Решебник Яблонский 1985 года — Задание С4_Тема: Определение реакций опор составной конструкции (система трех тел)
|
Физика Волькенштейн Практический курс физики Малекулярная и термодинамика Теоретическая механика Мещерский Математика Филиппов |
| Наши группы: |
|
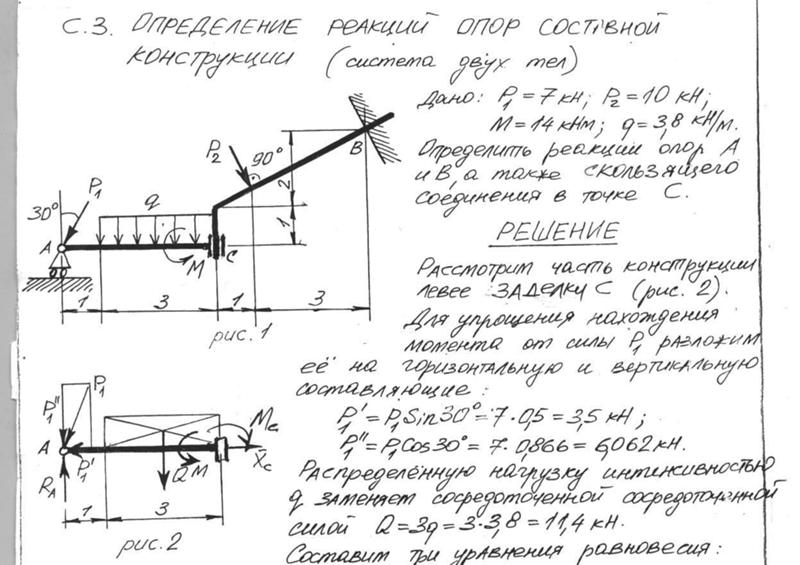
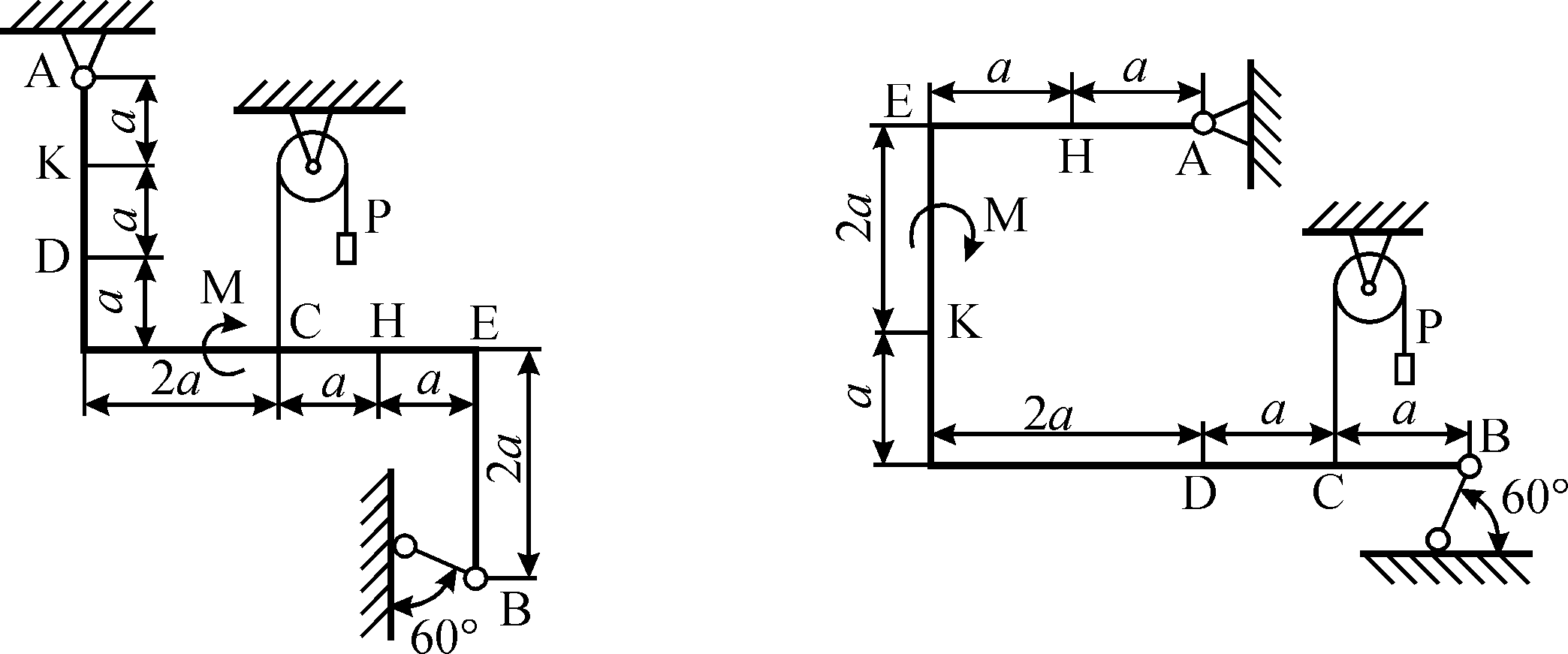
Найти реакции опор составной конструкции, состоящей из трех тел, соединенных в точке D.
|
|||||||||||||||||||||||||||||||||
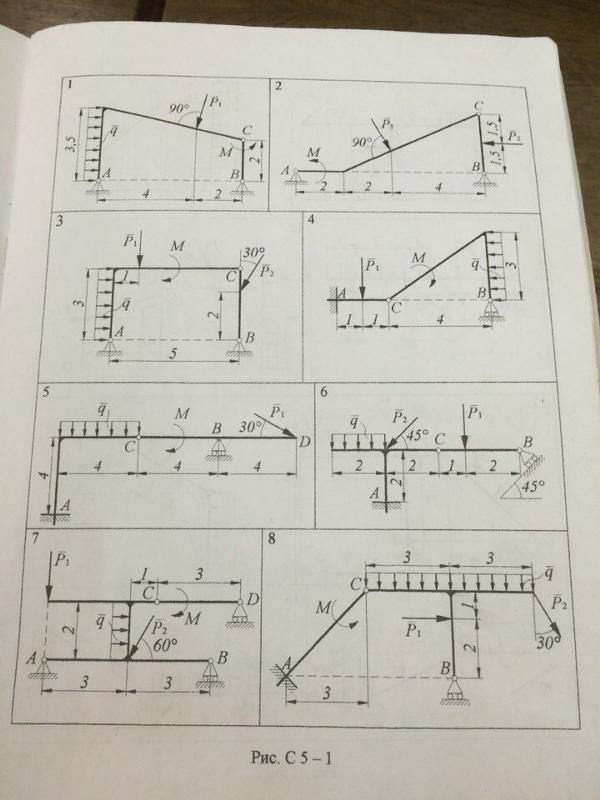
 Схемы конструкций представлены на рис. 25 — 27 (размеры — в м), нагрузка указана в табл. 8. В вариантах 1 — 15, 21 — 30 составные части соединены с помощью шарниров, а в вариантах 16 — 20 — с помощью гладкой втулки малой длины.
Схемы конструкций представлены на рис. 25 — 27 (размеры — в м), нагрузка указана в табл. 8. В вариантах 1 — 15, 21 — 30 составные части соединены с помощью шарниров, а в вариантах 16 — 20 — с помощью гладкой втулки малой длины.Теоретическая механика
Лекция (1-5).
 Введение. Момент силы.
Введение. Момент силы.Лекция (6-10). Аксиомы
-
Лекция (11). Аксиома отвердевания
Лекция (12). Системы сил
Лекция (13). Сила — скользящий вектор
Лекция (14-15). Элементарные операции
Лекция (16). Приведение к 2-м силам
Лекция (17). Пара сил
Лекция (20). Теорема Пуансо
Лекция (21). Условие равновесия
Лекция (22). Варианты систем уравнений равновесия плоской системы
Лекция (23). Условие равновесия плоской системы
Лекция (24). Формула Пуансо
Лекция (25-26). Динама
Лекция (27). Случаи приведения
Лекция (28). Трение скольжения
Лекция (29). Трение качения
Лекция (30). Ферма
Лекция (30) eng. Truss
Лекция eng.

Задача. Фигура из стержней
Задача. Самолет
Задача. Плоская фигура. Способ 1 (разбиение)
Задача. Плоская фигура. Способ 2 (метод отрицательных площадей)
Задача. Плоская фигура. Способ 4 (формула Грина)
Задача. Плоская фигура. Способ 5 (эксперимент)
Лекция. Сложение параллельных сил. Свойство пары.Лекция в Н202. 9.2.2016
Лекция. Часть 1. Приведение системы сил к центру. Изменение центра приведения.
Лекция. Часть 2. Скалярный инвариант.
Лекция. Часть 3. Уравнение центральной винтовой оси. Динама.
Лекция. Часть 4. Минимальный момент приведения.
Лекция. Часть 5. Уравнение центральной винтовой оси. Пример.
Решение задачи на равновесие одного тела (2015)
Решение задачи на равновесии рамы (2016).
 Три реакции. ТФ-04-15
Три реакции. ТФ-04-15Рама. Одно тело, скользящая заделка, подвижная опора (1A)
Рама. Одно тело, скользящая заделка, подвижная опора (1B)
Рама. Одно тело, скользящая заделка, подвижная опора (1С)
Рама. Составная конструкция (2)
Рама. Составная конструкция (2a). Заделка-шарнир-подвижный шарнир. Анимация и графика П.Горшкова.
Составная трехшарнирная конструкция.
Рама. Составная конструкция (2b). Два шарнира и скользящая заделка. Анимация и графика П.Горшкова.
Цепь . Определяем положение равновесия. Анимация и графика П.Горшкова.
Задача на теорему о трех силах. . Определяем реакции опор. Анимация и графика П.Горшкова.
Составная конструкция (3 тела, шарнир) . Определяем реакции опор. Анимация и графика П.Горшкова.
Составная конструкция (3 тела, шарнир, стержень) .
 Определяем реакции опор. Анимация и графика П.Горшкова.
Определяем реакции опор. Анимация и графика П.Горшкова.Рама. Составная конструкция (3)
Рама. Составная конструкция. (4)
Рама. Составная конструкция. Три тела (5)
Рама. Составная конструкция. Три тела (6)
Плоская стержневая система (6 стержней). Вырезание узлов. Анимация Петра Горшкова. Задача из Решебника (с.15)
Составная конструкция. Решение задачи в системе Maple.
Составная конструкция. Линейно распределенная нагрузка. (1-я часть)
Составная конструкция. Линейно распределенная нагрузка. Maple (2-я часть)
Составная конструкция. Распределенная нагрузка.
Составная конструкция. Линейно распределенная нагрузка. Съемка на практических занятиях в гр. ТФ-06-13
Составная конструкция. Нагрузка, распределенная по дуге. + решение в Maple
Составная конструкция.
 Нагрузка, распределенная по дуге. ТФ-05-13, 21.2.2014.
Нагрузка, распределенная по дуге. ТФ-05-13, 21.2.2014.Составная конструкция с цилиндром и нитями. + решение в Maple
Составная конструкция. Две пластины. + решение в Maxima
Две пластины.
Составная конструкция.Пластина и уголок
Ферма. Программа
Диаграмма Максвелла-Кремоны
Ферма/Диаграмма-Максвелла-Кремоны
Ферма (8)
Трение качения (7)
Трение качения. Механизм
Задача на трение качения (3 тела) . Определяем условие равновесия системы. Анимация и графика П.Горшкова.
Задача на трение скольжения. Определяем условие равновесия рамы. Анимация и графика П.Горшкова.
Задача на трение скольжения . Определяем условие равновесия рамы + некоторые рассуждения на общие темы…
Пространственная стержневая система (6 стержней). Вырезание узлов. Анимация Петра Горшкова. Задача из Решебника (с.86)
Полка (9)
Инварианты (10)
Плита на 6 стержнях
Текст программы для MaximaОдносторонняя связь в раме
Центр тяжести
СТАТИКА
Плоская система сил. Задачи
Ферма
Трение
Пространственная система сил.
 Задачи
Задачи
Полярные координаты. Лекция.
Радиус кривизны. ТФ-05-13.
Многозвенный механизм. Метод кинематических графов. МЦС. Все в общем виде.
Многозвенный механизм. Скорости и ускорения. МЦС. МЦУ.
Пятизвенник. Уравнение трех угловых скоростей и ускорений
Метод кинематических графов. Многозвенный механизм. Угловые скорости. Решение в Maple
Многозвенный механизм. МЦС
Четырехзвенник. Уравнение трех угловых скоростей (1)
Четырехзвенник.
 Уравнение трех угловых скоростей (2)
Уравнение трех угловых скоростей (2)Четырехзвенник. Теорема трапеции
План скоростей.
Ускорение точки тела при плоском движении.
Ускорения. Механизм
Планетарный механизм. Метод графов и метод МЦС
Планетарный механизм (1). Метод Виллиса и метод МЦС
Планетарный механизм (2). Метод Виллиса и метод МЦС
Угловые скорости многозвенного механизма. Эффективное решение с помощью уравнения трех угловых скоростей
Сложное движениеСложное движение точки. Ускорение Кориолиса. Вывод формулы
Сложное движение точки. Ускорение Кориолиса. Правило Жуковского
Сложное движение точки. Ускорение Кориолиса. Пример
Сложное движение точки. Абсолютное ускорение. Задача
Сложное движение точки. Задача о муфте (К13,1)
Сложное движение точки.
 Задача о муфте/Ускорение (ТФ-05-13)
Задача о муфте/Ускорение (ТФ-05-13)Сложное движение точки. Задача о муфте (К13,2)
Сложное движение точки. Задача о качающейся муфте (К13,3). Программа для Maple
Сферическое движение. Кинематические уравнения Эйлера в проекции на подвижные оси
3D кинематика. Решение задачи о треугольнике
3D кинематика. Параллелепипед с шарнирной крышкой
3D кинематика. Передача вращений
Редуктор (на занятиях ЭР-16-11)
Формула поворота Родрига (на лекции)
КИНЕМАТИКА
ТочкаПлоское движение
-
ДИНАМИКА
Кинетическая энергия. Решение задачи Д2 (приведенные массы)
Решение задачи на теорему об изменении кинетической энергии. Maple
Решение задачи на теорему о движении центра масс. Maple
Решение задачи на теорему о движении центра масс. ТФ-05-13, практические занятия в МЭИ
Теорема Эйлера о движении жидкости .
 Лекция 1.4.2014
Лекция 1.4.2014Решение задачи динамики для механизма с двумя степенями свободы (D11) (Уравнение Лагранжа 2-го рода)
Задача о механизме с двумя степенями свободы. Уравнение Лагранжа. Лекция 22.4.2014
Динамика кулисы. Лекция 15.12.2014
Maple-программа к лекции, Текст задачи из лекции.Потенциальное силовое поле (Лекция в МЭИ, 22.4.2014)
Решение задачи с помощью принципа возможных перемещений(Определение реакций опор)
Решение задачи с помощью принципа возможных перемещений(Определение условия равновесия механизма, Р-16-11, 24 марта)
Три способа решения простой задачи динамики (Катушка на нити, определяем ускорение)
Динамика механизма с неизвестным параметром (Д7)
Вывод уравнения Лагранжа 2-го рода
Кинетическая энергия тела в пространстве
Кинетическая энергия тела в простейших случаях движения
Кинетическая энергия системы (стержни, блок).
 Приведенная масса
Приведенная массаЗадачи на принцип возможных перемещений
Регулярная прецессия гироскопа.
Задачи о гироскопе. Гироскопический момент
Динамические уравнения Эйлера.
Теорема Карно
Прямой удар. Точка. Коэффициент восстановления
Косой удар.
Центр удара.
Удар по пластине
Удар в зубчатой передаче. (Лекция 15 мая 2015 г. ИТАЭ, МЭИ)
Два груза на балке Лекция 11.9.2015 в гр. С-12-11
Стабильность Лекция 5 мая 2015 в гр. ЭР-16-12
Момент инерции тела относительно произвольной оси.
Несвободное движение точки. Уравнение Лагранжа
Динамическая балансировка
Уравнение Лагранжа в форме Лагранжа
Устойчивость по Ляпунову
Уравнение Мещерского.
 Формула Циолковского
Формула ЦиолковскогоСиловое поле. Условие потенциальности
Колебания механической системы
Колебания системы с 2 степенями свободы. Задача 1.
Колебания системы с 2 степенями свободы. Задача 2.
Колебания узла фермы
Предельные частоты и предельные массы
Колебания точки
Задача о двойном маятнике (лекция 27 мая 2014, МЭИ)
Законы Кеплера
Теория удара
Колебания, устойчивость и др.
1. Два цилиндра, пластина, стержни.
2. Брусок, цилиндр сверху, шток и стержень. Простая задача.
3. Используем теорему о сложении скоростей.
4.
 Задача с муфтой. Используем метод прямого дифференцирования.
Задача с муфтой. Используем метод прямого дифференцирования.5. Задача с линейной обобщенной координатой. Цилиндр, клин и муфта.
6. Задача с параллелограммом.
7. Кривошип, два цилиндра, наклонный стержень, муфта
8. Цилиндр, закрепленный шарнирно на ободе, брусок и пластина между ними
9. Цилиндр, наклонная плоскость, пресс и пластина между ними. Линейная обобщенная координата
10. Невесомый прямоугольный уголок, скользящий по ребрам неподвижного бруска.
11. Блок из колес с неподвижной осью, груз на наклонной плоскости. Повернутые оси координат. Линейная обобщенная координата.
12. Блок из колес с неподвижной осью и цилиндр с подвижной осью.
 Линейная обобщенная координата.
Линейная обобщенная координата.13. Два цилиндра и груз. Один цилиндр катится по неподвижной поверхности, другой закреплен на ободе первого и катится по грузу.
14. Два цилиндра и соединяющий их стержень
15. Два цилиндра, сверху балка и вертикальный шток
Экзаменационная задача в МЭИ. Решение задачи на составление уравнения Лагранжа 2-го рода
|
19.09.2017 18:55
Взаимосвязь теоретической механики, механики материалов и строительной механики
Теоретическая механика, механика материалов и строительная механика в совокупности называются «инженерной механикой» и представляют собой три основные дисциплины, лежащие в основе механики машиностроения.
Содержание исследований теоретической механики включает статику, кинематику и динамику.
2500T Станок для тиснения стальных дверей …
Включите JavaScript
В физике есть много материалов, идентичных механической части, и, конечно же, есть и углубленные материалы.
В инженерных дисциплинах, особенно при проектировании архитектурных сооружений, больше используется статическая часть.
На самом деле кинематика является очень важным компонентом машиностроения и аэрокосмической техники.
Если взять в качестве примера машиностроение, при проектировании механизма необходимо сначала проанализировать его состояние движения, рассчитать скорость и ускорение каждого компонента, а затем провести анализ сил с помощью динамических уравнений, конечно, знание статики необходимо.
То же самое верно и в гидромеханике.
На примере расчета коленчатого анкерного блока напорного трубопровода при анализе его напряженного состояния необходимо использовать уравнение импульса в динамике для расчета силы удара воды.
Таким образом, в конструкции здания относительно больше применяется его статическая часть.
Квазистатический метод в динамическом расчете (такой как метод, основанный на теории спектра отклика в сейсмическом расчете) фактически получен из принципа Даламбера в теоретической механике (также называемый динамическим статическим методом, который заключается в преобразовании динамической задачи в статическую задачу для ее решения).
Можно сказать, что теоретическая механика является основой группы дисциплин механики.
В механике материалов, строительной механике и даже в механике упруго-пластических взаимодействий участвуют балансовые соотношения сил, что составляет содержание исследований в области статики.
Механика материалов изучает напряжение и деформацию стержней.
Основная деформация включает осевое растяжение и сжатие, сдвиг, кручение и изгиб.
Более сложная деформация есть не что иное, как комбинация этих основных деформаций (например, устойчивость стержня на сжатие есть комбинация изгиба и осевого сжатия).
Соответствующие внутренние силы включают осевую силу, сдвиг, крутящий момент и изгибающий момент.
С микроскопической точки зрения основную деформацию можно отнести к нормальной деформации и деформации сдвига, основную внутреннюю силу можно отнести к нормальному напряжению и напряжению сдвига, а связующим звеном между напряжением и деформацией является закон Гука.
С макро точки зрения метод исследования механики материалов состоит в том, чтобы взять изолятор и затем изучить соотношение сил баланса.
Используются три основных уравнения: уравнение статического баланса, геометрическое уравнение и физическое уравнение.
Уравнение статического равновесия составляет содержание статики в теоретической механике;
Геометрическое уравнение является мерой пространственного соотношения между основными размерами деформированного стержня;
Физическое уравнение, также известное как определяющее уравнение, описывает связь между напряжением и деформацией, то есть закон Гука (при рассмотрении сложных напряженных состояний это также обобщенный закон Гука).
Конечно, в описанном выше процессе исследования требуется несколько основных допущений: линейная упругость, непрерывная однородность, изотропность и малая деформация.
При превышении определенного предела возникает большая ошибка. В настоящее время для исследований следует использовать упругопластическую механику и механику разрушения.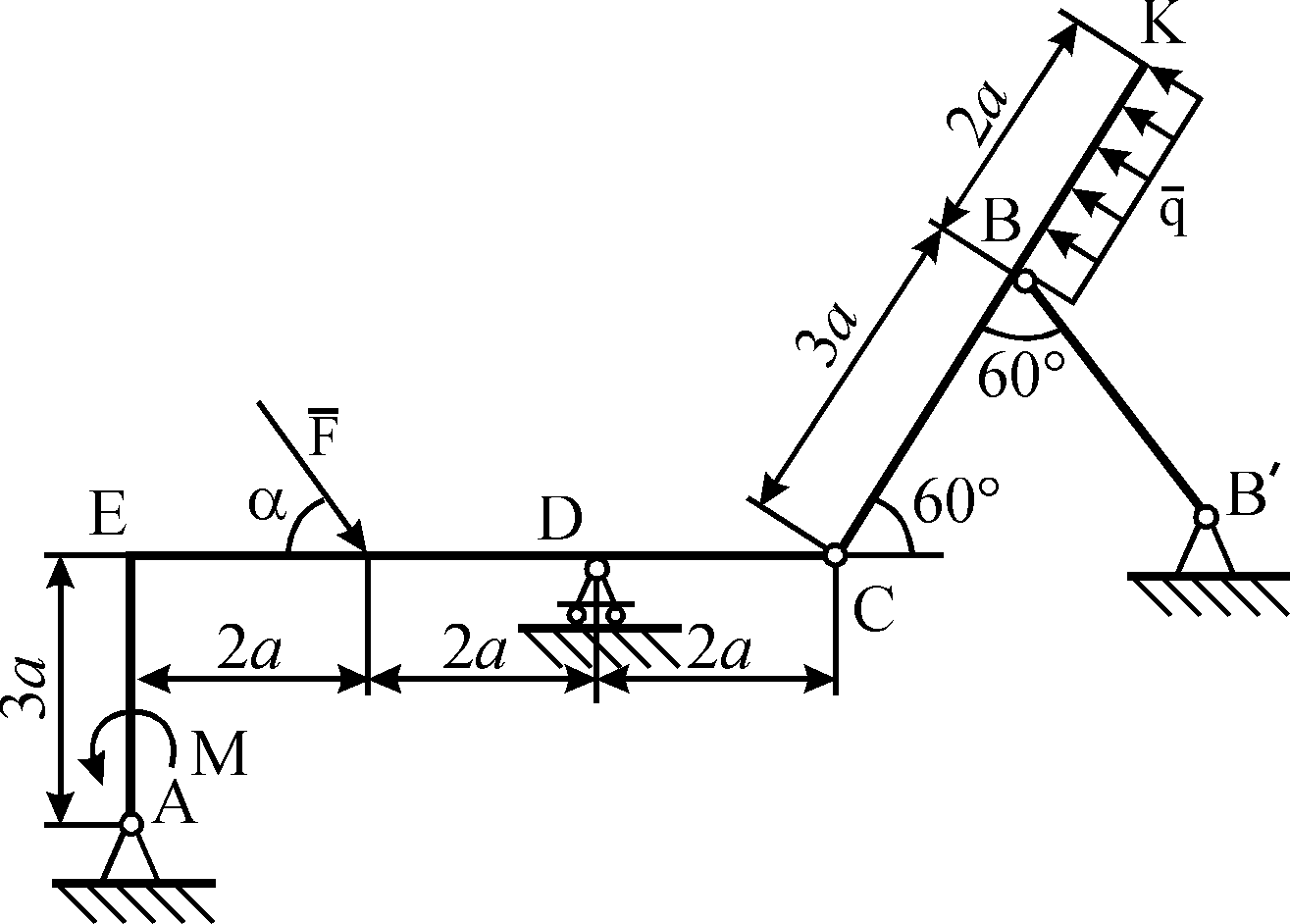
В механике материалов мы также будем изучать некоторые геометрические свойства поперечных сечений: площадь, статический момент, момент инерции, произведение инерции, полярный момент инерции, радиус инерции и т. д.
Поскольку это геометрическое свойство, это чисто математическая задача.
На самом деле он в основном рассчитывается интегральным методом.
Здесь нет большой сложности, но расчет составных сечений немного громоздок.
Строительная механика изучает силу и деформацию стержневых конструкций, а также изучает бетонные и практические конструкции, такие как рамы, гнутые рамы, арки, фермы и т. д.
Рычажная конструкция состоит из элементов, которые можно разобрать на элементы.
Следовательно, в основе строительной механики лежит механика материалов, ибо в конечном счете ее основная деформация и внутренняя сила совершенно такие же, как изучаемые в механике материалов.
Из-за членской системы существуют различные методы исследования.
Основными методами являются метод силы и метод перемещения.
С точки зрения практичности получены некоторые итерационные методы, такие как метод распределения моментов, метод распределения поперечной силы, метод точки изгиба и метод D-величины в анализе рамной конструкции, метод упругого центра в анализе арочной конструкции и т. д.
После дальнейшей дискретизации это метод смещения матриц, который в дальнейшем расширяется и расширяется до широко используемого метода конечных элементов.
Только один из них применим только к конструкции элемента (также известный как «анализ конструкции элемента методом конечных элементов»), а другой больше применим к сплошным средам (включая твердые вещества и жидкости), поэтому его область применения шире.
Поэтому развитие механики идет от простого к глубокому, от легкого к сложному и от простого к сложному шаг за шагом.
Без теоретической механики в качестве основы невозможно проанализировать взаимосвязь механического баланса конструкции и рассчитать опорную реакцию и внутреннюю силу конструкции.
Без механики материалов в качестве основы невозможно проанализировать внутреннюю силу и деформацию конструкции.
Поэтому сложно сказать, что важнее, но постепенный процесс.
Изучение механики сравнимо с изучением математики.
Изучение элементарной математики нельзя игнорировать, потому что высшая математика имеет более широкий спектр применения, более глубокое решение задач, а иногда даже более лаконичное.
Потому что некоторые основные правила операций в математике (такие как закон сочетания, закон обмена, закон распределения и т. д.) вообще применимы к высшей и элементарной математике.
И он основан на сводке правил элементарной математики (конечно, в высшей математике тоже бывают случаи, например, неприменение закона обмена, что является большим отличием от элементарной математики).
Следовательно, наследование и расширение дисциплины является основным внутренним законом в развитии дисциплины, а также важным символом ее непрерывной зрелости и совершенства.
Теоретическая и прикладная механика | SpringerLink
Перейти к основному содержаниюСкачать книгу PDF
Скачать книгу в формате EPUB
Теоретическая и прикладная механика
Скачать книгу PDF
Скачать книгу в формате EPUB
Авторы:
- Валентин Молотников 0 ,
- Антонина Молотникова 1
- Валентин Молотников
Донской государственный технический университет, Ростов-на-Дону, Россия
Посмотреть публикации автора
Вы также можете искать этого автора в пабмед Google Scholar
- Антонина Молотникова
Ростовский институт защиты прав предпринимателей, Ростов-на-Дону, Россия
Посмотреть публикации автора
Вы также можете искать этого автора в пабмед Google Scholar
Представляет предмет с постепенно возрастающей сложностью
Подкрепляет ключевые понятия контрольными вопросами и тестовыми заданиями в конце каждой главы
Включает приложения из различных отраслей (машиностроение, строительство)
16 тыс.
 обращений
обращений1 Цитаты
Секции
- Содержание
- Об этой книге
- Ключевые слова
- Авторы и филиалы
- Об авторах
- Библиографическая информация
 appendChild (скрипт)
var buybox = document.querySelector(«[data-id=id_»+ метка времени +»]»).parentNode
var сейчас = новая дата().getTime()
вар начало = 1650956400000
вар конец = 1652338800000
var isMeasuringTime = сейчас > начать && сейчас -1
;[].slice.call(buybox.querySelectorAll(«.опция покупки»)).forEach(функция (опция, индекс) {
var toggle = option.querySelector(priceNS + «.buying-option-price»)
var form = option.querySelector(«.форма-варианта-покупки»)
var priceInfo = option.querySelector(priceNS + «.price-info»)
если (allOptionsInitiallyCollapsed || узкаяBuyboxArea && индекс > 0) {
toggle.setAttribute («ария-расширенная», «ложь»)
form.hidden = «скрытый»
priceInfo.
appendChild (скрипт)
var buybox = document.querySelector(«[data-id=id_»+ метка времени +»]»).parentNode
var сейчас = новая дата().getTime()
вар начало = 1650956400000
вар конец = 1652338800000
var isMeasuringTime = сейчас > начать && сейчас -1
;[].slice.call(buybox.querySelectorAll(«.опция покупки»)).forEach(функция (опция, индекс) {
var toggle = option.querySelector(priceNS + «.buying-option-price»)
var form = option.querySelector(«.форма-варианта-покупки»)
var priceInfo = option.querySelector(priceNS + «.price-info»)
если (allOptionsInitiallyCollapsed || узкаяBuyboxArea && индекс > 0) {
toggle.setAttribute («ария-расширенная», «ложь»)
form.hidden = «скрытый»
priceInfo. hidden = «скрытый»
} еще {
переключить.щелчок()
}
})
}
начальное состояниеОткрыть()
если (window.buyboxInitialized) вернуть
window.buyboxInitialized = истина
initKeyControls()
если (window.fetch && isMeasuringTime) {
var свернутый = buybox.querySelector(«.buying-option.expanded») === ноль
var metricsAppendix = «»
metricsAppendix += «&discount=» + (buybox.querySelector(«.Цена-кампания-покупки-варианта»).className.indexOf(«со скидкой») !== -1).toString()
metricsAppendix += «&metricsGroup=» + кампанияPricesMetricsGroup
metricsAppendix += «&collapsed=» +collapsed.toString()
window.fetch(«https://test-buckets.
hidden = «скрытый»
} еще {
переключить.щелчок()
}
})
}
начальное состояниеОткрыть()
если (window.buyboxInitialized) вернуть
window.buyboxInitialized = истина
initKeyControls()
если (window.fetch && isMeasuringTime) {
var свернутый = buybox.querySelector(«.buying-option.expanded») === ноль
var metricsAppendix = «»
metricsAppendix += «&discount=» + (buybox.querySelector(«.Цена-кампания-покупки-варианта»).className.indexOf(«со скидкой») !== -1).toString()
metricsAppendix += «&metricsGroup=» + кампанияPricesMetricsGroup
metricsAppendix += «&collapsed=» +collapsed.toString()
window.fetch(«https://test-buckets. springer.com/log?v3&time=» + сейчас + приложение metrics)
.затем (функция (разрешение) {
вернуть рез.текст()
})
.поймать (функция () {
})
}
})()
springer.com/log?v3&time=» + сейчас + приложение metrics)
.затем (функция (разрешение) {
вернуть рез.текст()
})
.поймать (функция () {
})
}
})()Содержание (32 главы)
Искать в книгеFront Matter
Страницы i-xxviii
PDF
Теоретическая механика
Front Matter
Страницы 1-1
PDF
Статика
- Валентин Молотников, Антонина Молотникова
Страницы 3-52
PDF
Кинематика
- Валентин Молотников, Антонина Молотникова
Страницы 53-106
PDF
Динамика
- Валентин Молотников, Антонина Молотникова
Страницы 107-156
PDF
Теория удара
- Валентин Молотников, Антонина Молотникова
Страницы 157-190
PDF
Элементы аналитической механики
- Валентин Молотников, Антонина Молотникова
Страницы 191-219
PDF
Динамика управляемых систем
- Валентин Молотников, Антонина Молотникова
Страницы 221-250
PDF
Стабильность механических систем
- Валентин Молотников, Антонина Молотникова
Страницы 251-281
PDF
Основы теории механизмов и машин
Передний материал
Страницы 283-283
PDF
Базовые концепты
- Валентин Молотников, Антонина Молотникова
Страницы 285-290
PDF
Структурный анализ механизмов
- Валентин Молотников, Антонина Молотникова
Страницы 291-297
PDF
Кинематический анализ механизмов
- Валентин Молотников, Антонина Молотникова
Страницы 299-310
PDF
Динамический анализ механизмов
- Валентин Молотников, Антонина Молотникова
Страницы 311-319
PDF
Сопротивление материалов
Front Matter
Страницы 321-321
PDF
Исходные понятия и определения
- Валентин Молотников, Антонина Молотникова
Страницы 323-333
PDF
Расчет деталей на растяжение-сжатие
- Валентин Молотников, Антонина Молотникова
Страницы 335-347
PDF
Напряженное состояние: теории силы
- Валентин Молотников, Антонина Молотникова
Страницы 349-359
PDF
Сдвиг и кручение
- Валентин Молотников, Антонина Молотникова
Страницы 361-368
PDF
Изгиб
- Валентин Молотников, Антонина Молотникова
Страницы 369-389
PDF
Наверх
Об этой книге
В этом учебнике обобщается курс инженерной механики, рассчитанный на один или два семестра для студентов и выпускников различных академических специальностей. Книга охватывает все основные компоненты дисциплины, включая: теоретическую механику, теорию механизмов и машин, сопротивление материалов, детали машин и основы проектирования; взаимозаменяемость, стандартизация и технические измерения. Он также может быть использован студентами других технических направлений для достижения компетентности по каждой из перечисленных дисциплин. Краткая презентация позволяет сконцентрироваться на наиболее важных элементах представленных концепций, а также обрисовывает в общих чертах текущее состояние механики, демонстрирует инженерные приложения с использованием различных компьютерных пакетов (MathCad, CosmosWorks, Inkscape, AutoCad) и обновляет данные по инженерным материалам. В конце каждой главы приводятся примеры как простых, так и сложных инженерных расчетов вместе с вопросами для самооценки.
Книга охватывает все основные компоненты дисциплины, включая: теоретическую механику, теорию механизмов и машин, сопротивление материалов, детали машин и основы проектирования; взаимозаменяемость, стандартизация и технические измерения. Он также может быть использован студентами других технических направлений для достижения компетентности по каждой из перечисленных дисциплин. Краткая презентация позволяет сконцентрироваться на наиболее важных элементах представленных концепций, а также обрисовывает в общих чертах текущее состояние механики, демонстрирует инженерные приложения с использованием различных компьютерных пакетов (MathCad, CosmosWorks, Inkscape, AutoCad) и обновляет данные по инженерным материалам. В конце каждой главы приводятся примеры как простых, так и сложных инженерных расчетов вместе с вопросами для самооценки.Наверх
Ключевые слова
- Механика
- Статика
- Кинематика
- Динамика
- Аналитическая механика
- Управляемые системы
- Raus–H Критерий Урвица
- Закон Гука
- Машина
- Механизм
Наверх
Авторы и филиалы
Донской государственный технический университет, Ростов-на-Дону, Россия
Валентин Молотников
Ростовский институт защиты прав предпринимателей, Ростов-на-Дону, Россия
Антонина Молотникова
Наверх
Об авторах
Доктор Валентин Яковлевич Молотников — профессор Донского государственного технического университета Южного федерального округа, Ростовская область, Ростов-на-Дону, Россия. Д-р Антонина Александровна Молотникова — профессор Ростовского института защиты прав предпринимателей, Ростов-на-Дону, Россия.
Д-р Антонина Александровна Молотникова — профессор Ростовского института защиты прав предпринимателей, Ростов-на-Дону, Россия.
Наверх
Наверх
Скачать книгу PDF
Скачать книгу в формате EPUB
‘) var head = document.getElementsByTagName(«head»)[0] var script = document.createElement(«сценарий») script.type = «текст/javascript» script.src = «https://buy.springer.com/assets/js/buybox-bundle-a3cdb49e59.js» script.id = «ecommerce-scripts-» + метка времени head.appendChild (скрипт) var buybox = document.querySelector(«[data-id=id_»+ метка времени +»]»).parentNode var сейчас = новая дата().getTime() вар начало = 1650956400000 вар конец = 1652338800000 var isMeasuringTime = сейчас > начать && сейчас -1 ;[]. slice.call(buybox.querySelectorAll(«.опция покупки»)).forEach(функция (опция, индекс) {
var toggle = option.querySelector(priceNS + «.buying-option-price»)
var form = option.querySelector(«.форма-варианта-покупки»)
var priceInfo = option.querySelector(priceNS + «.price-info»)
если (allOptionsInitiallyCollapsed || узкаяBuyboxArea && индекс > 0) {
toggle.setAttribute («ария-расширенная», «ложь»)
form.hidden = «скрытый»
priceInfo.hidden = «скрытый»
} еще {
переключить.щелчок()
}
})
}
начальное состояниеОткрыть()
если (window.buyboxInitialized) вернуть
window.buyboxInitialized = истина
initKeyControls()
если (window.
slice.call(buybox.querySelectorAll(«.опция покупки»)).forEach(функция (опция, индекс) {
var toggle = option.querySelector(priceNS + «.buying-option-price»)
var form = option.querySelector(«.форма-варианта-покупки»)
var priceInfo = option.querySelector(priceNS + «.price-info»)
если (allOptionsInitiallyCollapsed || узкаяBuyboxArea && индекс > 0) {
toggle.setAttribute («ария-расширенная», «ложь»)
form.hidden = «скрытый»
priceInfo.hidden = «скрытый»
} еще {
переключить.щелчок()
}
})
}
начальное состояниеОткрыть()
если (window.buyboxInitialized) вернуть
window.buyboxInitialized = истина
initKeyControls()
если (window.