемещаться перпендикулярно основанию, так как нарушится связь. Поэтому реакция такой опоры RАнаправлена перпендикулярно плоскости ее подвижного основания.
Таким образом, направление реакции будет известно, а её величина неизвестна. Расположим оси координат x и y в плоскости основания опоры, а ось z перпендикулярно к ней, тогда из проекций реакции опоры RА
на оси координат неизвестной будет только одна проекция| ZА = RА ≠ 0; XА = YА = 0. | |
| Рис.24 |
Гибкая связь
Связь, осуществляемая посредством нити, троса, цепи, веревки и т.п. называется гибкой связью.
К категории гибкой нити относятся не только текстильные нити, но также тросы, цепи, канаты, веревки, лески. Все перечисленные тела обладают одинаковым свойством – они не способны работать на сжатие и могут выдерживать нагрузку на растяжение, при этом реакция гибкой нити называется силой её натяжения.
Направление реакций гибких тел совпадает с их положением и направлено в сторону, противоположную приложенной к телу силе.
Реакция гибкой связи направлена вдоль этой связи к точке подвеса. Гибкая связь может работать только на растяжение.
Пример 1.Если к концу В нити АВ (рис. 25), прикрепленной в точке А, подвесить груз весом G, то реакция нити S будет приложена к грузу в точке В, равная по модулю его весу G и направлена вертикально вверх (не дает телу удаляться от точки подвеса нити по направлению нити).
Рис. 25
Пример 2. Реакции гибких связей RАи RВ (рис. 26) направлены вдоль связей.Рис. 26
Пример 3. Особый вид связи образуется между ремнем и шкивами в механизме передачи вращения от ведущего вала к ведомому. В отличие от обычных «жестких» связей ремень образует «гибкую» связь, изменяя свою линейную форму при работе.
Реакции в ветвях ремня направлены соответственно вдоль ремней (рис. 27), причем реакция верхней ведущей ветви приблизительно в два раза больше реакции нижней холостой ветви.
Рис. 27
Идеальный блок
Рассмотрим свойства идеального блока (рис. 28). Блок может быть использован только в паре с гибкой нитью, перекинутой через него.
Нить закреплена в точке А, а в точке D к ней приложена сила Р. Когда пренебрегают трением в оси колеса блока и гибкой нити об это колесо, идеальный блок не изменяет величину натяжения нити на участках АВ и СD. Направление реакций на участках АВ и СD совпадает с направлением этих линий. Таким образом, при рассмотрении равновесия тела (шарнирной опоры А) следует мысленно отбросить блок вместе с приложенной нему силой Р при помощи рассечения нити на участке АВ, заменив механическое действие блока силой Ра
Рис. 28
Итак:идеальный блок не изменяет величины натяжения блока, он изменяет направление передаваемого усилия (натяжения нити).
Двухсторонние связи(1 группа)
К этой группе можно отнести следующие, часто встречающиеся в практических задачах связи:
– невесомые твердые стержни;
– скользящую заделку.
Конструкция двухсторонних связей определяет положение линии действия реакции, а её модуль и направление вдоль линии действия остаются неизвестными. Примерами таких связей могут служить невесомые стержни в опорах или фермах (рис. 29) и скользящая заделка.
Рис. 29
Рекомендуемые страницы:
lektsia.com
3.3.2 Примеры свободного опирания тела о связь (точечная опора, опора на ребро, опора на острие)
Пример 1. Балка весом G в точке В опирается на гладкую полусферу; в точках А и Д – на гладкие горизонтальную и вертикальную плоскости (рис. 16). В этом случае реакции полусферы, пола и стены будут иметь указанные на рисунке направления.
П
Рис. 3.8
ример 2. При опирании тела своим ребром о гладкую криволинейную поверхность реакция связи (RA) направлена перпендикулярно касательной к поверхности (рис. 17). 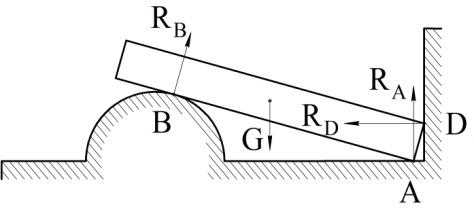
Пример 3. При опирании тела о ребро связи (рис. 18) или острие связи (рис. 19) своей гладкой поверхностью (плоской или криволинейной) реакция связи направлена перпендикулярно поверхности тела (RВ) или касательной к поверхности тела (RС).
Рис. 18 Рис. 19
Пример 4. При опирании гладкой поверхности тела о гладкую поверхность связи реакция связи направлена перпендикулярно общей касательной обеих поверхностей (RD и RE, рис. 20 и рис. 21).
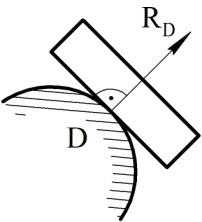
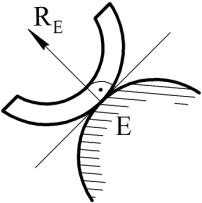
Рис. 20 Рис. 21
Пример 5. На тело кругового очертания реакция связи R1 и R2 действует в радиальном направлении. Такие реакции получают, например, фрикционные диски кругового опрокидывателя вагонеток со стороны роликовых опор (рис. 22).
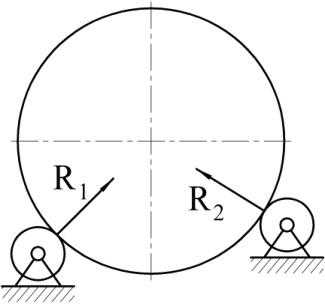
Рис. 22
3.3.3 Связь в виде шарнирно подвижной опоры
Пример 1, плоский случай. Тело (брус) опирается на опорную поверхность не непосредственно, а через цилиндрический шарнир, поставленный на катки (рис. 23 а, б). Такая опора препятствует перемещению тела только в направлении, перпендикулярном опорной поверхности катков (вдоль опорной поверхности шарнир вместе с прикрепленным к нему телом может перемещаться).
а) | б) | в) | г) |
| | | |
Рис. 23 | |||
Из-за сравнительно большой подвижности катка трением пренебрегают и поэтому: реакция связи шарнирно-подвижной опоры направлена перпендикулярно опорной поверхности.
На рисунке 23 б, в и г дано условное обозначение шарнирно-подвижной опоры.
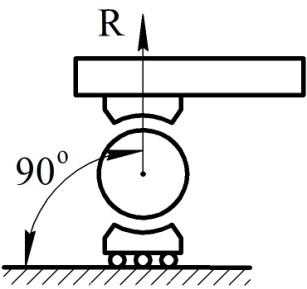
Пример 2, пространственный случай. Подвижная сферическая шарнирная опора (рис. 24) допускает поворот тела в любом направлении в пространстве, а ее основание подвижно и может находиться на цилиндрических или сферических катках.
Тело имеет возможность перемещаться в плоскости, параллельной основанию, но не может перемещаться перпендикулярно основанию, так как нарушится связь. Поэтому реакция такой опоры RА направлена перпендикулярно плоскости ее подвижного основания.
Таким образом, направление реакции будет известно, а её величина неизвестна. Расположим оси координат x и y в плоскости основания опоры, а ось z перпендикулярно к ней, тогда из проекций реакции опоры RА на оси координат неизвестной будет только одна проекция
ZА = RА ≠ 0; XА = YА = 0.
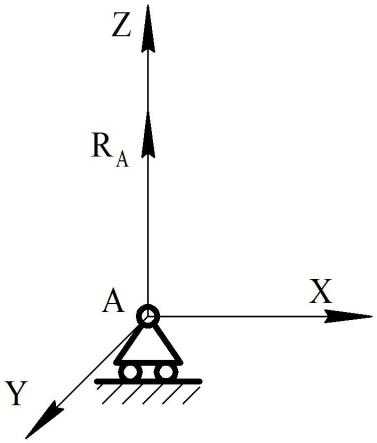
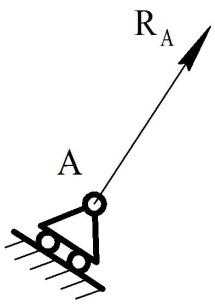
Рис.24
3.3.4 Гибкая связь
Связь, осуществляемая посредством нити, троса, цепи, веревки и т.п. называется гибкой связью.
К категории гибкой нити относятся не только текстильные нити, но также тросы, цепи, канаты, веревки, лески. Все перечисленные тела обладают одинаковым свойством – они не способны работать на сжатие и могут выдерживать нагрузку на растяжение, при этом реакция гибкой нити называется силой её натяжения.
Направление реакций гибких тел совпадает с их положением и направлено в сторону, противоположную приложенной к телу силе.
Реакция гибкой связи направлена вдоль этой связи к точке подвеса. Гибкая связь может работать только на растяжение.
Пример 1. Если к концу В нити АВ (рис. 25), прикрепленной в точке А, подвесить груз весом G, то реакция нити S будет приложена к грузу в точке В, равная по модулю его весу G и направлена вертикально вверх (не дает телу удаляться от точки подвеса нити по направлению нити).
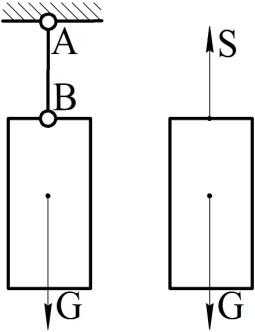
Рис. 25
П ример 2. Реакции гибких связей RА и RВ (рис. 26) направлены вдоль связей.
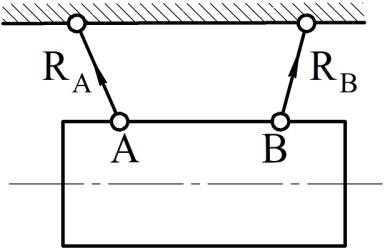
Рис. 26
Пример 3. Особый вид связи образуется между ремнем и шкивами в механизме передачи вращения от ведущего вала к ведомому. В отличие от обычных «жестких» связей ремень образует «гибкую» связь, изменяя свою линейную форму при работе.
Реакции в ветвях ремня направлены соответственно вдоль ремней (рис. 27), причем реакция верхней ведущей ветви приблизительно в два раза больше реакции нижней холостой ветви.
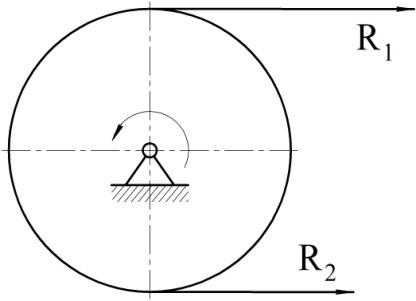
Рис. 27
studfiles.net
Подвижный шарнир. Связи и их реакции
Базовый курс лекций по сопромату, теория, практика, задачи.
3. Изгиб. Определение напряжений.3.2. Типы опор балок.
Опоры балок, рассматриваемых как плоские системы, бывают трех основных типов.
1. Подвижная шарнирная опора (рис. 3.2, а). Такая опора не препятствует вращению конца балки и его перемещению вдоль плоскости качения. В ней может возникать только одна реакция, которая перпендикулярна плоскости качения и проходит через центр катка.
Схематичное изображение подвижной шарнирной опоры дано на рис. 3.2, б.
Подвижные опоры дают возможность балке беспрепятственно изменять свою длину при изменении температуры и тем самым устраняют возможность появления температурных напряжений.
2. Неподвижная шарнирная опора (рис. 3.2, в). Такая опора допускает вращение конца балки, но устраняет поступательное перемещение ее в любом направлении. Возникающую в ней реакцию можно разложить на две составляющие — горизонтальную и вертикальную.
3. Жесткая заделка, или защемление (рис. 3.2, г). Такое закрепление не допускает ни линейных, ни угловых перемещений опорного сечения. В этой опоре может в общем случае возникать реакция, которую обычно раскладывают на две составляющие (вертикальную и горизонтальную) и момент защемления (реактивный момент).
Балка с одним заделанным концом называется консольной балкой или просто консолью.
Если опорные реакции могут быть найдены из одних уравнений статики, то балки называют статически определимыми. Если же число неизвестных опорных реакций больше, чем число уравнений статики, возможных для данной задачи, то балки называют статически неопределимыми. Для определения реакций в таких балках приходится составлять дополнительные уравнения — уравнения перемещений.
рис. 17, г ) и пары сил с алгебраическим моментомМ A (рис. 17,б )
или М В (рис. 17,в, г ).
Скользящая заделка схематически изображается так, как показано на рис. 18.
1.1.9. Бискользящая заделка
Бискользящая заделка представляет собой такую связь, которая препятствует телам взаимно поворачиваться, при этом сохраняется возможность любого движения в плоскости этой заделки, и, следовательно, эта связь осуществляет две степени свободы тела. Пример такой связи – крестовина (рис. 19, а ). Реакция бискользящей заделки сводится к паре сил с алгебраическим моментомМ A (рис. 19,б, г ).
Схематически бискользящая заделка изображается так, как показано на рис. 19, в .

1.1.7. Шероховатая поверхность
Шероховатость поверхности специально оговаривается в условии задачи.
Реакция такой связи заранее не известна по направлению,
поэтому её раскладывают на две составляющие: нормальную N
и касательную (силу трения скольжения F тр ) (рис. 20), т. е.
R N F тр . МодулиN иF тр определяются из соответствую-
щих условий равновесия. Сила трения скольжения направляется в сторону, противоположную возможному перемещению тела по поверхности.
F тр
Величина силы трения определяется по формуле
0 F | F max , где | Fmax f N. |
Величина f (коэффициента трения) либо задается в задаче, либо является искомой величиной.
1.2. СВЯЗИ, ИСПОЛЬЗУЕМЫЕ
В ПРОСТРАНСТВЕННЫХ КОНСТРУКЦИЯХ ЗАДАЧ СТАТИКИ
1.2.1. Сферический (шаровой) шарнир. Подпятник
Сферический шарнир позволяет соединяемым телам совершать пространственные взаимные вращения вокруг центра шарнира. Реакция такого шарнира проходит через его центр и может иметь любое направление в пространстве. При решении задач реакцию сферического шарнира представляют в виде трёх составляющих, направленных вдоль координатных осей декартовой системы координат (рис. 21).
При этом типе связи тело обладает тремя степенями свободы – возможностью вращения вокруг трёх осей x, y, z, при запрете перемещения центра шарнира.
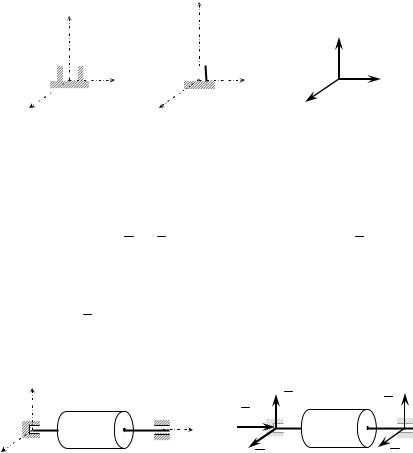
Подпятник (рис. 22, а, б ) представляет собой соединение цилиндрического шарнира с опорной плоскостью. Такая связь позволяет вращаться валу (цилиндру) вокруг его оси и перемещаться вдоль неё, но только в одном направлении.
Реакция подпятника (рис. 22, в ) складывается из реакции цилиндрического подшипника, лежащей в плоскости, перпендикулярной к его оси (в общем случае она может быть разложена на составляющиеX B ,Y B ) и нормальной реакцииZ B опорной плоскости.
Аналогичным способом направляются и реакции упорного подшипника
starer.ru
Шарнирно-подвижная опора
Связи и их реакции.
Тело, которое не скреплено с другими телами и может совершать из данного положения любые перемещения в пространстве, называется свободным. Тело, перемещениям которого в пространстве препятствуют какие-нибудь другие, скрепленные или соприкасающиеся с ним тела, называется несвободным. Все то, что ограничивает перемещение данного тела в пространстве, будем называть связью.
Примерами несвободных тел является груз, лежащий на столе, дверь, подвешенная на петлях, и т. п. Связями в этих случаях будут: для груза – плоскость стола, не дающая грузу перемещаться по вертикали вниз; для двери – петли, не дающие двери отойти от косяка. Сила, с которой данная связь действует на тело, препятствуя тем или иным его перемещениям, называется силой реакции связи или просто реакцией связи. Направлена реакция связи в сторону, противоположную той, куда связь не дает перемещаться телу. Правильное определение направлений реакций связей играет при решении задач статики очень важную роль. Рассмотрим поэтому подробнее, как направлены реакции некоторых основных видов связей.
1.Гладкая плоскость (поверхность) или опора.
Гладкой будем называть поверхность, трением о которую можно пренебречь. Такая поверхность не дает телу перемещаться только по направлению общего перпендикуляра к поверхности соприкасающихся тел. Поэтому реакция R гладкой поверхности или опоры направлена по общей нормали к поверхности соприкасающихся тел в точке их касания и приложена в этой точке (рис. 6). Рисунок 6
R1 R
R2
.
2. Гибкая связь.
Связь, осуществленная в виде гибкой нерастяжимой нити, не дает телу М удаляться от точки подвеса нити по направлению АМ. Поэтому реакция R натянутой нити направлена вдоль нити к точке ее подвеса (рис. 7).
R
3. Стержневая связь.
Нагруженный на концах стержень, весом которого можно пренебречь, работает только на растяжение или сжатие. Если такой стержень является связью, то реакция N стержня будет направлена вдоль оси стержня. Примеры стержневой связи можно увидеть в конструкциях линий электропередач, строительных ферм и т. п.
A
RAB
C B
RBC P
Рисунок 8.
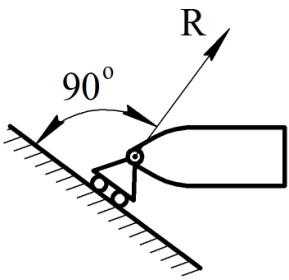
4. Шарнирно-подвижная опора.
Этот вид опоры допускает поворот вокруг оси шарнира и линейное перемещение параллельно опорной плоскости. Если пренебречь трением на опоре и в шарнире, то реакция такой связи будет направлена перпендикулярно опорной плоскости.
Возникает одна опорная реакция связи RA, направленная перпендикулярно плоскости опирания.
5. Шарнирно-неподвижная опора.
Допускает только поворот вокруг оси шарнира и не допускает никаких линейных перемещений. Обычно при решении задач реакцию этой опоры разлагают на две взаимно перпендикулярные составляющие, неизвестные по модулю, но известные по направлению.
studlib.info
Шарнирно-подвижная опора — Большая Энциклопедия Нефти и Газа, статья, страница 1
Шарнирно-подвижная опора
Cтраница 1
Шарнирно-подвижная опора ( рис. 104, а), которая допускает поворот сечения балки над опорой и поступательное перемещение вдоль опорной поверхности. Схематическое изображение такой опоры показано на рис. 104, б, опорная реакция в этом случае направлена перпендикулярно плоскости опирания катков. [1]
Шарнирно-подвижная опора имеет одну, шарнирно-неподвижная — две, а жестко закрепленная — три связи. Каждой связи, приложенной в опоре, соответствует опорная реакция, направленная по направлению действия связи. [2]
Шарнирно-подвижная опора налагает на конец балки только одну связь-она не дает возможности перемещаться концу балки в направлении, перпендикулярном к оси балки. Следовательно, шарнирно-подвижная опора дает лишь одну реакцию, неизвестную по величине, но известную по направлению. [3]
Шарнирно-подвижная опора ( рис. 5.1, б — левая опора балки), ограничивающая лишь вертикальное перемещение опорного узла. [4]
Шарнирно-подвижная опора представляет собой видоизменение свободного опирания. [5]
Шарнирно-подвижная опора ( односвязная опора) схематически изображается, как показано на рис. 1.10 о. Реакция такой опоры всегда перпендикулярна опорной поверхности. [6]
Шарнирно-подвижная опора допускает, помимо поворотов, также свободное перемещение в соответствующем направлении ( фиг. Таким образом, рассматриваемая опора препятствует лишь перемещению, перпендикулярному к определенному направлению. В соответствии с этим реакция такой опоры проходит через центр шарнира и направлена перпендикулярно к линии свободного перемещения опоры — обычно оси балки. Шарнирно-подвижная опора дает лишь одну неизвестную реакцию В. [7]
Шарнирно-подвижная опора — опора, позволяющая точке тела, которая связана с опорой, перемещаться без трения вдоль какой-ли — Оо поверхности. Реакция подвижной опоры направляется по нормали к поверхности, вдоль которой может перемещаться опора. Обозначают реакцию такой связи обычно векторами R или N. Условные обозначения подвижных опор на чертежах к задачам и конструктивное выполнение подвижных опор t рис. 2.7) может быть весьма различным. [8]
Шарнирно-подвижная опора допускает поворот вокруг оси шарнира и линейное перемещение параллельно опорной плоскости. [9]
Шарнирно-подвижная опора допускает поворот вокруг оси шарнира и линейное перемещение параллельно опорной плоскости. [10]
Цилиндрическая шарнирно-подвижная опора ( рис. 1.19 6) препятствует перемещению закрепленной точки тела по перпендикуляру к плоскости / — /; соответственно реакция такой опоры также имеет направление этого перпендикуляра. [11]
Шарнирно-подвижной опорой можно считать концевой подшипник вала, если его длина меньше или равна диаметру вала. [13]
Конструкции шарнирно-подвижных опор разнообразны: отверстия для штырей делаются овальными, что позволяет балке при деформациях перемещаться по плите; плита устанавливается на цилиндрические катки. [14]
Условное обозначение шарнирно-подвижной опоры согласно ГОСТ 2.770 — 68 показано на рис. 1.15, в, г. Шарнирно-иеподвижная опора ( рис. 1.16) дает возможность телу свободно поворачиваться около шарнира, но препятствует поступательному перемещению тела в любом направлении, перпендикулярном оси шарнира. [15]
Страницы: 1 2 3 4
www.ngpedia.ru
Соединение тел с помощью шарниров
Слушатели курса «Расчет строительных конструкций — с нуля! «, который я веду в проекте Dystlab Education, периодически просят меня объяснить им такие понятия, как «шарнир», «шарнирная опора». Видимо, понимание этих важных, с точки зрения работы сооружения, элементов вызывает у начинающих проектантов некоторые трудности.
Различные словари и вики определяют шарнир как «вращательную кинематическую пару», что терминологически больше относится к машиностроению (элементам машин и механизмов), нежели к строительным конструкциям, хотя принцип действия шарнира везде одинаковый. Шарнир — устройство, которое соединяет два элемента таким образом, чтобы они могли вращаться относительно одной точки или оси.
Различные схемы применения шарниров продемонстрированы в следующих видео. В первом видео, шарниры применяются для оконных и дверных систем, во втором — для гиростабилизации камеры (используется не один, а несколько шарниров):
Видео 1. Примеры шарнирных петель
Видео 2. Шарниры в составе сложного механизма
Из этих роликов должна стать понятной сама концепция: шарнир нужен там, где не требуется жестко фиксировать элемент, а нужно дать ему возможность вращаться.
Шарниры в строительных конструкциях
В зданиях и сооружениях шарниры применяются, как правило, в наиболее ответственных узлах — опорах. Иногда шарниры внедряют в какую-то «внутреннюю» часть конструкции:

Опорная часть пролетного строения моста

Крепление каната на временных опорах — тоже шарнирное

Шарнир как часть несущей конструкции в здании гражданского назначения

Пешеходный мост, реализованный по схеме «трехшарнирная арка» (редкая конструкция!)

Шарнирная опора аттракциона «колесо обозрения»
Шарниры в расчетных схемах
Так или иначе, проектирование конструкции начинается с разработки ее расчетной схемы . Рассмотрим несколько примеров простейших расчетных схем:
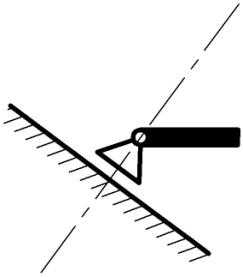
Рисунок 1. Примеры расчетных схем с шарнирными опорами
Удивляет вас это или нет, но на всех трех схемах изображен один и тот же тип опирания конструкции — шарнирное. Обратите внимание, что левая опора в каждой схеме «повернута» на какой-то угол. Это сделано лишь с целью подчеркнуть, что сейчас мы работаем не с реальной конструкцией, а с её виртуальным аналогом, упрощенной моделью (расчетной схемой). А на расчетной схеме важно отметить только те особенности, которые принципиально влияют на работу конструкции: в данном случае это два опорных стержня, которыми конструкция крепится к земле.
Вот еще пример расчетной схемы, взятый из пояснительной записки проекта путепровода 1905 года:
Рисунок 2. Шарнирно-опертая балка, проект 1905 г.
Справа (фиг. 8, рис. 2) показана простая балка на двух опорах, а черными треугольниками показаны шарнирно-подвижная и шарнирно-неподвижная опоры (правда, сложно узнать где какая, но это уже вопрос к авторам проекта, инженерам Е. О. Патону и П. Я. Каменцеву). Как видим, единого правильного варианта в обозначении шарнирной опоры нет, и как этот элемент показывать на схемах — решать вам.
Что означает кружок
Как легко убедиться, на схемах шарнир символизирует маленький кружок. Вокруг этого центра происходит вращение опорного сечения конструкции:
Рисунок 3. Сечения конструкции A, B вращаются при изгибе вокруг шарнирных опор
Перемещения и реакции
Шарнир допускает вращение сечения вокруг своего центра. Поскольку в этой точке разрешены угловые перемещения, то соответствующий опорный момент отсутствует. В этом состоит основное назначение шарнира в строительной конструкции — обнулять моменты, появляющиеся в процессе изгиба:
Рисунок 4. Жесткое защемление (1) и шарнирное опирание (2) балки
В чем разница между подвижной и неподвижной опорами?
Вы наверняка обратили внимание, что на рисунках 1, 3, 4 балки лежат на разных опорах: слева опора нарисована тремя кружка ми и двумя соединительными линиями, а справа — двумя кружка ми и одной линией. Почему так?
Каждая соединительная линия (короткий отрезок в изображении опоры) моделирует крепление данного узла к земле, поэтому линейные перемещения балки в этом направлении запрещены. Так, балка не может прогибаться вниз в опорных сечениях; и в начале, и в конце конструкции нарисованы вертикальные или наклонные стержни, поддерживающие балку. Напомню, что наклонную конструкцию всегда можно спроецировать на взаимно перпендикулярные оси (вертикальную и горизонтальную), поэтому схема 2 на рисунке 1 принципиально не отличается от остальных.
Важно также понимать назначение единственного горизонтального опорного стержня. Он запрещает горизонтальное перемещение балки (в направлении продольной оси), но только того сечения, в котором он установлен. Это классическая шарнирно-неподвижная опора:
Рисунок 5. Какие перемещения запрещают и разрешают шарнирные опоры
На рисунке 5 правая опора называется шарнирно-подвижной, так как допускает смещение правого конца балки в горизонтальном направлении. Это важное обстоятельство для учета удлинений и укорочений конструкции вследствие, например, температурных колебаний.
Выводы
Шарнир является важным элементом конструкции: он позволяет сечениям, которые к нему прикреплены, вращаться вокруг оси шарнира. Шарнир обнуляет опорные моменты.
На расчетной схеме шарнир показывают, как правило, кружком. Шарнирно-подвижная и шарнирно-неподвижная опоры являются одним из самых распространенных типов опирания балочных систем. Обе они имеют шарниры и допускают поворот опорного сечения, а шарнирно-подвижная опора допускает также горизонтальные перемещения соответствующего конца балки.
Принято говорить, что опоры крепятся «к земле», однако не следует понимать это буквально. Нередко «землей» служит другой элемент конструкции, большей жесткости.
Из-за сравнительно большой подвижности катка трением пренебрегают и поэтому: реакция связи шарнирно-подвижной опоры направлена перпендикулярно опорной поверхности .
На рисунке 23 б , в и г дано условное обозначение шарнирно-подвижной опоры.
Пример 2 , пространственный случай .Подвижная сферическая шарнирная опора (рис. 24) допускает поворот тела в любом направлении в пространстве, а ее основание подвижно и может находиться на цилиндрических или сферических катках.
Тело имеет возможность перемещаться в плоскости, параллельной основанию, но не может перемещаться перпендикулярно основанию, так как нарушится связь. Поэтому реакция такой опоры R А направлена перпендикулярно плоскости ее подвижного основания .
Таким образом, направление реакции будет известно, а её величина неизвестна. Расположим оси координат x и y в плоскости основания опоры, а ось z перпендикулярно к ней, тогда из проекций реакции опоры R А на оси координат неизвестной будет только одна проекция
| Z А = R А ≠ 0; X А = Y А = 0. | |
| Рис.24 |
Гибкая связь
Связь, осуществляемая посредством нити, троса, цепи, веревки и т.п. называется гибкой связью.
К категории гибкой нити относятся не только текстильные нити, но также тросы, цепи, канаты, веревки, лески. Все перечисленные тела обладают одинаковым свойством – они не способны работать на сжатие и могут выдерживать нагрузку на растяжение, при этом реакция гибкой нити называется силой её натяжения.
Направление реакций гибких тел совпадает с их положением и направлено в сторону, противоположную приложенной к телу силе.
Реакция гибкой связи направлена вдоль этой связи к точке подвеса. Гибкая связь может работать только на растяжение.
Пример 1 .Если к концу В нити АВ (рис. 25), прикрепленной в точке А , подвесить груз весом G , то реакция нити S будет приложена к грузу в точке В , равная по модулю его весу G и направлена вертикально вверх (не дает телу удаляться от точки подвеса нити по направлению нити).
Рис. 25
Пример 2 . Реакции гибких связей R А и R В (рис. 26) направлены вдоль связей.Рис. 26
Пример 3. Особый вид связи образуется между ремнем и шкивами в механизме передачи вращения от ведущего вала к ведомому. В о
starer.ru
Связь в виде шарнирно подвижной опоры
Пример 1,плоский случай. Тело (брус) опирается на опорную поверхность не непосредственно, а через цилиндрический шарнир, поставленный на катки (рис. 23 а, б). Такая опора препятствует перемещению тела только в направлении, перпендикулярном опорной поверхности катков (вдоль опорной поверхности шарнир вместе с прикрепленным к нему телом может перемещаться).
| а) | б) | в) | г) |
| Рис. 23 |
Из-за сравнительно большой подвижности катка трением пренебрегают и поэтому: реакция связи шарнирно-подвижной опоры направлена перпендикулярно опорной поверхности.
На рисунке 23 б, в и г дано условное обозначение шарнирно-подвижной опоры.
Пример 2, пространственный случай.Подвижная сферическая шарнирная опора (рис. 24) допускает поворот тела в любом направлении в пространстве, а ее основание подвижно и может находиться на цилиндрических или сферических катках.
Тело имеет возможность перемещаться в плоскости, параллельной основанию, но не может перемещаться перпендикулярно основанию, так как нарушится связь. Поэтому реакция такой опоры RАнаправлена перпендикулярно плоскости ее подвижного основания.
Таким образом, направление реакции будет известно, а её величина неизвестна. Расположим оси координат x и y в плоскости основания опоры, а ось z перпендикулярно к ней, тогда из проекций реакции опоры RА на оси координат неизвестной будет только одна проекция
| ZА = RА ≠ 0; XА = YА = 0. | |
| Рис.24 |
Гибкая связь
Связь, осуществляемая посредством нити, троса, цепи, веревки и т.п. называется гибкой связью.
К категории гибкой нити относятся не только текстильные нити, но также тросы, цепи, канаты, веревки, лески. Все перечисленные тела обладают одинаковым свойством – они не способны работать на сжатие и могут выдерживать нагрузку на растяжение, при этом реакция гибкой нити называется силой её натяжения.
Направление реакций гибких тел совпадает с их положением и направлено в сторону, противоположную приложенной к телу силе.
Реакция гибкой связи направлена вдоль этой связи к точке подвеса. Гибкая связь может работать только на растяжение.
Пример 1.Если к концу В нити АВ (рис. 25), прикрепленной в точке А, подвесить груз весом G, то реакция нити S будет приложена к грузу в точке В, равная по модулю его весу G и направлена вертикально вверх (не дает телу удаляться от точки подвеса нити по направлению нити).
Рис. 25
Пример 2. Реакции гибких связей RАи RВ (рис. 26) направлены вдоль связей.Рис. 26
Пример 3. Особый вид связи образуется между ремнем и шкивами в механизме передачи вращения от ведущего вала к ведомому. В отличие от обычных «жестких» связей ремень образует «гибкую» связь, изменяя свою линейную форму при работе.
Реакции в ветвях ремня направлены соответственно вдоль ремней (рис. 27), причем реакция верхней ведущей ветви приблизительно в два раза больше реакции нижней холостой ветви.
Рис. 27
Идеальный блок
Рассмотрим свойства идеального блока (рис. 28). Блок может быть использован только в паре с гибкой нитью, перекинутой через него.
Нить закреплена в точке А, а в точке D к ней приложена сила Р. Когда пренебрегают трением в оси колеса блока и гибкой нити об это колесо, идеальный блок не изменяет величину натяжения нити на участках АВ и СD. Направление реакций на участках АВ и СD совпадает с направлением этих линий. Таким образом, при рассмотрении равновесия тела (шарнирной опоры А) следует мысленно отбросить блок вместе с приложенной нему силой Р при помощи рассечения нити на участке АВ, заменив механическое действие блока силой Ра, направленной вдоль участка АВ в сторону отброшенной части, по величине равной данной силе Р.
Рис. 28
Итак:идеальный блок не изменяет величины натяжения блока, он изменяет направление передаваемого усилия (натяжения нити).
Двухсторонние связи(1 группа)
К этой группе можно отнести следующие, часто встречающиеся в практических задачах связи:
– невесомые твердые стержни;
– скользящую заделку.
Конструкция двухсторонних связей определяет положение линии действия реакции, а её модуль и направление вдоль линии действия остаются неизвестными. Примерами таких связей могут служить невесомые стержни в опорах или фермах (рис. 29) и скользящая заделка.
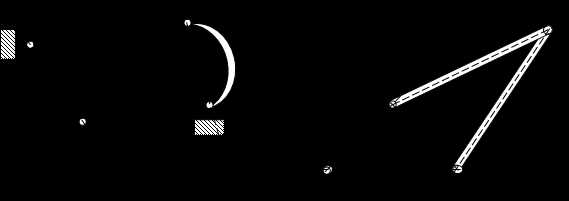
Рис. 29
Читайте также:
- C. Изособида динитрат в виде спрея в рот
- III. Половая связь – лишь как конечное завершение глубокой всесторонней симпатии и привязанности к объекту половой любви.
- IX.19. Ясновидение и яснослышание
- А прилежный человек, увидев льва на улице, не станет кричать об этом, а пойдет к своей цели другим путем, той дорогой, где льва нет.
- Авторское видение роли специалиста по ОРМ в обеспечении социальной безопасности молодежи: итоги авторских исследований, проектов, модели.
- Активные и пассивные операции коммерческого банка, их взаимосвязь.
- Аннотирование лекций, кино-, видео– и компьютерных материалов
- Аннулирование или сокращение преимуществ: причинная связь.
- Биомеханический видеоанализ комплекса движений спортсменов в пауэрлифтинге
- Биообратная связь: современное направление йоги
- Бывало так, что мы видели молодой месяц, потом ещё один (, и за всё это время) в домах посланника Аллаха, да благословит его Аллах и да приветствует, не пекли хлеба».
- Быть открытым и быть свидетелем – две разные вещи. Это действительно так, или же эта дуальность – порождение моего ума.
lektsia.info