| XB Н | ZAН | ZBН | PН | |
| 716,5 | 134 | -1658 | 1435 | 750 |
 Fkx =0 (1)
Fkx =0 (1)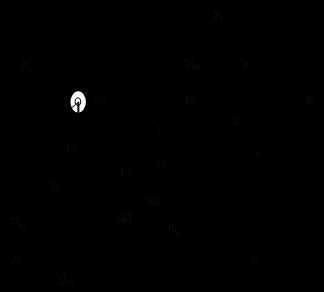 Проверка:
Проверка: 


mirznanii.com
Определение реакций опор составной конструкции
Задание С-3. Определение реакций опор составной конструкции
Вариант № 1.
Найти реакции опор и давление в промежуточном шарнире составной конструкции. Схема конструкции представлена на рис. 1 (размеры – в м), нагрузка указана в таблице 1.
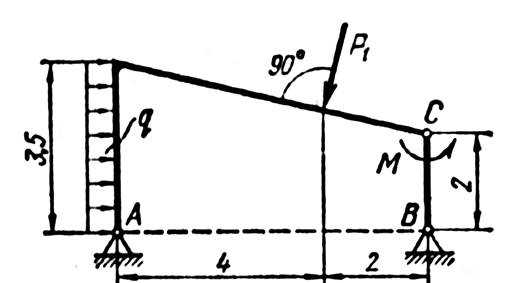
Рис. 1
Таблица 1.
С-3. Определение реакций опор составной конструкции
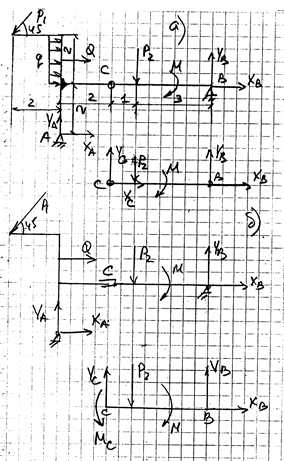
Решение. Рассмотрим систему уравновешивающихся сил,
 приложенных ко всей конструкции (рис. 2).
приложенных ко всей конструкции (рис. 2).y
P1y P1
90°
P1x C
Q M
RAy RBy
RAx RBx x
A B
Рис. 2.
Разложим силу P на составляющие Px и Py.
P1y P1
a
P1x aa
6
Рис. 3.
P1x = P1×sin(a),
P1y = P1×cos(a).
a = arctg(1,5/6) = arctg(0,25) = 14°.
P1x = P1×sin(a) = P1×sin(14°) = 6×0,24 = 1,44 (кН),
P1y = P1×cos(a) = P1×cos(14°) = 6×0,97 = 5,82 (кН).
Q = q×3,5 = 0,8×3,5 = 2,8 (кН).
С-3. Определение реакций опор составной конструкции.
Запишем уравнения равновесия:
(1) (2) (3)Данная система из 3 уравнений содержит 4 неизвестных, для их нахождения рассмотрим отдельно правую и левую части конструкции.
Рассмотрим систему уравновешивающихся сил, приложенных к левой части конструкции (рис.4):
 y
yP1y P1
90°
P1x C
RCx
Q RCy
RAy
RAx x
A
Рис. 4.
Запишем уравнения равновесия:
(4) (5)С-3. Определение реакций опор составной конструкции
(6)Рассмотрим систему уравновешивающихся сил, приложенных к правой части конструкции (рис.5):
y
R`Cy
R`Cx
C
M
RBy
RBx x
B
Рис.5.
Запишем уравнения равновесия:
(7) (8) (9)где RCx = R`Cx, RCy = R`Cy.
Таким образом, имеем систему 4 уравнений (1), (2), (6) и (9) с 4 неизвестными.
Из уравнения (9)
Из уравнения (1)
С-3. Определение реакций опор составной конструкции
Из уравнения (6)
Из уравнения (2)
Найдем реакции шарнира С:
RCx = -RBx = 12,5 кН,
RCy = -RBy = 0,07 кН.
Отрицательные значения RBx и RBy говорят о том, что действительное направление RBx и RBy противоположно указанному на рис.4.
Итак,
С-3. Определение реакций опор составной конструкции

Найти реакции опор конструкции изображенной на рис.1.
Составим уравнения сумм моментов относительно всех осей:
Р*15-q*5=0, где , отсюда Р=(q*5)/15
-qx*20+P*60-RBx*80, отсюда RBx=(qx*20-P*60)/80
-qx*20-G*(20+30)+RBz*(20+30+30) отсюда RBz= (qx*20+G*50)/80
-Raz*80+qz*60+G*30=0 отсюда Raz= (qz*60+G*30)/80
Rax*80+ qx*60-P*30=0 отсюда Rax=-( qx*60-P*30)/80
qx=Q*cos45; qz=Q*sin45
Ra= RB=
Результаты работы
Применение теоремы об изменении кинетической энергии к изучению движения механической системы.
Вариант № 1.
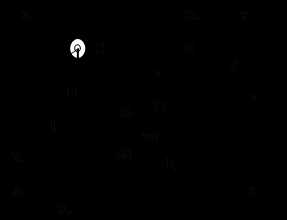
Механическая система под действием сил тяжести приходит в движение из состояния покоя; начальное положение системы показано на рис. 1. Учитывая трение скольжения тела 1, пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить скорость тела 1 в тот момент, когда пройденный им путь станет равным s.
В задании приняты следующие обозначения: m1, m2, m3, m4 – массы тел 1, 2, 3, 4; b — угол наклона плоскости к горизонту; f – коэффициент трения скольжения.
Необходимые для решения данные приведены в таблице 1. Блоки и катки считать сплошными однородными цилиндрами. Наклонные участки нитей параллельны соответствующим наклонным плоскостям.
Рис. 1
Таблица 1.
Решение.
Применим теорему об изменении кинетической энергии системы:
(1)где T0 и T – кинетическая энергия системы в начальном и конечном положениях;
— сумма работ внешних сил, приложенных к системе; — сумма работ внутренних сил системы.Для рассматриваемых систем, состоящих из абсолютно твердых тел, соединенных нерастяжимыми нитями,
Так как в начальном положении система находится в покое, то Т0=0.
Следовательно, уравнение (1) принимает вид:
(2)Кинетическая энергия рассматриваемой системы Т в конечном ее положении (рис.2) равна сумме кинетических энергий тел 1, 2, 3 и 4:
Т = Т1 + Т2 + Т3 + Т4. (3)
 2
21
w2
VA
V3
3 b V1
A C3 CV
w3
V4
4
Рис. 2.
Д-10
Кинетическая энергия груза 1, движущегося поступательно,
(4)Кинетическая энергия барабана 2, совершающего вращательное движение,
, (5)где J2x – момент инерции барабана 2 относительно центральной продольной оси:
w2 – угловая скор
mirznanii.com
Реакции опор — Нахождение — Энциклопедия по машиностроению XXL
Определив реакции опор, переходим к нахождению усилий в стержнях. Обозначим стержни цифрами /, 2, 3,. .., 7. [c.139]Сопоставляя оба способа решения, видим, что первый способ позволяет прямым путем определить возможные положения равновесия системы и характер устойчивости этих положений равновесия. Однако этот способ не приводит к нахождению реакций опор. Второй способ позволяет непосредственно определить возможные положения равновесия системы и соответствующие им реакции опор, но не оценивает устойчивости равновесия системы и характер устойчивости этих положений равновесия. [c.585]
Стол остается в равновесии на гладком горизонтальном полу под действием силы тяжести и четырех неизвестных вертикальных реакций опоры. Для определения этих реакций имеется лишь три условия равновесия твердого тела, что делает задачу нахождения реакций статически неопределимой. [c.358]
После нахождения неизвестных Х и Х , которые в этом случае являются реакциями опоры А, остальные реакции определяем из уравнений равновесия [c.25]
Заданная система имеет одну лишнюю связь, за которую проще всего принять опору А (рис. 7-35,а). Раскрытие статической неопределимости сведется к нахождению лишней неизвестной (реакции опоры А) из канонического уравнения [c.165]
После нахождения неизвестных Х и которые в этом случае являются реакциями опоры А, остальные реакции определяем из уравнений равновесия 1х = 0,Х1-20-3 + Нс=а, откуда Нс= ЬО — X, = 5 Л9 = О, Яв-З + 20 3-1.5 — Хгб = о, Да = 14.68 кН [c.71]
Пример нахождения осевых реакций опор, в представленной на рис. 26 расчетной схеме обозначены Fa и — внешние осевая и радиальная нафузки, действующие на вал Fr и Ffj — радиальные реакции опор Fa и Fa2 — осевые реакции опор. [c.124]
Определение реакций опор для двухопорной балки необходимо, так как рассечение ее приводит к образованию таких двух частей, которые взаимодействуют с опорой. Для нахождения реакций опор отбросим опоры и заменим их действие на балку ре- [c.189]
При нахождении реакций опор и построении эпюр учтем, что F,, Fr, Fa — силы, меняющие положение относительно вала, а сила F t не меняет положение относительно вала. [c.105]
Пример нахождения осевых реакций опор. В представленной на рис. 2.30 расчетной схеме обозначены и — внешние осевая и радиальная нагрузки, действующие на вал Fr и — радиальные реакции опор 1 и Fat — осевые реакции опор. [c.225]
После нахождения значений изгибающих моментов в сечениях неразрезной балки, находящихся над опорами, из уравнений равновесия легко определить реакции. Вновь рассматривая два смежных пролета (рис. 7.15, ), предположим, что и являются реакциями опоры В для двух свободно опертых балок ЛВ и ВС. Их сум- [c.290]
Для нахождения силы Рп, действующей в тяге к приводу ВГ, рассмотрим равновесие рычагов ОБ и ОВ, жестко закрепленных на валу О, под действием трех сил силы Q в изолирующей тяге АБ, силы Рв в тяге ВГ к приводу и реакции в опоре вала О. Силу Q мы нашли. Сила Ри направлена вниз по оси тяги ВГ. Продолжим линию ВГ до пересечения с осью тяги АБ и отложим по этой оси силу Q. Линия действия реакции опоры проходит через центр вала О и точку пересечения линий действия [c.48]
Для нахождения перемещения приложим к опоре А силу Я = 1 (фиг. 411, б). Определив реакции опор, строим эпюру изгибающих моментов от единичной силы. [c.412]
Граничные условия дают необходимое количество уравнений и для определения постоянных интегрирования, и для нахождения реакций опор. Этот факт может быть доказан для произвольного случая. [c.524]
Усилия, возникающие между колесом и рельсом при ходе экипажа по кривой, определяют по схеме нахождения реакции опор жёсткой балки, лежащей на двух опорах, или реакции опоры рычага, нагруженных силами трения, возвращающими силами сцепных осей (если они есть) или тележек, центробежной силой, составляющей веса от возвышения наружного рельса. [c.304]
Второе из них следует из уравнений равновесия (4.7). Если шарнир попадает в место действия сосредоточенной нагрузки (сюда относится п реакция опор), то действует только первое из условий (4.8), но зато координата шарнира известна. Таким образом, можно заключить, что при общем индексе п статической неопределимости в схему разрушения надо ввести п- — пластический шарнир. Появляющихся при этом условий (4.8) достаточно для нахождения как координат шарниров, так п для определения предельной нагрузки. [c.104]
Разберем построение эпюры изгибающих моментов для подкосного крыла, считая, что нагрузка по размаху распределяется в общем случае по закону трапеции (фиг. 104). Вертикальная нагрузка будет восприниматься двумя опорами А и В. Для нахождения реакции опор составим условия равновесия моментов и сил относительно опоры А [c.136]
МНОГОУГОЛЬНИК ВЕРЕВОЧНЫЙ (Вариньона многоугольник), построение графической статики, к-рым можно пользоваться для определения линии действия равнодействующей плоской системы сил, для нахождения реакций опор, изгибающих моментов в сечениях балки, положений центров тяжести и моментов инерции плоских [c.423]
Лишние (или дополнительные) силы, которые не являются необходимыми для поддержания конструкции в состоянии равновесия. Вновь обращаясь к двухпролетной балке (рис. 7.6, а), видим, что если выбрать в качестве лишней неизвестной реакцию средней опоры и устранить ее из конструкции, убрав саму эту опору, то конструкция не превратится в механизм, как показано на рис. 7.6, Ь. Или, в случае балки, представленной на рис. 7.7, а, можно устранить моменты на обоих концах, сняв ограничения на повороты, и полученная при этом конструкция (рис. 7.7, Ь) снова сохранит равновесие. Статически определимая конструкция, которая остается после отбрасывания лишних неизвестных (путем устранения соответствующих опор или ограничений), называется выделенной (или основной) системой. Ключевым моментом в исследовании статически неопределимой конструкции методом податливостей является нахождение выделенных лишних неизвестных, поскольку как только они станут известными, остальные. силовые факторы можно будет определить из уравнений равновесия. [c.454]
Неподвижная защемляющая опора или жесткая заделка (рис. 62). В этом случае на заделанный конец балки со стороны опорных плоскостей действует система распределенных сил реакций. Считая эти силы приведенными к центру А, мы можем их заменить одной наперед неизвестной силой Ял, приложенной в этом и парой с наперед неизвестным моментом Жд. Силу в свою очередь изобразить ее составляющими Л д и Уд. образом, для нахождения реакции неподвижной заземляющей надо определить три неизвестных величины Х , Уа и под такую балку где-нибудь в [c.67]
Рассмотрим задачу о нахождении опорных реакций трехшарнирной арки, которая состоит из двух частей, М и М, имеющих шарнирные опоры Л и В и соединенных между собой идеальным шарниром С (рис. 5.15, а). Если рассматривать эту систему тел как одно твердое тело (аксиома 5), то будем иметь три уравнения равновесия с четырьмя неизвестными Хд, Кд, в. Ув (проекции опорных реакций в точках Л и В). [c.78]
На основании вышеприведенных данных найдем реакции в опорах системы 2 , перемещения в опорах и отклонения относительного движения. Для нахождения реакций в опорах сначала определим проекции вышеперечисленных сил и моментов на координатные оси систем 2 и 2 (см. рис. 1.41). [c.115]
Рассмотрим два примера определения реакций в опорах с радиально-упорными подшипниками. На рис. 8.31, а вал цилиндрического прямозубого редуктора установлен на двух конических подшипниках. Нахождение радиальных реакций / 1 и выполняется общими методами. На рисунках эти реакции показаны условно без учета действительного направления. [c.258]
Точность 1006 Опоры — Реакции — Нахождение 111, 116—118 [c.1124]
Фиктивный изгибающий момент на опоре В можно вычислить без предварительного нахождения опорных фиктивных реакций [c.322]
Ходовые опорные балки рассчитывают на изгиб от веса крана и реакции от груза при его нахождении у опоры. [c.287]
Д в у X Ш а р н и р п ы е арки имеют одну статически неопределимую величину, т. К, для нахождения четырех неизвестных опорных реакций (по две на каждой опоре) имеем только три ур-ия статики. Опорные реакции, возникающие от нек-рой произвольной нагрузки, показаны на фиг. 16. Они раз- [c.462]
Для нахождения горизонтальных опорных реакций Рои составим равенство моментов относительно нижней опоры, Н, [c.142]
При нахождении напряжений на коренных шейках пользоваться схемой (фиг. 71) можно лишь для последней коренной шейки, для промежуточных же нужно определить (геометрическим сложением) суммарную силу реакции /С, возникающую на данной опоре от правого и левого колена. [c.180]
Для нахождения сил реакции на опорах мысленно разрезаем вал на двухопорные балки с опорными моментами на концах, как показано на фиг. 77, слева внизу. Тогда силы реакции Р найдутся из уравнений [c.182]
Однако учет наличия промежуточной опоры становится необходимым в коленчатых валах звездообразных двигателей для нахождения силы реакции на промежуточном подшипнике. Решение этой задачи проводится обычным методом трехопорной балки . Полагая, что прогиб вала под средней опорой от действующей силы уничтожается силой [c.183]
Для нахождения реакций опор вращающегося твердого тела применим принцип Да-ламбера, присоединяя к действующим на тело реальным силам фиктивные силы инерции. [c.399]
Для нахождения реакций на коренных шейках (при расчете коленчатого вала) обычно принимают валза.разрезную балку с разрезами по серединам коренных шеек. Тогда для симметричных колен реакции опор [c.29]
Задача о нахождении этих собственных частот в общем случае должна ставиться с учетом податливости опор и притом различной в разных направлениях (но без учета неконсервативных сил реакции масляного клина), а также с учетом гироскопического эффекта диска. Эта задача, см. уравнение (II. 34), не сводится к нахождению собственных частот изгибных колебаний невраща-ющегося ротора. [c.62]
На степень уравновешенности большое влияние оказывает жесткость вращающегося тела и его опор. Метод динамической жесткости применительно к задаче нахождения критической скорости валов на упругих опорах получил широкое развитие в работах А. Н. Огуречникова и Н. И. Котерова [1 ]. Используя основные положения этого метода, определим допустимую величину прогиба вала и его реакций на опорах с целью учета этого прогиба при назначении допуска на уравновешивание. [c.496]
Для нахождения длин безопасных участков составим две расчетные схемы, отвечающие двум положершям критического равновесия человека на доске. Первая схема показана на рис. б. Человек стоит на некотором, пока неизвестном, критическом расстоянии от левого края С левой опоры D, находясь слева от точки С. Опрокидывание в этом случае может произойти вокруг точки С. В положении критического равновесия доска не имеет опоры на правый стропильный брус и, следовательно, реакция правого бруса равна нулю. На левый брус доска опирается в точке С. Составляем уравнение моментов относительно точки С. В уравнение входят момент силы тяжести человека и момент силы тяжести доски [c.62]
Эскизная компоновка редуктора — ориентировочное определение расстояния между опорами и положения зубчатых колес с целью нахождения опорных реакций, действующих на подшипники. В связи с небольшой скоростью зубчатой передачи (V = 3,4 м/с) принимают пластичный смазочный материал для подшипников подшипники отделяют от полости корпуса маслоудерживающими кольцами. Для зубчатых колес выбирается масло, заливаемое в корпус редуюора. Намечают для валов конические роликоподшипники средней серии с диаметром посадочного отверстия, определенным выше. [c.484]
Между тем, импульс силы, приложенной к неподвижной точке, не равен пулю. Также не обран ается в нуль импульс той силы, которая перпендикулярна к перемещению. Следовательно, эти два разряда сил не исчезают из уравнения количеств движения. Напрнмер, реакции неподвижных опор будут входить в эти уравнения явным образом. Поэтому уравнение количеств движения может быть применяемо для нахождения таких реакций, и в этом состоит его значение для приложений. Уравнение живых сил для такой [1ели вовсе непригодно, так как реакции в него совсем не входят. [c.181]
Эти два способа расчета, хотя и непосредственно связаны между собой в том отношении, что без силового воздействия на звенья не может быть и самого движения, а характер движения определяется геометрией построения механизма, тем не менее могут рассматриваться независимо один от другого. Так, например, в ФП, на которой основывается первый способ нахождения КВ, не входят какие-либо характеристики силового воздействия на механизм, а расчет направления и величин реакций в опорах, на которых основывается второй спосрб, производится путем разбиения кинематической цепи механизма на группы нулевой подвижности без непосредственного учета ФП. [c.113]
При наличии на балке подвижной нагрузки (от поезда, кранов, толпы, автомобилей и т. п.), могущей занимать любое положение в пролете, нахождение наибольших значений реакций, поперечных сил и мо.ментов в любом сечении сопряжено с предварительным установлением невыгодного положения нагрузки, что проще всего выполняется помощью линий влияния (см.). Линии влиянияобычно строятся от одного сосредоточенного грува Р — V, при расположении груза на расстоянии X от левой опоры балки (фиг. 4, о) величина левой реакции будет [c.131]
Для случая нескольких масс решение будет аналогичным. Кроме идеи сведения изучения движения тела к изучению его равновесия с учетом сил инерции, Я. Бернулли высказал мысль о возможном определении реакции связи. Истинное движение 161 ( 2 2) он разложил на свободное а 0 а2Я) и движение O l Qb2) вдоль стержня. Каждому движению он ставит в соответствие силу. Вертикальному движению alO a2Q), естественно, соответствует сила тяжести, а сила, соответствующая движению вдоль стержня, уравновешивается опорой А. По современным представлениям — реакцией связи. Ученик Я. Бернулли — Якоб Германн дал иную интерпретацию идеи использования сил инерции. В наиболее известном сочинении Форономия или две книги о силах и движениях твердых и жидких тел [200], решая задачу о нахождении центра колебаний физического маятника, он разлагает силу тяжести каждой материальной точки на две составляющие одна направлена по линии подвеса, другая — перпендикулярно [c.137]
Теорша о взаимности работ и пе р1ёмещений весьма полезна в задачах о нахождении наиболее неблагоприятного положения подвижной нагрузки в статич ки неопределимых конструкциях. Примером является рис. 300, который изображает балку с одним задранным, концом и со свободно опертым другим и несущую сосредоточенный груз Я. Задача заключается в TQM, чтобы найти изменение величины реакции X qj левой опоры при изменении расстояния X груза от этой опоры. Примем действительное состояние балки (рис. 300,а) за первое состояние загружения. Вто- f рое, или фиктивное, состояние показа bj f нона рис. 300,6, Внешняя нагрузка и лишняя опора отброшены и вместо не- J h . 300. [c.299]
Если твердое тело опирается иа большое число опор, то задача нахождения реакций может оказаться статически неопределенной. Такова, иапрнмер, балка, изображенная на рнс. 5.20, а. Очевидно, что трех уравнешй равновесия недоста точно для определения пяти реакций, т. е. система статически неопределимая [c.74]
mash-xxl.info