| Различные формы условий равновесия плоской системы сил
,
имеем три уравнения равновесия:
Рис.16
Для плоской системы параллельных сил (Рис. 17) имеем лишь два уравнения равновесия:
Рис.17
Различные формы условий равновесия плоской системы сил:
1. Ранее приведенная система
2. Эквивалентная ей система уравнений равновесия для любых трех точек, не лежащих на одной прямой.
3. Также эквивалентная первой система
для любых точек А и В, если ось X не перпендикулярна отрезку АВ.
Для плоской системы параллельных сил имеем аналогичную систему уравнений равновесия для любых точек А и В.
Статически определимые и неопределимые системы
Для любой системы сил для разрешимости задач необходимо, чтобы число неизвестных сил не превышало максимального числа возможных уравнений равновесия.
2. КИНЕМАТИКА
2.1. Основные понятия
Кинематикой называется раздел механики, в которой изучаются геометрические свойства движения тел без учета их инертности (массы) и действующих на них сил.
Под движением мы понимаем в механике изменение с течением времени положения данного тела в пространстве по отношению к другим телам.
2.2. Кинематика точки. Скорость и ускорение точки
в декартовых координатах
Положение точки М0 определяем радиус-вектором (рис. 18). Если точка движется относительно системы отсчета Oxyz, то ее координаты будут функциями времени:
Рис. 18
Скорость и ускорение точки М в некоторый момент времени:
Обозначим через S длину дуги траектории, отсчитываемой с соответствующим знаком от первоначального положения точки на траектории:
Тогда, очевидно,
Годограф.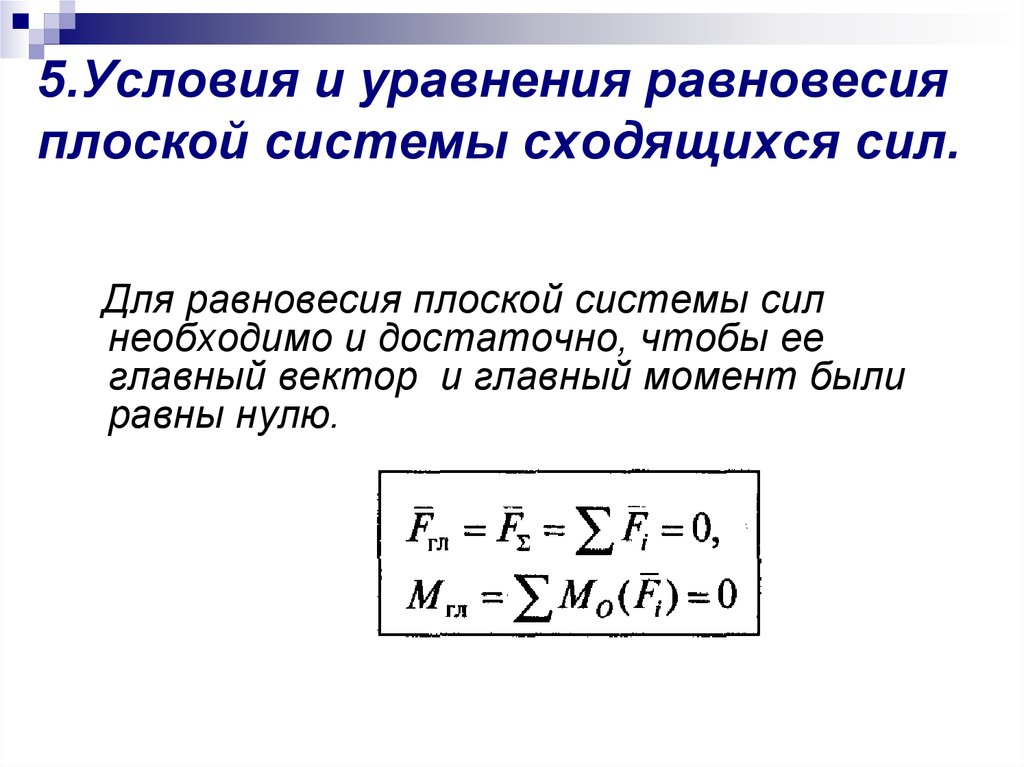 К началу неподвижной системы координат О приложим вектор ОР, равный по величине и направлению скорости движущейся точки. При движении точки М по ее траектории точка Р описывает некоторую кривую, называемую годографом скорости точки М. Очевидно, скорость точки годографа Р равна по определению ускорению точки М.
К началу неподвижной системы координат О приложим вектор ОР, равный по величине и направлению скорости движущейся точки. При движении точки М по ее траектории точка Р описывает некоторую кривую, называемую годографом скорости точки М. Очевидно, скорость точки годографа Р равна по определению ускорению точки М.
2.3. Скорость и ускорение точки
в естественной системе координат
Определим орт , он направлен по касательной к траектории. Вектор ортогонален к орту .
Составим отношение:
где k − кривизна траектории, R − радиус кривизны траектории.
Третий орт определим как
Определим скорость и ускорение точки в естественной системе координат:
; то есть
Таким образом, скорость точки всегда направлена по касательной к траектории.
то есть
Из последних соотношений получим формулу:
2.4. Скорость и ускорение точки в полярных координатах
Положение точки на плоскости известно, если заданы радиус-вектор и полярный угол φ как функции времени (рис. 19):
19):
Введем единичный вектор , направленный по радиус-вектору от полюса О к точке М. Тогда
Для скорости получаем :
Рис. 19
Для производной по времени от единичного вектора имеем:
После этого для скорости точки в полярных координатах получаем:
Таким образом, радиальная и трансверсальная составляющие вектора скорости имеют вид:
Для ускорения легко получить:
2.5. Скорость и ускорение точек в цилиндрических
координатах
Положение точки М в пространстве определяют заданием трех ее цилиндрических координат как функций времени (рис. 20):
Условия равновесия произвольной системы сил. Частные случаи.
Условия равновесия произвольной системы сил. Частные случаи.41) Условия равновесия произвольной системы сил. Частные случаи.
Произвольная система сил, приложенных к твердому телу, эквивалентна силе, равной главному вектору R, и паре сил с моментом, равным главному моменту L0 относительно какого-либо центра О. Чтобы такая система находилась в равновесии, необходимо и достаточно равенство нулю и главного вектора R, и главного момента L0. Поэтому условия равновесия пространственной системы сил могут быть представлены в векторной форме
Чтобы такая система находилась в равновесии, необходимо и достаточно равенство нулю и главного вектора R, и главного момента L0. Поэтому условия равновесия пространственной системы сил могут быть представлены в векторной форме
Условия равновесия можно сформулировать так: для равновесия произвольной системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы проекций всех сил на оси декартовой системы координат равнялись нулю и суммы моментов всех сил относительно этих осей также равнялись нулю.
Частные случаи.
Условия равновесия пространственной системы параллельных сил.
Если силы, действующие на твердое тело, параллельны между собой, то можно выбрать такую систему координат, когда одна из ее осей, например Oz, параллельна направлению действия сил (рис.). Тогда из шести аналитических условий равновесия три выполняются тождественно, и система параллельных сил будет иметь только три условия равновесия:
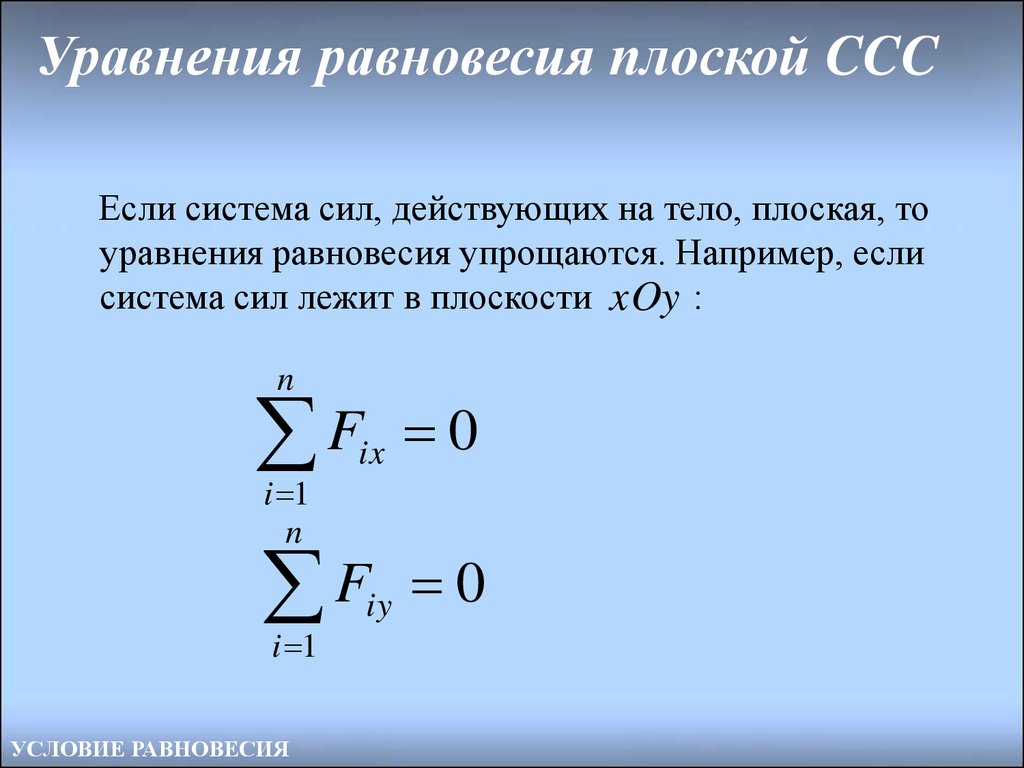
Условия равновесия плоской системы сил.
Для плоской системы сил условия равновесия будут частным
случаем уравнений , определяющих условия равновесия пространственной системы сил. Например, если силы расположены в плоскости Оху, то аналитические условия равновесия можно записать в виде:
Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из двух координатных осей и сумма алгебраических моментов этих сил относительно любого центра О были равны нулю. Алгебраическим моментом силы относительно точки называют момент силы относительно оси, проходящей через данную точку перпендикулярно плоскости, в которой расположена сила и
точка.
Вместо иногда удобно применить условия равновесия в виде уравнений трех моментов: для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы алгебраических моментов всех этих сил относительно любых трех центров А, В, С, не лежащих на одной прямой, были равны нулю: .
Необходимость утверждения следует из того, что третье условие справедливо для любой точки. Достаточность докажем методом от противного, используя теорему о приведении произвольной системы сил к центру. Допустим, что плоская система сил не находится в равновесии. Тогда, приводя ее поочередно к точкам А, В, С, будем иметь в этих точках равнодействующую R . Для выполнения равенств равнодействующая должна пройти одновременно через все три точки, а это невозможно, так как точки не лежат на одной прямой. Следовательно, равнодействующая равна нулю и система сил, удовлетворяющая
Используются технологии uCoz
[Решено] В случае параллельных и копланарных сил условие
Этот вопрос ранее задавался в
UKPSC JE Mechanical 2013 Official Paper I
Посмотреть все UKPSC JE Papers >
- ∑H = 0; ∑В = 0; ∑М = 0
- ∑Н = 0; ∑V = 0
- ∑H = 0; ∑V ≠ 0
- ∑H = 0; ∑M = 0
Вариант 2: ∑H = 0; ∑V = 0
Бесплатно
CT 1: शब्द रचना (उपसर्ग और प्रत्यय)
4,5 тыс. пользователей
пользователей
10 вопросов
10 баллов
10 минут
Объяснение :
Уравнения равновесия
Уравнения равновесия, используемые при анализе задач статики, и неизвестные компоненты реакции (или реактивные силы) в задаче вполне взаимосвязаны.
Следующее обсуждение будет полезно читателю.
Система параллельных сил
- Следующие уравнения движения, которые основаны на обсуждении чертежей диаграмм свободного тела, могут быть легко написаны:
- ∑F = 0 или F = ∑Fx + ∑Fy = 0
- или ∑Fx = 0
- и ∑Fy = 0
- Уравнения показывают, что в случае параллельной копланарной системы сил мы можем найти величины двух неизвестных реактивных сил.
Система параллельных пространственных (или некомпланарных) сил
- Для условия равновесия этой системы сил существенным условием снова является:
- ∑ F̅ = 0 или F̅ = ∑Fx + ∑Fy + ∑Fz = 0
- Сбор членов в направлениях x, y и z аналитических уравнений следующим образом:
- ∑Fx = 0
- ∑Fy = 0
- ∑Fz = 0
Система неконкурентных копланарных сил
- Чтобы данное тело находилось в равновесии, должны выполняться следующие уравнения (которые будут обсуждаться в последующих разделах):
- ∑ F̅ = 0 или F̅ = ∑Fx + ∑Fy = 0
- и ∑Mz = 0
- или ∑Fx = 0
- ∑Fz = 0
- и ∑Mz = 0
- В этом случае силы копланарны и сосредоточены в плоскости x-y.
 уравнение ∑Mz = 0 указывает на то, что сумма моментов относительно любой точки x-y или относительно любой точки плоскости сил должна быть равна нулю.
уравнение ∑Mz = 0 указывает на то, что сумма моментов относительно любой точки x-y или относительно любой точки плоскости сил должна быть равна нулю.
Неконкурентная пространственная система сил
- Для равновесия неконкурентной пространственной системы сил должны быть следующие уравнения равновесия:
- ∑ F̅ = 0 или F̅ = ∑Fx + ∑Fy + ∑Fz = 0
- и
- или аналитические уравнения равновесия:
- ∑Fx = 0
- ∑Fy = 0
- ∑Fz = 0
- А также
- ∑Mx = 0
- ∑Мой = 0
- ∑Mz = 0
Поделиться в WhatsApp
Последние обновления UKPSC JE
Последнее обновление: 10 апреля 2023 г.
UKPSC (Комиссия по государственной службе штата Уттаракханд) отменила UKPSC JE на цикл 2021 года. Новое уведомление будет выпущено во 2-ю неделю апреля 2023 года.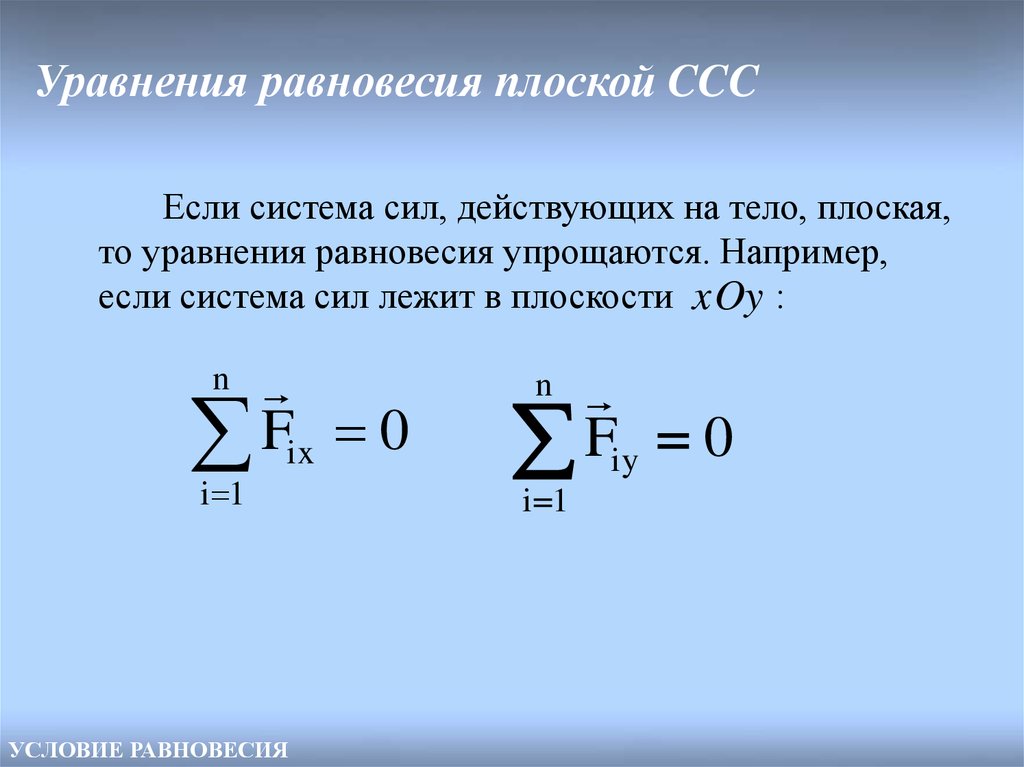 Онлайн-экзамен UKPSC JE будет проведен в августе 2023 года. Кандидаты, прошедшие онлайн-экзамен, получат право пройти в следующий тур отбора. процесс, который является раундом интервью. Кандидаты, которые будут окончательно отобраны, получат достойную шкалу заработной платы в диапазоне от рупий до рупий. 44900 до рупий. 142400. Кандидаты могут проверить документы UKPSC JE предыдущего года, которые помогают понять уровень сложности экзамена.
Онлайн-экзамен UKPSC JE будет проведен в августе 2023 года. Кандидаты, прошедшие онлайн-экзамен, получат право пройти в следующий тур отбора. процесс, который является раундом интервью. Кандидаты, которые будут окончательно отобраны, получат достойную шкалу заработной платы в диапазоне от рупий до рупий. 44900 до рупий. 142400. Кандидаты могут проверить документы UKPSC JE предыдущего года, которые помогают понять уровень сложности экзамена.
Равновесие параллельных сил — типы, условия, примеры Силы. Сила имеет величину и направление, потому что это векторная величина. Если величина и направление сил, действующих на объект, точно уравновешены, результирующая сила не прилагается, и он считается находящимся в равновесии.
Эрве Ланжевен создал термин Равновесие параллельных сил (ECF). Впервые оно встречается в статье Ланжевена 1911 года «Приложения статистических уравнений динамики», где оно описывается как понятие, обобщающее понятие силы. Согласно этой теории, силы — это тенденция системы изменять свой маршрут с наименьшими усилиями, чтобы ее движение было непрерывным, а не серией скачков. Давайте углубимся в концепции равновесия действующих сил.
Давайте углубимся в концепции равновесия действующих сил.
Загрузить полный SOM/Engg. Формулы механики для GATE и ESE
Содержание
- 1. Что такое равновесие действующих сил?
- 2. Типы равновесия совпадающих сил
- 3. Компланарные силы
- 4. Условия статического равновесия совпадающих сил
- 5. Важные моменты о равновесии совпадающих сил
- Чтобы силы считались компланарными, сумма всех сил должна быть равна нулю.

- Общая сумма моментов сил в конкретном случае на маршруте по часовой стрелке равна сумме моментов сил в том же месте на маршруте против часовой стрелки.
- Сумма всех сил в направлении Y или по вертикали равна нулю. ΣF y =0 или ΣF В =0
- Сумма всех сил равна нулю в горизонтальном направлении или направлении x. ΣF x =0 или ΣF H =0
- Равновесие – это состояние двух равных сил, действующих в противоположных направлениях.
- Векторы не пересекаются в точке, где могут действовать неконкурентные копланарные силы, поскольку они не параллельны друг другу.
- три параллельные силы одинаковой величины находятся в равновесии.
- Когда на тело действует одна сила, равновесие не может быть достигнуто.
- Замкнутый многоугольник возникает в результате прямого взаимодействия трех или более равновесных сил.

Что такое уравнение равновесия для системы действующих сил?
Для параллельных сил тело является точкой. Таким образом, их сумма должна быть равна нулю, чтобы противодействующие силы находились в равновесии. Когда тело находится в равновесии и не ускоряется, сумма всех сил = 0,
Что такое действующие силы?
Совпадающие силы приложены к телу таким образом, что его линии действия пересекаются в одном месте. Используя законы треугольника и параллелограмма сложения векторов, можно определить результирующую силу, действующую на частицу из-за многих сил, действующих на тело.
Каковы различные условия равновесия для системы параллельных сил?
обстоятельства статического равновесия действующих сил следующие. Все силы, действующие горизонтально или в направлении х, в сумме равны нулю. Суммарная сила, действующая в вертикальном направлении или в направлении Y, равна нулю.
 Если две силы равны и действуют в противоположных направлениях, то они находятся в равновесии.
Если две силы равны и действуют в противоположных направлениях, то они находятся в равновесии.Что такое статическое равновесие?
Этот тип равновесия возникает, когда сумма всех сил, действующих на тело, равна нулю, а это означает, что и скорость тела, и результирующее ускорение равны нулю. Он обозначает состояние покоя тела. Другими словами, если тело покоится и его результирующее ускорение равно нулю, оно находится в статическом равновесии.
Что такое динамическое равновесие?
В этой форме равновесия сумма всех сил, действующих на тело, равна нулю, т. е. чистое ускорение тела равно нулю, но скорость тела не равна нулю. Это указывает на постоянную скорость движения тела. Говорят, что тело находится в динамическом равновесии, если на него не действует результирующая сила и оно продолжает двигаться с постоянной скоростью.
- Что такое равновесие
0 Совпадающие силы?
Говорят, что тело находится в равновесии, когда все его силы уравновешены (уравновешены) и на него не действует результирующая сила. Понятие равновесия необходимо для понимания. Когда на тело действует нулевая результирующая сила, оно также испытывает нулевое чистое ускорение (согласно второму закону движения).
Совпадающие силы — это те, которые пересекаются в одной точке. Имея дело с параллельными силами, мы можем добавить их как векторы, чтобы получить результирующую. Важно помнить, что ускорение равно нулю, когда тело находится в равновесии.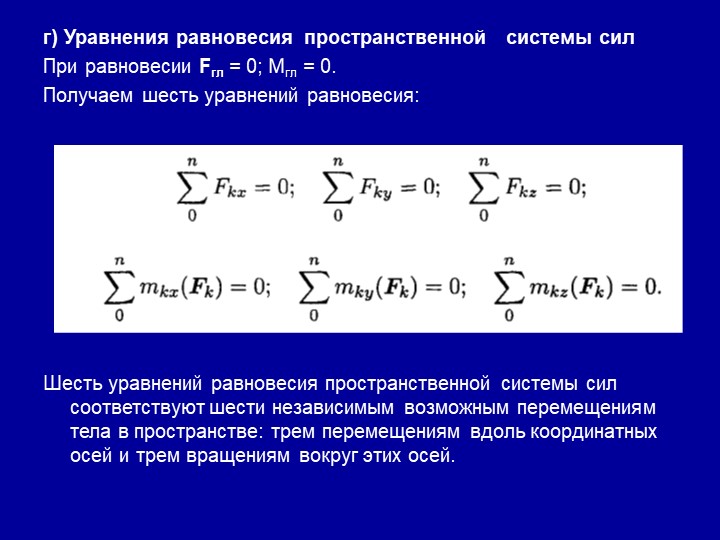 Это один из критериев равновесия действующих сил.
Это один из критериев равновесия действующих сил.
Типы равновесия совпадающих сил
Существуют две основные категории равновесия совпадающих сил. К ним относятся динамическое равновесие и статическое равновесие. Состояние тела таково, что все результирующие силы равны нулю, когда оно находится в статическом равновесии. Ускорения и скорости нет. Суммарная сила в динамическом равновесии равна нулю, хотя скорость — нет.
Статическое равновесие
Этот тип равновесия возникает, когда сумма всех сил, действующих на тело, равна нулю, что означает, что скорость тела и результирующее ускорение равны нулю. Он обозначает состояние покоя тела. Другими словами, если тело покоится и его результирующее ускорение равно нулю, оно находится в статическом равновесии.
Например, допустим, на полу лежит блок, на который действуют две силы, каждая из которых имеет величину 5 Н. Силы будут уравновешивать друг друга, оставляя блок без чистой силы. Он будет находиться в статическом равновесии, потому что блок покоится.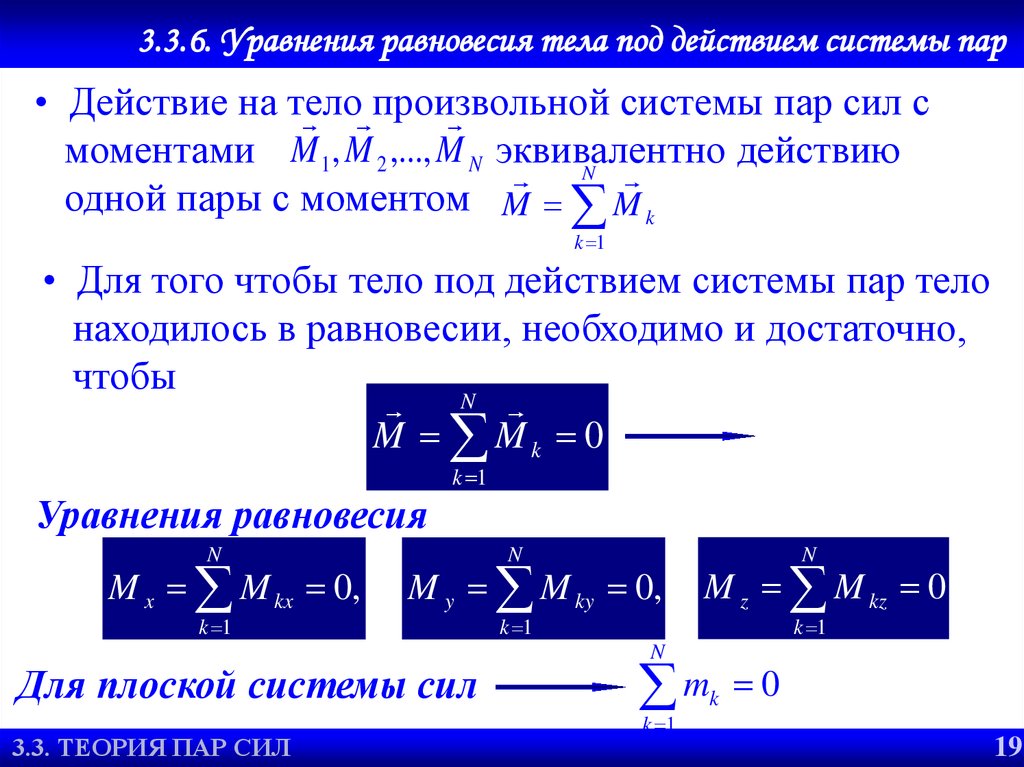
Динамическое равновесие
Этот тип равновесия возникает, когда сумма всех сил, действующих на тело, равна нулю, а это означает, что суммарное ускорение тела равно нулю, а его скорость — нет. Это указывает на то, что тело движется непрерывно. Тело считается находящимся в динамическом равновесии, если результирующая сила, действующая на него, равна нулю и оно продолжает двигаться с постоянной скоростью.
Например, динамическое равновесие иногда демонстрируется блоком, связанным с пружиной и движущимся под действием простого гармонического движения (S.H.M.). Блок находится в динамическом равновесии в среднем положении, поскольку на него не действует результирующая сила, но скорость блока максимальна.
Загрузить полные заметки о формулах по механике жидкости в формате PDF
Копланарные силы
Силы, действующие в одной плоскости, называются копланарными силами. Копланарные силы также могут быть в равновесии при определенных обстоятельствах.
Важно отметить, что существует множество различных копланарных сил. Силы в одной плоскости должны пересекаться в одном месте, чтобы существовали параллельные копланарные силы равновесия. Для его расчета могут использоваться как алгебраические, так и графические методы. Две другие разновидности компланарной силы параллельны и неконкурентны. Неконкурентные векторы силы компланарной системы не обязательно должны быть параллельны или даже пересекаться в какой-либо точке. Силы, которые действуют параллельно на объект, известны как параллельные копланарные силы.
Объект считается находящимся в состоянии равновесия, когда все силы, действующие на него, уравновешены. Если силы, направленные вверх, равны силам, направленным вниз, а силы, направленные вправо, равны силам, направленным влево, то говорят, что силы уравновешены.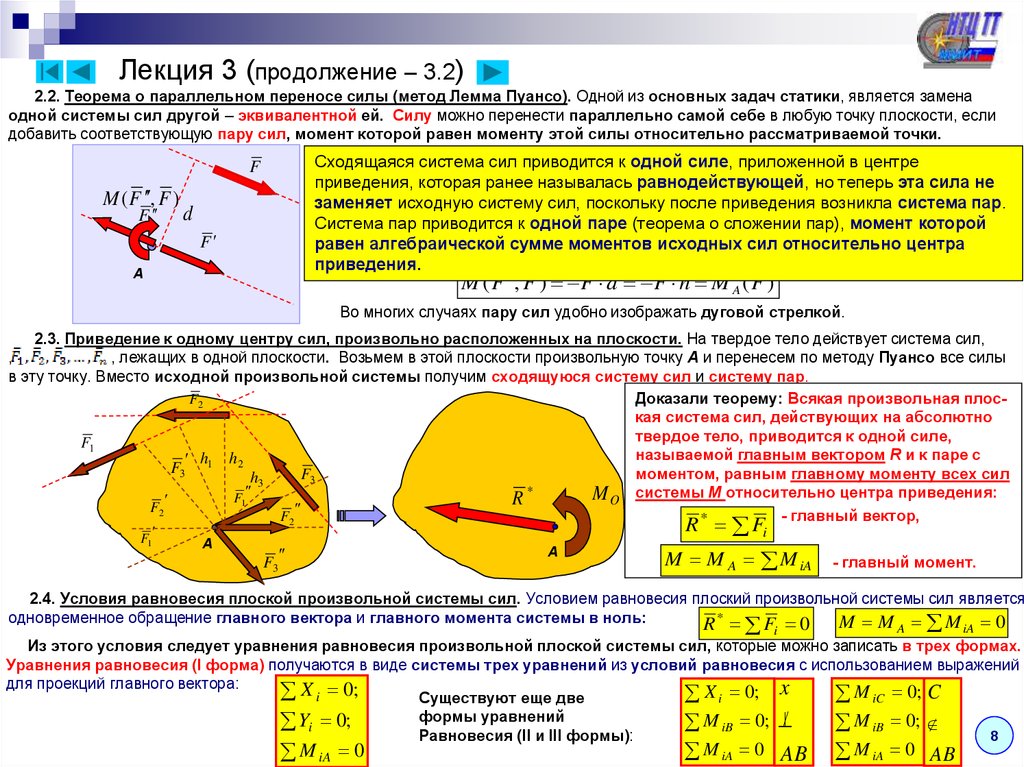 Однако это не означает, что все силы равны. Условия статического равновесия параллельных сил следующие:
Однако это не означает, что все силы равны. Условия статического равновесия параллельных сил следующие:
Формулы для машиностроения GATE – Сопротивление материалов
Важные моменты о равновесии совпадающих сил
Часто задаваемые вопросы о равновесии действующих сил
ESE & GATE ME
Mechanical Engg.gategate Mehpclbarc Soeseies Mebarc Exame Exmement Emembeter
Имея статьи
