При работе большинства машин возникают динамические нагрузки, обусловленные неуравновешенными силами инерции. Эти силы могут вызвать недопустимые колебания строительных конструкций и оказать вредное действие на организм человека. Допускаемые амплитуды виброперемещения по ГОСТ 12.1.12 – 78 [3] приведены в табл.7.2.
Таблица 7.2. Допускаемые значения амплитуды виброперемещения
Для уменьшения колебаний строительных конструкций и расположенных на них рабочих мест машины, возбуждающие динамические нагрузки, устанавливают на массивные фундаменты. Массу фундамента подбирают таким образом, чтобы колебания подошвы фундамента не превышали (по виброперемещению) установленных для заданной частоты величин. Расчет фундамента под виброплощадки сводится: · К проверке амплитуд виброперемещения вынужденных колебаний фундамента; · К определению давлений, передаваемых фундаментом на грунт (табл.7.3., табл.7.4.)
Таблица 7.3. Основные характеристики грунтов
Таблица 7.4. Основные характеристики грунтов
· к проверке собственной частоты колебаний фундамента (собственная частота колебаний фундамента должна отличаться от частоты вынужденных колебаний не менее чем в 1,5 раза). Нормативная динамическая нагрузка N от виброплощадки, возбуждаемая механическими вибраторами с вращающимися эксцентричными массами (дебалансами), определяется как центробежная сила
m – масса вращающейся части машины (дебаланса), кг; r – экцентриситет вращающихся масс, см; w — круговая частота вала машины, с—1. При использовании дебалансных вибраторов нормативную динамическую нагрузку определяют по формуле
Мк=m*r – кинетический момент одного вибратора, Н*см; g – ускорение свободного падения, см/с2.
Рассчитаем динамическую нагрузку N при следующих условиях: · Максимальная грузоподъемность площадки 5 т · Габарит 6269*1780*1020 мм · Вес общий 74200 Н, в том числе подвижных частей Qпч=62780Н · Мощность привода 28 кВт · Частота вращения 3000 мин—1 · Максимальный кинетический момент дебалансов М=2900Н*см · Амплитуда виброперемещения стола 0,4 мм · Частота вибрирования f=50Гц Фундамент устанавливают на суглинок средней пористости с допускаемым нормативным давлением R=3*105 Па Виброплощадка двухвальная, нормативная возмущающая сила действует в вертикальном направлении. Виброизоляция выполнена в виде 8 цилиндрических стальных пружин. w=2*p*f=314 с—1
N=Mk*w2/g=2900*3142/980=291760 Н
Предполагаем, что виброплощадка опирается на фундамент через стальные пружинные амортизаторы, дающие под действием подвижных (подрессоренных) частей установки статическую осадку lст=0,5см. Суммарная жесткость всех амортизаторов
К=Qпч/lст=62780/980=125560 Н/см
Рассчитываем собственную круговую частоту вертикальных колебаний подрессоренных частей виброплощадки w0 и массу подвижных частей вибро площадки mпч
Определяем нормальную динамическую нагрузку, передающуюся на фундамент
исходя из известного опыта проектирования фундаментов под машины с динамическими нагрузками конструктивно принимаем площадь F ф и высоту фундамента так, чтобы вес фундамента примерно в 2 раза был больше общего веса виброплощадки:
Qф=140000 Н;
Fф=640*180=115200 см2
Масса фундамента
mф= Qф/g=140000/980=142 Н*с2/см=142 кг
Рассчитываем коэффициент жесткости естественного основания при ранее выбранном грунте: суглинок средней пористости с допускаемым нормативным давлением R=3*105 Па, cz=50 Н/см2
Kz=Fф*cz=115200*50=576*108 Па
Определяем круговую частоту собственных вертикальных колебаний фундамента
Рассчитываем амплитуду перемещения фундамента под действием динамической силы
0,007<aдоп=0,009 мм (см.
Таким образом, при работе виброплощадки амплитуда виброперемещения фундамента не превышает допускаемой величины.
Для уменьшения вибрации на рабочем месте оператора используем резиновые виброизоляторы с коэффициентом передачи m=(1/5)…(1/12). Измеренная виброскорость на рабочем месте составляет 8…10 мм/с на частотах 16; 31,5 и 63 Гц, что выше нормы в 4…5 раз. Пост управления оператора с весом Рпульта=200 Н расположен на стальной плите габаритом 1200*1200*10 мм. Масса плиты mплиты=Vp ,
V – объем, см3, r=7,8 г/см3, плотность стали,
mплиты=(120*120*1)*7,8=112,3 кг
Вес плиты
Рплиты=1123 Н
Частоты вынужденных колебаний перекрытия принимаем равным 16, 31, 63 Гц. Для изготовления виброизоляторов используем резину на каучуковой основе №3311 с твердостью по ГОСТ 263-75 [6] равной 3*105 Па и динамическим модулем упругости равным 25*105 Па или 250 Н/см2. Основные характеристики распространенных резин приведены в табл.7.4.
Таблица 7.5. Основные характеристики резины
Определим площадь поперечного сечения всех виброизоляторов, S, см2, и рабочую высоту каждого виброизолятора Нр, см:
S=P/s;
Нр=Ед*S/K.
Р – общий вес виброизолированной установки, Н s — расчетное статическое напряжение в резине, Па Ед – динамический модуль упругости резины, Па К – требуемая суммарная жесткость виброизоляторов, Н/см
Требуемая суммарная жесткость всех виброизоляторов в вертикальном направлении К=4*p 2*f20доп*Р/g
g– ускорение свободного падения, 980 см/см2 f20доп – допустимая частота собственных вертикальных колебаний
Для вычисления f0доп необходимо предварительно вычислить акустическую эффективность виброизоляции
DL=20lg(1/m)
Виброизоляция для механического оборудования должна обеспечить получение DL не менее величин, приведенных ниже в табл.7.5.
Таблица 7.6.
При выполнении этих требований использование виброизоляции обеспечивает удовлетворительные акустические условия в смежных помещениях. В нашем случае по условиям виброзащиты рабочего места достаточная вибрация с m=1/10. тогда DL=20 дБ. Зная DL и наибольшую частоту вынужденных колебаний f=63 Гц по графику (Рис.7.1.) определяем допустимую частоту собственных вертикальных колебаний f0доп=8 Гц. Общий вес виброизолированной установки
Р=Рплиты+Рпульта+Рчел=1123+200+800=2123 Н.
Тогда К=4*3,142*82*2123/980=5220 Н/см.
Определяем площадь всех виброизоляторов и рабочую высоту резинового виброизолятора, приняв s=3*105 Па=30 Н/см2.
S=2123/30=70,6 см2;
Нр=250*70,6/5220=3,38 см.
Определяем площадь поперечного сечения одного виброизолятора, принимая 4 виброизолятора S’=70,6/4=17,65 см2. принимаем сечение виброизолятора квадрат со стороной 4,5 см, S’=20,25 см2. резиновые виброизоляторы сохраняют устойчивость при выполнении условий
Нр<d<1,5Нр,
d – диаметр или сторона квадрата сечения,
3,38<4,5<5,07
Таким образом выбранные виброизоляторы сохраняют устойчивость от опрокидывания в процессе эксплуатации. Определяем полную высоту
Н=Нр+(d/8)=3,38+(4,5/8)=4 см
Теперь определим фактическую виброизолирующую способность резиновых виброизоляторов принятых геометрических размеров на различных частотах вынужденных колебаний. Вычислим коэффициент передачи для f=16; 31; 63 Гц.
К=Ед*S/Нр=250*70,6/3,38=5222 Н/см
f0=(1/2*p)*=7,8 Гц
Определяем коэффициент передачи для различных частот вынужденных колебаний: При f=16 Гц При f=20 Гц При f=31 Гц При f=63 Гц
Спроектированная система виброизоляции, выполненная на четырех резиновых виброизоляторах высотой 4 и шириной 4,5 см дает уменьшение виброскорости, передаваемой на рабочее место оператора, от 3 до 63 раз. Вибрация на рабочем месте оператора на частотах 16 и 20 Гц не превысит гигиеническую норму, а на частотах 31 и 63 Гц будет значительно ниже нормы.
<< К оглавлению Дальше>> | ||||||||||||||||||||||||||||

 .3
.3



Проектирование блочной виброплощадки с вертикально направленными гармоническими колебаниями
Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Государственное общеобразовательное учреждение высшего профессионального образования
«Ивановский государственный архитектурно-строительный
университет»
Инженерно-строительный факультет
Кафедра строительного материаловедения и специальных технологий
Пояснительная записка к курсовому проекту по курсу
«Механическое оборудование предприятий строительной индустрии»
на тему:
«ПРОЕКТИРОВАНИЕ
БЛОЧНОЙ ВИБРОПЛОЩАДКИ С
Выполнил: студентка группы
ПСК-41 Степанова Е. А.
А.
Руководитель проекта: Карпов Д.А.
Иваново, 2013 г.
СОДЕРЖАНИЕ.
ВВЕДЕНИЕ 4
ЗАДАНИЕ НА КУРСОВОЙ ПРОЕКТ 6
РАСЧЕТ РАБОЧИХ ПАРАМЕТРОВ ВИБРОПЛОЩАДКИ 7
1. Определение массы вибрирующих частей 7
2. Расчет дебалансов виброгенератора 7
3. Расчет подшипников качения в виброгенераторах на динамическую грузоподъемность 8
4. Расчет и проектирование упругих опор 9
5. Расчет привода
6. Расчет устройства для крепления форм 14
ТЕХНИКА БЕЗОПАСНОСТИ И ОХРАНА ТРУДА 16
БИБЛИОГРАФИЧЕСКИЙ СПИСОК 18
ВВЕДЕНИЕ.
Формование один из важнейших
технологических процессов при
изготовлении изделий сборного железобетона,
во многом определяющий свойства будущего
изделия (прочность, морозостойкость,
качество поверхности и др. ).
).
В заводских условиях наибольшее распространение получил метод объемного виброформования изделий с помощью виброплощадок, предназначенных для установки форм с бетоном и передачи формам колебаний для уплотнения бетонной смеси. Существует множество разновидностей виброплощадок.
Широко применяются
В данном курсовом проекте
рассчитывается такая виброплощадка.
Виброплощадка состоит из отдельных виброблоков,
связанных между собой карданными валами,
вращение которых осуществляется от двигателя
через синхронизатор. Двигатель соединен
с синхронизаторами и смонтирован на отдельной
платформе, закрепленной на фундаменте. Виброблок состоит из соединенных между
собой с помощью болтов, электромагнита,
вибровозбудителя и двух кронштейнов,
которые через опорные пружины опираются
на раму.
Виброблок состоит из соединенных между
собой с помощью болтов, электромагнита,
вибровозбудителя и двух кронштейнов,
которые через опорные пружины опираются
на раму.
Пружинная опора состоит из основной и вспомогательной пружины, соединяемых с помощью болта, гайки, шайб и втулок с опорной рамой. Электромагнит служит для крепления формы к виброблоку, представляет собой корпус, в котором размещена катушка, причем в пространство между катушкой и корпусом залит специальный эпоксидный раствор (состав) или битумная масса. Синхронизатор служит для обеспечения синхронного вращения двух или четырех дебалансных валов.
В данном курсовом проекте
производиться расчет виброплощадки,
состоящей из двух виброблоков. Так как
ширина вибрируемого изделия составляет
1500 мм, а длина 3000 мм, то конструктивно
принимаем виброплощадку с одной линией
(два виброблока в один ряд). В виброблоках
каждый виброгенератор снабжен четырьмя
дебалансами. Для работы виброплощадки
используется один двигатель.
ЗАДАНИЕ.
Спроектировать блочную виброплощадку с вертикально направленными гармоническими колебаниями, если имеем массу изделия mизд = 1560 кг, амплитуду колебаний , частоту колебаний , количество виброгенераторов расстояние между виброплощадками .
Формуемое изделие
Плиты дорожные ПДП
3х1,5 (2П30-15-30), предназначенные для устройства
сборочных покрытий постоянных и временных
городских дорог под автомобильную нагрузку
H-30 . Плиты дорожные ПДП
(2П30-15-30) железобетонные предварительно
напряженные и плиты с ненапрягаемой
арматурой изготовляются
из тяжелого бетона. Плиты дорожные ПДП
(2П30-15-30) применяют для дорог в районах
с расчетной температурой наружного
воздуха до минус 40°С включительно.
Плиты дорожные ПДП (2П30-15-30) (описание) | ||
класс бетона по прочности на сжатие | В22. | |
марка бетона по морозостойкости | F200 | |
плотность | 2400 кг/м3 | |
прочность бетона |
294,5кг/см2 | |
марка бетона по | W4 | |
 5
5
Технические характеристики
железобетонных дорожных плит ПДП | ||
|
Плита дорожная ПДП железобетонная для временных дорог | |
Размеры | длина 3000 мм, ширина 1500 мм; высота 160 мм | |
Условное обозначение плиты для временных дорог,
прямоугольной, длиной 3000 и шириной 1500
мм, рассчитанной под автомобиль
массой 30 т, с ненапрягаемой арматурой: 2П30-15-30
№ | Марка, тип изделия | Длина | Ширина | Высота | Нагрузка | Вес |
1 | 2П30-15-30 | 3000 | 1500 | 160 | 30т\ось | 1 560 |
Виброблок = 2 виброгенератора
Общее количество виброблоков
Количество дебалансов у одного виброблока ;
Общее количество дебалансов:
.
РАСЧЕТ РАБОЧИХ ПАРАМЕТРОВ ВИБРОПЛОЩАДКИ.
Исходные данные: масса вибрируемой бетонной смеси:
Амплитуда колебаний , частота колебаний , количество виброблоков .
1. Определение массы вибрирующих частей.
Масса формы:
Масса колеблющихся частей:
Приведенную массу формуемого изделия находим по формуле:
Массу вибрирующих частей определим по формуле:
2. Расчет дебалансов виброгенератора.
Вычислим необходимый статический момент массы дебалансов, который определим по формуле:
Необходимый статический момент одного дебаланса рассчитываем по формуле:
Внутренняя сила одного дебаланса находится по формуле:
Находим ориентировочный внутренний диаметр подшипников вала виброгенератора по формуле:
Определяем радиус и ширину дебаланса по следующим соотношениям:
RЦ = 80(мм) rД = 35(мм) dВ = 40(мм) RД = 120(мм) |
Рис. 1. Схема цилиндрического
дебаланса со смещенной осью
1. Схема цилиндрического
дебаланса со смещенной осью
Исходя из приложения [8, с.27] и учитывая ранее найденный диаметр дебалансного вала, подшипник подбираем по таблице 2П [8, с.30] подшипников качения, габаритные размеры роликового радиального подшипника: N3608, , , , .
3. Расчет подшипников качения в виброгенераторах на динамическую грузоподъемность.
При расчете эквивалентной динамической нагрузки используют следующую зависимость:
Требуемую динамическую грузоподъемность определяют по формуле:
где — находим по таблице 1П [8, с.29] при частоте вращения вала:
,
и долговечности =4000 часов.
Сравнение значений и показывает, что предварительно выбранный подшипник N3618 не имеет достаточный запас по динамической грузоподъемности:
Следовательно, выбираем роликовый радиальный подшипник N3614, , , ,
Далее рассчитаем требуемый статический момент дебаланса толщиной , то есть
По полученным значениям
и
в таблице 1 [8, с. 16] находим ближайшее значение
внешнего радиуса дебаланса
, тогда радиус окружности, описываемый
крайней точкой дебаланса при его вращении,
примет следующее значение:
16] находим ближайшее значение
внешнего радиуса дебаланса
, тогда радиус окружности, описываемый
крайней точкой дебаланса при его вращении,
примет следующее значение:
Расстояние между осями дебалансных валов двухвального виброгенератора определим по формуле:
4.
Расчет и проектирование
Требуемую жесткость всех опор определяют по формуле:
В последней формуле имеем: — максимальная деформация упругих опор под нагрузкой, ; — минимальное из рекомендуемых соотношений собственной частоты вибросистемы и частоты вынуждающей силы.
Принимаем значение суммарной жесткости опор , тогда фактическая максимальная деформация упругих опор принимает следующее значение:
Рис. 2. Виброблок:
1 – электромагнит; 2 – виброгенератор; 3 – кронштейн; 4 – болт; 5 – основная пружина; 6 – вспомогательная пружина; 7 – болт; 8 – гайка.
В качестве упругих опор,
в основном, используются винтовые
цилиндрические пружины сжатия, собираемые
в пакеты. Жесткость всех основных
(нижних) пружин определяется как:
Жесткость всех основных
(нижних) пружин определяется как:
Определяем жесткость одной нижней (основной) пружины:
где — количество нижних (основных) пружин.
При жесткость одной верхней (вспомогательной) пружины выразиться:
Максимальная деформация основных пружин выразиться:
где — амплитуда колебаний при переходе через резонанс, — возможная деформация пружин в период монтажа для установки всех опор в одной плоскости, обычно в одной плоскости, обычно .
Определяем максимальную деформацию верхней (вспомогательной) пружине по формуле:
С другой стороны, деформация
вспомогательной пружины в
Из двух значений наибольшим является второе, поэтому принимаем .
Размеры пружин определяются по таблице 2 [8, с.16]. При этом необходимо вычислить для обеих пружин параметр , характеризующий напряжение в них при единичной нагрузке:
Здесь
— предел прочности для материала пружины.
Любое значение среднего диаметра пружины и диаметра прутка пружины , для которых в таблице 2 [8, с.16] равно найденным значения величин или несколько меньше их, обеспечить достаточную прочность пружины, при этом, количество витков пружине должно находиться в рамках .
В качестве основной пружины используем пружины следующих параметров: , , , , количество витков определим:
Как вспомогательную пружину выбираем пружину с , , , , тогда количество витков :
Определяем диаметр стяжного болта, из расчета на растяжение максимальным усилием, действующим на болт при ненагруженной виброплощадке, в случае регулировки высоты опоры при монтаже:
где — усилие растяжения болта:
а — допустимое напряжение для болтов из стали Ст45.
По конструктивным соображениям принимаем диаметр стяжного болта Æ12.
Максимальная нагрузка на фундамент определиться по формуле:
5. Расчет привода.
Мощность , расходуемая на преодоление сил трения в подшипниках дебалансов валов, рассчитаем как:
где
— коэффициент трения в подшипниках.
Мощность , расходуется на преодоление сопротивления в вибрируемой бетонной смеси, опорах и конструктивных элементах, рассчитаем по формуле:
где — угол сдвига фаз, принимаем .
Дополнительные затраты мощности , расходуемые на преодоление сил трения в синхронизаторах, муфтах, карданных валах и др., определяем по формуле:
Суммарная мощность определяется:
Принимаем схему привода виброплощадки с одним синхронизатором и двумя виброблоками.
Рис. 3. Схема привода рассчитываемой виброплощадки:
1 – двигатель; 2 – синхронизатор; 3 – блок; 4 – вал карданный; 5 – дебаланс.
Определяем мощность электродвигателя с учетом коэффициента устойчивости работы привода ( ):
Выбираем двигатель
Крутящий момент , зубчатой передачи синхронизатора определим:
По крутящему
моменту и передаваемой мощности
подбираются синхронизаторы, карданные
валы.
6. Расчет устройства для крепления форм.
Усилие , крепления формы в процессе вибрирования бетонной смеси рассчитаем по формуле:
В качестве устройства для крепления формы обычно используют электромагниты, устанавливаемые на каждом виброблоке. Усилие одного электромагнита определяется:
Используем серийно выпускаемый магнит с усилием крепления .
Рис. 4. Виброгенератор:
1 – корпус; 2 – дебаланс; 3 – вал; 4 – роликоподшипник; 5 – дополнительный съемный груз; 6 – болт; 7 – выступ кольцевой; 8 – шайба; 9 – пробка.
Рис. 5. Блочная виброплощадка:
1 – виброблок; 2 – вал карданный; 3 – электродвигатель; 4 — синхронизатор; 5 – рамка; 6 – опорная рама; 7 – кожух звукоизолирующий.
ТЕХНИКА БЕЗОПАСНОСТИ И ОХРАНА ТРУДА.
Заводы сборного железобетона
относятся к числу предприятий,
на которых санитарно-
Вопросы обеспечения нормальных
гигиенических и санитарных норм,
а так же техника безопасности
закладываются при  В цехах, где используются
виброплощадки, должны быть приняты меры
по снижению шума, т.к. это оказывает отрицательное
воздействие на здоровье человека.
В цехах, где используются
виброплощадки, должны быть приняты меры
по снижению шума, т.к. это оказывает отрицательное
воздействие на здоровье человека.
При работе вибрационных машин шум характеризуется уровнем шумового давления в децибелах, а вибрация виброскоростью. Звуковое давление измеряется шумомером на расстоянии 1 метра от источника шума и 1,5 метра от пола:
Методы анализа вибрации фундамента машины
🕑 Время чтения: 1 минута
Фундамент машины подвергается динамическим нагрузкам. Эти нагрузки вызывают вибрационные движения, которые передаются в грунт под фундаментом. Воздействие этих вибраций на грунт анализируется с использованием принципов динамики грунта и теории колебаний.
Содержимое:
- Типы вибрации в основании машины
- Свободная вибрация в основании машины
- Вынужденная вибрация основания машины
- Анализ вибрации основания машины
- Масса (м)
- Жесткость (k)
- Лабораторный метод анализа вибрации
- Метод Баркана
- Испытание пластиной под нагрузкой
- Резонансное испытание
- Постоянная демпфирования (c)
Типы вибрации в основании машины
Существует два типа вибрации фундамента машины:
- Свободная вибрация
- Принудительная вибрация
Свободная вибрация в основании машины
Свободные колебания происходят без какой-либо внешней силы и возникают под действием сил в самой системе. Но для начала свободных колебаний сначала требуется внешняя сила или естественное возмущение. Свободные колебания могут быть двух типов:
Но для начала свободных колебаний сначала требуется внешняя сила или естественное возмущение. Свободные колебания могут быть двух типов:
- Затухание колебаний
- Незатухающие колебания
Вынужденная вибрация в основании машины
Вынужденные колебания возникают при постоянном воздействии внешних сил на фундамент машины. Допустим, на демпфированную систему действует возбуждающая сила F(t) . Уравнение движения можно записать в виде
Анализ вибрации фундамента машины Для анализа теории вибрации фундамента машины необходимо предположить, что фундамент машины имеет одну степень свободы. Обычно фундамент машины имеет 6 степеней свободы.
Скажем, фундамент машины опирается на грунтовую массу. Теперь масса машины и фундамента действует вниз вместе, и, скажем, m f который действует в центре тяжести системы. Масса грунта, выступающего вверх, равна, скажем, м с . упругое действие грунта из-за вибрации системы зависит от жесткости k . Сопротивление движению зависит от коэффициента демпфирования c .
Таким образом, эти три массы, жесткость и коэффициент демпфирования необходимы для завершения анализа фундамента машины. Определение вышеуказанных параметров поясняется ниже.
упругое действие грунта из-за вибрации системы зависит от жесткости k . Сопротивление движению зависит от коэффициента демпфирования c .
Таким образом, эти три массы, жесткость и коэффициент демпфирования необходимы для завершения анализа фундамента машины. Определение вышеуказанных параметров поясняется ниже.
Всякий раз, когда машина вибрирует, почва под фундаментом машины также вибрирует. Масса грунта, которая вибрирует из-за вибрации машины, называется синфазной массой грунта. Следовательно, полная масса ( м ) равна м = м ж + м с Где, м f = масса фундамента м с = масса грунта в фазе = меняется от 0 до м f Общая масса ( м ) варьируется от м f до 2м f .
Жесткость ( к ) Жесткость зависит от типа грунта под фундаментом, заделки фундаментного блока и распределения контактного давления между грунтом и фундаментом.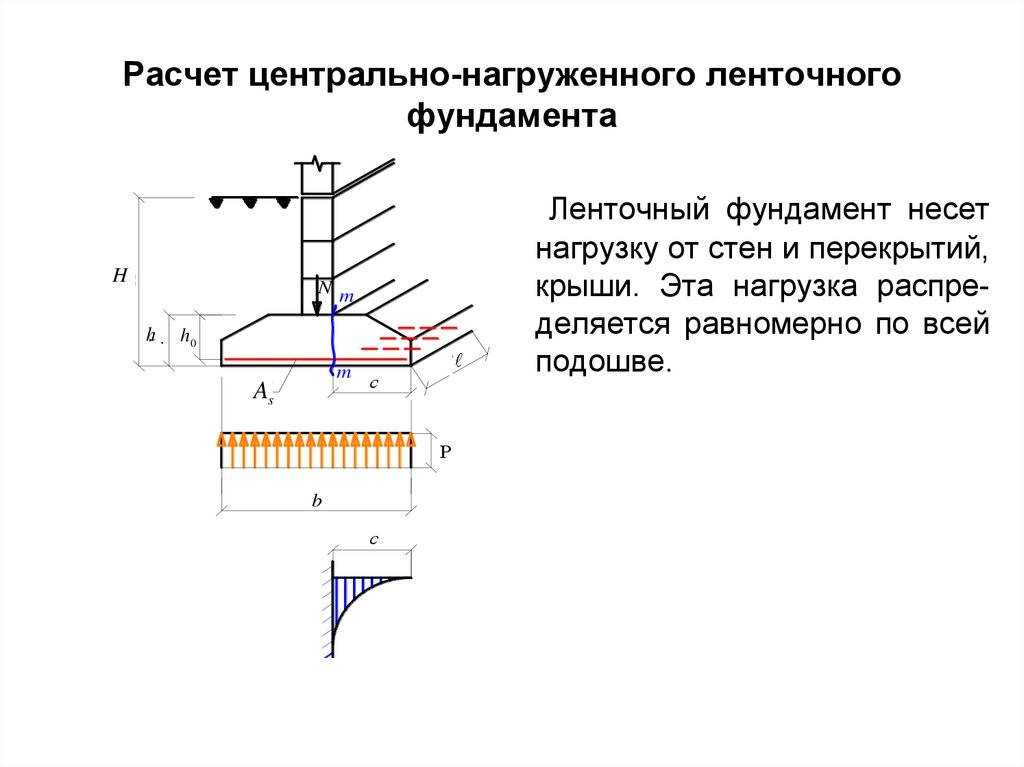 Жесткость достигается следующими методами.
Жесткость достигается следующими методами.
В лаборатории проводится трехосное испытание с вертикальными колебаниями и определяется модуль жесткости. Отсюда определяется модуль Юнга с помощью коэффициента Пуассона. Модуль Юнга Е = 2G(1+и) Жесткость k = AE/L Где E = модуль Юнга G = модуль жесткости U = соотношение позиций
Метод БарканаЖесткость также может быть получена из формулы, предложенной Барканом, которая приведена ниже. Где A = площадь контакта
Испытание пластиной под нагрузкойВ полевых условиях проводится испытание плитой под нагрузкой, при этом жесткость грунта определяется как наклон кривой нагрузки-деформации. Для связных грунтов, жесткость К Для несвязных грунтов, Жесткость k Где, B = ширина фундамента B p = диаметр пластины
Тест на резонанс Зная резонансную частоту ( f n ), мы можем рассчитать значение жесткости. f n можно определить, поместив вибратор массой m на стальную пластину, опирающуюся на землю. Следовательно, жесткость
f n можно определить, поместив вибратор массой m на стальную пластину, опирающуюся на землю. Следовательно, жесткость
Когда энергия вибрации рассеивается от почвы, происходит затухание. Основными причинами возникновения демпфирования являются потери на внутреннее трение из-за вязкостных эффектов и гистерезиса, радиационные потери из-за распространения волн через грунт. Постоянная демпфирования c получается из площади петли гистерезиса кривой деформации нагрузки следующим образом. Где, = потеря работы в гистерезисе Вт = общая проделанная работа. Константа затухания изменяется от 0,01 до 0,1. Подробнее: Типы фундаментов машин Общие требования к фундаментам машин
Методика проектирования фундаментов настольных вибрационных машин
Методика проектирования фундаментов настольных вибрационных машинРеклама
1 из 71
Верхняя защелка
Скачать для чтения офлайн
Машиностроение
Презентация Используется на семинаре Bentley CONNECTION 2016 в Сеуле
Рекламное объявление
Рекламное объявление
Процедура проектирования фундаментов для настольных вибрационных машин
- Kee H.
 Lee, P.E. ([email protected])
Департамент гражданского и архитектурного строительства
23 июня 2016 г.
Lee, P.E. ([email protected])
Департамент гражданского и архитектурного строительства
23 июня 2016 г. - 2 I. Обзор II. Основные понятия динамики III. Требования к дизайну IV. Предварительный размер V. Расчетные нагрузки VI. Импеданс (жесткость и демпфирование) VII. Динамический анализ с использованием STAAD Pro Содержание
- 3 I. Обзор
- 4 Обзор Фундамент настольного типа Приподнятая опора является обычным явлением для крупного оборудования с турбинным приводом, такого как электрические генераторы. Высота позволяет разместить воздуховоды, трубопроводы и вспомогательные элементы. располагаться под оборудованием. Структуры столешницы считаются гибкими, поэтому они реагируют на динамические нагрузки могут быть достаточно сложными и зависеть как от движения его отдельные элементы (колонны, балки и фундамент) и грунт, на котором это поддерживается.
- 5
Обзор
Процедура проектирования настольного фундамента
Вне резонансного диапазона?
0,8 фм < f < 1,2 фм
Модальный анализ
(собственное значение)
Да
Амплитуда (или скорость)
Лимит, ок?
Анализ истории времени
с гармоническими нагрузками
Да
Нет
Неуравновешенные силы и
Статические рабочие нагрузки
Нет
Настройте FDN.
 Геометрия
Предварительный
Размер фундамента
Допустимый подшипник
Емкость, хорошо?
Неглубокий фундамент
Детализация размера с эквалайзером. Данные
Свайный фундамент
Крышка сваиДизайн
Рассчитать контакт
Давление (qmax, qmin)
Да
Нет
75% от допустимого
несущая способность
Начало проверки стабильности
Конец проверки стабильности
Импеданс:
Жесткость и демпфирование
Начало вибрации
Динамический анализ
Расчетные нагрузки и
LC по ASCE 7
Статическая структурная
Анализ
Модальный ответ
Спектральный анализ
Размер члена
Требования к дизайну
согласно ASCE 7, ОК?
Да
Нет
Требования к дизайну
согласно ACI 318, хорошо?
Нет
Редизайн
Состав
Начало структурного
Анализ и дизайн
Конец вибрации
Динамический анализ
Да
Конец структурного
Анализ и дизайн
Геометрия
Предварительный
Размер фундамента
Допустимый подшипник
Емкость, хорошо?
Неглубокий фундамент
Детализация размера с эквалайзером. Данные
Свайный фундамент
Крышка сваиДизайн
Рассчитать контакт
Давление (qmax, qmin)
Да
Нет
75% от допустимого
несущая способность
Начало проверки стабильности
Конец проверки стабильности
Импеданс:
Жесткость и демпфирование
Начало вибрации
Динамический анализ
Расчетные нагрузки и
LC по ASCE 7
Статическая структурная
Анализ
Модальный ответ
Спектральный анализ
Размер члена
Требования к дизайну
согласно ASCE 7, ОК?
Да
Нет
Требования к дизайну
согласно ACI 318, хорошо?
Нет
Редизайн
Состав
Начало структурного
Анализ и дизайн
Конец вибрации
Динамический анализ
Да
Конец структурного
Анализ и дизайн - 6
Кодексы и стандарты
1. ASCE 7-10, Американское общество инженеров-строителей, «Минимальные расчетные нагрузки для зданий».
и другие конструкции».
2. ACI 318M-14, Американский институт бетона, «Требования строительных норм и правил к структурным
Конкрет и комментарий».
 3. ACI 351.3R-04, Отчет «Основы динамического оборудования».
4. PIP STC01015, Критерии структурного проектирования
Ссылка
1. С. Арья, М. О’Нил и Г. Пинкус, «Проектирование конструкций и фундаментов для вибрационных
Machines», издательство Gulf Publishing Company, Хьюстон, Техас, 19 мая.81.
Обзор
3. ACI 351.3R-04, Отчет «Основы динамического оборудования».
4. PIP STC01015, Критерии структурного проектирования
Ссылка
1. С. Арья, М. О’Нил и Г. Пинкус, «Проектирование конструкций и фундаментов для вибрационных
Machines», издательство Gulf Publishing Company, Хьюстон, Техас, 19 мая.81.
Обзор - 7 II. Основная информация о динамическом анализе
- 8 Статический структурный анализ: Может гарантировать, что конструкция выдержит стационарные условия нагрузки, но может недостаточно, особенно если нагрузка меняется со временем. Динамический структурный анализ: Используется для определения поведения конструкций, подвергающихся нагрузкам, изменяющимся со временем. Инерция и, возможно, демпфирование конструкции играют важную роль. К динамике относится также изучение свободных колебаний, т. е. колебаний конструкции после устранения силы, вызывающей движение. Основная информация о динамическом анализе
- 9 Ф М В к Ф Fxk sta STAS XKF Ф(т) М(т) В (т) Инерция силы )(tFxkxcxm dyndyndyn Состояние статической нагрузки Условия динамической загрузки Основная информация о динамическом анализе
- 10
Модальный анализ:
Модальный анализ используется для определения
собственные частоты и мода конструкции
формы.
 Позволяет конструкции избежать резонансных
вибрации или вибрировать с определенной
частота.
Основная информация о динамическом анализе
Позволяет конструкции избежать резонансных
вибрации или вибрировать с определенной
частота.
Основная информация о динамическом анализе - 11 Основная информация о динамическом анализе Фундаментальный и два высших поступательных режима колебаний в направлении X Две поступательные и одна вращательная формы мод Основные режимы колебаний источник изображения: http://www.iitk.ac.in/nicee/IITK-GSDMA/EBB_001_30May2013.pdf
- 12 Анализ спектра отклика: Анализ спектра отклика можно использовать для определения того, как конструкция реагирует на землетрясения. Основная информация о динамическом анализе
- 13 Основная информация о динамическом анализе Эквивалентные структуры SDOF, соответствующие каждому режиму колебаний здания источник изображения: http://www.iitk.ac.in/nicee/IITK-GSDMA/EBB_001_30May2013.pdf
- 14 Искусственное ускорение истории времени в соответствии со спектром кода (Амр С. Эльнашай, Основы сейсмостойкого проектирования) Основная информация о динамическом анализе
- 15
Анализ истории времени отклика:
Анализ истории времени отклика можно использовать для расчета отклика конструкции.
 к изменяющимся во времени нагрузкам.
Этот анализ выполняется с использованием метода модальной суперпозиции, используемого в
СТААД.
Фундамент машин определяется как конструкция, подвергающаяся гармоническим нагрузкам,
поэтому анализ проводится с приложением неуравновешивающих сил для проверки
производительность вибрации.
Основная информация о динамическом анализе
к изменяющимся во времени нагрузкам.
Этот анализ выполняется с использованием метода модальной суперпозиции, используемого в
СТААД.
Фундамент машин определяется как конструкция, подвергающаяся гармоническим нагрузкам,
поэтому анализ проводится с приложением неуравновешивающих сил для проверки
производительность вибрации.
Основная информация о динамическом анализе - 16 Основная информация о динамическом анализе Вывод упругих спектров (Амр С. Эльнашай, Основы инженерии землетрясений)
- 17 III. Требования к дизайну
- 18
Описание требований
1 Коды и стандарт ACI 351.3R
2 Отношение частот 0,8 < 𝑓𝑜/ 𝑓𝑛 < 1,2 (согласно ACI 351.3R)
3 Изоляция
Фундамент, который необходимо спроектировать с помощью детального динамического анализа, должен быть
изолированы от примыкающего фундамента и/или сооружения.
4
Положения об освобождении
из динамического анализа
Центробежный:
Менее 500 л.с. (375 кВт) и трехкратный общий вес машины
(в 2,5 раза для свайного фундамента по ACI 351.
 3R)
Поршневой:
Менее 200 л.с. (150 кВт) и 5-кратный общий вес машины
(4 раза для свайного фундамента по ACI 351.3R)
5
Критерии вибрации
— Скорость вибрации
Центробежный: 0,12 дюйма/сек (3,0 мм/сек)
Возвратно-поступательное движение: 0,15 дюйма/сек (3,8 мм/сек) (согласно PIP STC01015)
7 Допустимая несущая способность
Максимальное давление грунта и/или реакция сваи из-за сочетания статической и динамической нагрузки
ns не должна превышать 75% допустимой грунтовой и/или несущей способности. (согласно PIP STC01015)
8 Допустимая осадка
равномерная осадка: 1 дюйм (25 мм)
дифференциальная осадка: 3/4 дюйма (20 мм)
Требования к дизайну
Критерии проектирования фундаментов вибрационного оборудования
3R)
Поршневой:
Менее 200 л.с. (150 кВт) и 5-кратный общий вес машины
(4 раза для свайного фундамента по ACI 351.3R)
5
Критерии вибрации
— Скорость вибрации
Центробежный: 0,12 дюйма/сек (3,0 мм/сек)
Возвратно-поступательное движение: 0,15 дюйма/сек (3,8 мм/сек) (согласно PIP STC01015)
7 Допустимая несущая способность
Максимальное давление грунта и/или реакция сваи из-за сочетания статической и динамической нагрузки
ns не должна превышать 75% допустимой грунтовой и/или несущей способности. (согласно PIP STC01015)
8 Допустимая осадка
равномерная осадка: 1 дюйм (25 мм)
дифференциальная осадка: 3/4 дюйма (20 мм)
Требования к дизайну
Критерии проектирования фундаментов вибрационного оборудования - 19 Требования к дизайну Резонансный диапазон: 0,7 fe < fs < 1,3 fe fe : Частота динамической силы (рабочая скорость машины) fs : Частота поддерживающей системы (оборудование + фундамент) Соотношение масс развязки: me/ms я : Масса вибрационной машины мс : Масса основания ☞ Игнорировать взаимодействие, если условие выполнено
- 20 Критерии вибрации для вращающихся машин Общие пределы чувствительности персонала (Взаимосвязь между амплитудой смещения и частотой вибрации) Требования к дизайну
- 21
Горизонтальная пиковая скорость
(дюйм/сек)
Работа машины <0,005
0,005-0,010
0,010-0,020
0,020-0,040
0,040-0,080
Чрезвычайно гладкий
Очень гладкий
Гладкий
Очень хороший
Хороший
0,080-0,160
0,160-0,315
0,315-0,630
>0,630
Справедливый
Слегка грубый
Грубый
Очень грубо
Критерии приемлемости вибрации вращающегося оборудования
Р.
 Л. Бакстер и Д. Л. Бернхард, «Допуски вибрации для промышленности»,
Документ ASME 67-PEM-14, Проектирование и техническое обслуживание установок
Конференция, Детройт, Мичиган, апрель 1967 г.
Требования к дизайну
Таблица серьезности вибрации машин общего назначения
(Бакстер и Бернхард 1967).
Л. Бакстер и Д. Л. Бернхард, «Допуски вибрации для промышленности»,
Документ ASME 67-PEM-14, Проектирование и техническое обслуживание установок
Конференция, Детройт, Мичиган, апрель 1967 г.
Требования к дизайну
Таблица серьезности вибрации машин общего назначения
(Бакстер и Бернхард 1967). - 22
№ Требования к сейсмостойкости Замечание по применению (для случая: категория сейсмостойкости B)
1 Влияние вертикальной сейсмической нагрузки Н/Д SDS меньше 0,125
2 Ортогональное сочетание горизонтальных сейсмических нагрузок Н/Д Не требуется для расчетной категории сейсмостойкости B
3 Горизонтальные структурные неровности Н/Д Нет неровностей
4 Вертикальные структурные неровности N/A Нет Неровности
5 Гибкость диафрагмы Н/Д Жесткая диафрагма
6 Применение торсионных эффектов автоматически включается в структурный расчет
7 Усиление случайного крутящего момента Н/Д Не требуется для сейсмостойкости категории B
8 Сдвиг этажа Н/Д Не требуется для сейсмостойкости категории B
9Применение эффектов P-дельта проверено в соответствии с разд.
 12.8.7, ASCE 7-10
Требования к сейсмическому проектированию (главы 12 и 15, ASCE 7-10)
Требования к дизайну
12.8.7, ASCE 7-10
Требования к сейсмическому проектированию (главы 12 и 15, ASCE 7-10)
Требования к дизайну - 23 Сейсмические коэффициенты для нестроительной конструкции, аналогичной зданию (таблица 15.4-2, ASCE 7-10) Коэффициент модификации отклика (R): 3,0 для обычной железобетонной несущей конструкции. Коэффициент сверхпрочности (Ω0): 3,0 для несущей конструкции из обычного железобетона (не используется в расчетах) Коэффициент усиления прогиба (Cd): 2,5 для обычной железобетонной несущей конструкции. Коэффициент избыточности (ρ): 1,0 для конструкции категории B по сейсмостойкости. Для более удобного проектирования с помощью программы STAAD для структурный анализ. Необходимо рассчитать базовый сдвиг на основе ELF (и T = Ta Cu), чтобы проверить, менее 85% базового сдвига ELF. Требования к дизайну
- 24
Кривая неупругой силы-деформации
первоисточник:
Краткое руководство по сейсмическим расчетным факторам
Требования к дизайну
Умножьте спектральные ускорения на модальные
коэффициент участия и по (I/R)
Для определения дрейфа умножьте результаты
модальный анализ (включая масштабирование I/R, но не
85% масштабирование) по Cd/I.
 Разрешается пренебрегать для сейсмического проектирования.
Структура категории B, не имеющая горизонтальных
тип неровности 1a или 1b таблицы 12.3-1, ASCE 7-10.
Разрешается пренебрегать для сейсмического проектирования.
Структура категории B, не имеющая горизонтальных
тип неровности 1a или 1b таблицы 12.3-1, ASCE 7-10. - 25 Основная стратегия проектирования землетрясений: Рассчитайте максимальные силы упругости и уменьшите их на коэффициент, чтобы получить расчетные силы. Требования к дизайну Специальный усиленный Бетонные рамки Момент
- 26 IV. Предварительный размер
- 27 Предварительный выбор размеров элементов и геометрическое расположение являются начальным этапом проектирования структурная система. Поставщик предоставит предварительный габаритный чертеж фундамента, который можно использовать на начальном этапе. этапы проектирования. Палубная система/балки Глубина балки должна примерно в 0,2 раза превышать ширину в свету или 600 мм (2 фута), в зависимости от того, что больше. Балки не должны прогибаться более чем на 0,5 мм (0,02 дюйма) при воздействии статических нагрузок. Предварительный размер
- 28
Столбцы
Расположите колонны на пересечении балок, где они будут примерно одинаково нагружены.
 при статических вертикальных нагрузках.
Размеры колонны не должны быть меньше одной восьмой длины безопорной колонны.
длина и не должна быть меньше 0,14 м2 (1,5 фута2).
Центр жесткости колонн группы колонн должен совпадать с точкой динамического
приложения нагрузки, а также должен быть совместим (эксцентриситет менее 5%) с центром
масса оборудования, включая верхнюю половину несущей массы.
Предварительный размер
при статических вертикальных нагрузках.
Размеры колонны не должны быть меньше одной восьмой длины безопорной колонны.
длина и не должна быть меньше 0,14 м2 (1,5 фута2).
Центр жесткости колонн группы колонн должен совпадать с точкой динамического
приложения нагрузки, а также должен быть совместим (эксцентриситет менее 5%) с центром
масса оборудования, включая верхнюю половину несущей массы.
Предварительный размер - 29 Предварительный размер Мат Минимальная толщина мата не должна быть меньше следующей. tmin = 0,6 + L/30 (м) ≥ 750 мм (2,5 фута), где L — длина фундамента. Вес матового фундамента с добавлением грунта должен быть как минимум равен весу палубы плюс вибрационное оборудование. Следующая эмпирическая формула, предложенная целевым комитетом ASCE (см. 9.10), может также может использоваться для расчета минимальной толщины t фундамента из матового грунта: tmin = 0,07 L4/3 (фут), где L — среднее значение двух соседних пролетов между колоннами, выраженное ног.
- 30
V.
 Расчетные нагрузки
Расчетные нагрузки - 31 Тип нагрузки Расчетные нагрузки Проверить данные V/P Примечание Статический Приложенная статическая нагрузка Требуется Требуемые действующие нагрузки персонал, инструменты, ремонтное оборудование и материалы Приложенные ветровые нагрузки, если таковые имеются рассчитываются в проекте конструкции (не управляющий) Применяемые сейсмические нагрузки, если они должны быть рассчитаны в проекте конструкции Приложенные статические рабочие нагрузки Требуемые при нормальной работе (не изменяющиеся во времени нагрузки от машины) Специальные нагрузки для FDN надземного типа Н/Д Н/Д Монтажные и эксплуатационные нагрузки Применяются, если какая-либо временная нагрузка Применяемые тепловые нагрузки, если они не являются определяющими (за исключением условий с ограничениями) Динамический Динамические нагрузки из-за неуравновешенных масс Применяется Требуемая рабочая скорость, точка нагрузки, разность фаз Расчетные нагрузки для фундамента машин (согласно ACI 351.3R) Расчетные нагрузки
- 32
Расчетные нагрузки
Динамические нагрузки из-за неуравновешенных масс обычно отражаются синусоидально изменяющимися нагрузками.
 нагрузки в ЦТ в расчетной модели, включая жесткие звенья и сосредоточенную массу, прикрепленную к
точка динамической загрузки. Если к анкерным точкам применяются динамические нагрузки, эти нагрузки должны включать
дополнительные связанные силы.
нагрузки в ЦТ в расчетной модели, включая жесткие звенья и сосредоточенную массу, прикрепленную к
точка динамической загрузки. Если к анкерным точкам применяются динамические нагрузки, эти нагрузки должны включать
дополнительные связанные силы. - 33 Эффективный эксцентриситет Расчетные нагрузки Оценки качества баланса для выбранных групп представителей жесткие роторы взяты из ANSI/ASA S2.19)
- 34 Расчетные нагрузки Нормальный крутящий момент (иногда называемый приводным крутящим моментом) обычно прикладывается к фундаменту в виде статической силы. пара в вертикальном направлении в точках крепления
- 35 Статические нагрузки (не изменяющиеся во времени) Собственный вес оборудования Случай 1: Все нагрузки приложены к ЦТ. (Центр гравитации). Случай 2: Все нагрузки приложены к анкерным точкам. Случай 2 Сам /2 Сам /2 Себя Дело 1 Расчетные нагрузки
- 36
Статические нагрузки (не изменяющиеся во времени)
Статические рабочие нагрузки: дополнительный вес
Случай 2
Вопер
Вопер /2 Вопер /2
Случай 1: Все нагрузки приложены к ЦТ.
 (Центр гравитации).
Случай 2: Все нагрузки приложены к анкерным точкам.
Дело 1
Расчетные нагрузки
(Центр гравитации).
Случай 2: Все нагрузки приложены к анкерным точкам.
Дело 1
Расчетные нагрузки - 37 Т л Статические нагрузки Статические рабочие нагрузки: крутящий момент Случай 1: Все нагрузки приложены к ЦТ. (Центр гравитации). Случай 2: Все нагрузки приложены к анкерным точкам. л т/л т/л Случай 1 Случай 2 ч ч где NT = нормальный крутящий момент, Н·м Ps = мощность, передаваемая валом при подключении, киловатт f0 = рабочая скорость машины, об/мин НТ = (9550)(пс) f0 Н∙м Расчетные нагрузки
- 38 л Динамические нагрузки л Дело 1 ч ч Ф(т) Валюта (т) финансовый год (т) Валюта (т) финансовый год (т) М(т) М (т) = FX (т) × ч Случай 1-1 Случай 1: Все нагрузки приложены к ЦТ. (Центр гравитации). Случай 1-1: Все нагрузки приложены к центральной точке между двумя анкерами Случай 2: Все нагрузки приложены к анкерным точкам. Расчетные нагрузки
- 39
л
Динамические нагрузки Случай 1: Все нагрузки приложены к ЦТ. (Центр гравитации).
Случай 1-1: Все нагрузки приложены к центральной точке между двумя анкерами
Случай 2: Все нагрузки приложены к анкерным точкам.
 л
Случай 2
ч ч
FX(т) /2
FY(т) /2
FX(т) /2
FY(т) /2
FX(t)×h/л FX(t)×h/л
+
Расчетные нагрузки
л
Случай 2
ч ч
FX(т) /2
FY(т) /2
FX(т) /2
FY(т) /2
FX(t)×h/л FX(t)×h/л
+
Расчетные нагрузки - 40 Пример расчета динамической нагрузки (центробежная) Расчетные нагрузки
- 41 Расчетные нагрузки Поскольку движение повторяется через равные промежутки времени, его называют периодическое движение. Кроме того, движение, описываемое в терминах круговые функции, синус и косинус, известны как гармоническое движение. (Все гармоническое движение является периодическим, но не всякое периодическое движение является гармоническим.) Параметр p называется (собственной) круговой частотой, E называется амплитуда, а α известен как фазовый угол. Как показано на рисунке выше τ обозначает период движения, т. е. время, затрачиваемое на один полный цикл движения. Разделив его на м, Незатухающие свободные колебания (вертикальное движение системы масса-пружина) Гармоническая нагрузка для временного анализа (Ввод СТААД)
- 42 Тип Приложенная нагрузка Точка загрузки вращающийся масса Сила Операционная Скорость (фо) Примечание Масса Fcomp = 40 000 кгс COG компрессора Fbase = 18 500 кгс Расположение анкеров Опорная плита Динамическая неуравновешенная сила ЦТ компрессора 193,68 кг 950 кгс 3055 об/мин 1900 кгс Расчетные нагрузки, создаваемые компрессором Редукторный двигатель компрессора Пример данных V/P (центробежный тип): Расчетные нагрузки, создаваемые компрессором
- 43
1.
 COG двигателя должен быть предоставлен для расчета сейсмической нагрузки.
2. Разность фаз между динамическими силами в трех направлениях должна быть
сообщается для расчета правильной реакции фундамента.
Тип Приложенная нагрузка Точка загрузки Вращающаяся масса
Операционная
Скорость (фо)
Фаза Примечание
Вес FMotor = 284,4 кН Центр тяжести двигателя 47,4×6=284,4
Динамический
Fv_left = 87,0 кН Расположение анкеров 1800 об/мин Требуется Является ли это неуравновешенной силой?
Fv_right = 87,0 кН Расположение анкеров 1800 об/мин Требуется Является ли это неуравновешенной силой?
Fh = 11,0 кН Расположение анкеров 1800 об/мин Требуется Является ли это неуравновешенной силой?
Faxis = 2,2 кН Расположение анкеров 1800 об/мин Требуется Является ли это неуравновешенной силой?
Короткий
Схема
(Макс.)
Fv = 201,4 кН Расположение анкеров Требуется Требуется Случай случайной нагрузки
Fh = 82,5 кН Расположение анкеров Требуемые Требуемые То же, что и выше
Факсис = 2,2 кН Расположение анкеров Требуемые Требуемые То же, что и выше
Пример данных V/P (центробежный тип): Расчетные нагрузки, создаваемые двигателем
COG двигателя должен быть предоставлен для расчета сейсмической нагрузки.
2. Разность фаз между динамическими силами в трех направлениях должна быть
сообщается для расчета правильной реакции фундамента.
Тип Приложенная нагрузка Точка загрузки Вращающаяся масса
Операционная
Скорость (фо)
Фаза Примечание
Вес FMotor = 284,4 кН Центр тяжести двигателя 47,4×6=284,4
Динамический
Fv_left = 87,0 кН Расположение анкеров 1800 об/мин Требуется Является ли это неуравновешенной силой?
Fv_right = 87,0 кН Расположение анкеров 1800 об/мин Требуется Является ли это неуравновешенной силой?
Fh = 11,0 кН Расположение анкеров 1800 об/мин Требуется Является ли это неуравновешенной силой?
Faxis = 2,2 кН Расположение анкеров 1800 об/мин Требуется Является ли это неуравновешенной силой?
Короткий
Схема
(Макс.)
Fv = 201,4 кН Расположение анкеров Требуется Требуется Случай случайной нагрузки
Fh = 82,5 кН Расположение анкеров Требуемые Требуемые То же, что и выше
Факсис = 2,2 кН Расположение анкеров Требуемые Требуемые То же, что и выше
Пример данных V/P (центробежный тип): Расчетные нагрузки, создаваемые двигателем - 4444
Пример данных V/P (центробежный тип): Расчетные нагрузки, создаваемые зубчатым колесом
ФГС
несбалансированный
Сила 2
несбалансированный
Сила 2
Ц.
 О.Г. места должны быть указаны на чертеже
для приложения неуравновешенных сил из-за шестерни и кулисы.
Тип Приложенная нагрузка Точка загрузки
вращающийся
масса
Операционная
Скорость (фо)
Эксцентриситет Примечание
Вес FG = 52 307 Н COG шестерни (всего)
Статический
Операционная
Mges =127 605 Н·м COG шестерни (всего)
Ff = 141 867 Н. Анкеры (бычье зубчатое колесо)
FGS = 2 294 Н COG шестерни (всего)
Fs = 87 266 Н Анкера (шестерня)
Короткое замыкание
(Макс.)
Mges =127 605 Н·м Центр тяжести зубчатого колеса (всего) Случайная нагрузка
Ff = 141 867 Н. Анкеры (шестерня) То же, что и выше.
ФГС = 2,294 N COG шестерни (всего) То же, что и выше
Fs = 87 266 Н Анкера (шестерня) То же, что и выше
Динамический
Неуравновешенная сила 1 Центр тяжести Bull Gear 1775 кг 1780 об/мин e=6,35/f0 мм Оценка согласно ACI 351.3R
Неуравновешенная сила 2 Центр тяжести шестерни 718 кг 3039 об/мин e=6,35/f0 мм Расчетно по ACI 351.3R
О.Г. места должны быть указаны на чертеже
для приложения неуравновешенных сил из-за шестерни и кулисы.
Тип Приложенная нагрузка Точка загрузки
вращающийся
масса
Операционная
Скорость (фо)
Эксцентриситет Примечание
Вес FG = 52 307 Н COG шестерни (всего)
Статический
Операционная
Mges =127 605 Н·м COG шестерни (всего)
Ff = 141 867 Н. Анкеры (бычье зубчатое колесо)
FGS = 2 294 Н COG шестерни (всего)
Fs = 87 266 Н Анкера (шестерня)
Короткое замыкание
(Макс.)
Mges =127 605 Н·м Центр тяжести зубчатого колеса (всего) Случайная нагрузка
Ff = 141 867 Н. Анкеры (шестерня) То же, что и выше.
ФГС = 2,294 N COG шестерни (всего) То же, что и выше
Fs = 87 266 Н Анкера (шестерня) То же, что и выше
Динамический
Неуравновешенная сила 1 Центр тяжести Bull Gear 1775 кг 1780 об/мин e=6,35/f0 мм Оценка согласно ACI 351.3R
Неуравновешенная сила 2 Центр тяжести шестерни 718 кг 3039 об/мин e=6,35/f0 мм Расчетно по ACI 351.3R - 4545
Пример данных V/P (центробежный тип)
Тип движения оборудования
Операционная
Скорость (fo, об/мин)
Власть
Передаваемый (кВт)
Направление вращения
Двигатель Вращение 1800 15000 против часовой стрелки
Механизм
Bull Gear Вращение 1 780 15 000 против часовой стрелки
Шестерня вращающаяся 303915000 по часовой стрелке
Компрессор Вращение 3 055 11 300 по часовой стрелке
Оборудование
Динамические нагрузки данных о весе
Вес
Оборудование (кН)
Вес
Техническое обслуживание (кН)
Вес
Вращающаяся часть (кН)
Макс.
 несбалансированный
Сила (кН)
Операционная
Скорость (fo, об/мин)
Угол фазы
(градус)
Пункт погрузки
Мотор
47.40
Вер. ± 87,00
1800
0,0
Каждый ЯкорьХор. ± 11,00 90,0
284,40= 47,40 (6 шт.) Осевое ± 2,20 0,0
Механизм
Bull Gear 52,31 17,41 ± 4,06 1780 0,0 COGbg
Шестерня — 7,04 ± 3,66 3,039 0,0 COGpn
Компрессор 392,40 120,66 18,64 ± 9,32 3 055 0,0 COGcomp
Базовая плита 181,49Н/Д
Консоль уплотнения сухого газа 15,70 Н/Д
Лист V/P, применяемый в расчетном документе
несбалансированный
Сила (кН)
Операционная
Скорость (fo, об/мин)
Угол фазы
(градус)
Пункт погрузки
Мотор
47.40
Вер. ± 87,00
1800
0,0
Каждый ЯкорьХор. ± 11,00 90,0
284,40= 47,40 (6 шт.) Осевое ± 2,20 0,0
Механизм
Bull Gear 52,31 17,41 ± 4,06 1780 0,0 COGbg
Шестерня — 7,04 ± 3,66 3,039 0,0 COGpn
Компрессор 392,40 120,66 18,64 ± 9,32 3 055 0,0 COGcomp
Базовая плита 181,49Н/Д
Консоль уплотнения сухого газа 15,70 Н/Д
Лист V/P, применяемый в расчетном документе - 4646
Пример данных V/P (центробежный тип)
Оборудование
Статическая рабочая нагрузка (номинальная) Нагрузка от короткого замыкания (макс.)
Точка нагруженияFвсасывания Fout Крутящий момент Вертикальный левый Вертикальный правый Горизонтальный Осевой
(кН)
Двигатель — — — 201,40 -201,40 82,50 2,20 Каждый анкер
Шестерня — — — 0,83 -0,77 — — Каждый анкер
Компрессор — — — — — — —
Крутящий момент короткого замыкания (SCT)
Момент короткого замыкания двигателя, если он указан производителем машины, следует учитывать в
структурный дизайн.
 Крутящий момент, который не является нормальным явлением, представляет собой очень кратковременную нагрузку и возникает как
в результате неисправности в электрической цепи машин. Крутящий момент короткого замыкания не должен комбинироваться
с ветром или землетрясением. ACI 351.3R сек. 3.2.1.5
Лист V/P, применяемый в расчетном документе
Крутящий момент, который не является нормальным явлением, представляет собой очень кратковременную нагрузку и возникает как
в результате неисправности в электрической цепи машин. Крутящий момент короткого замыкания не должен комбинироваться
с ветром или землетрясением. ACI 351.3R сек. 3.2.1.5
Лист V/P, применяемый в расчетном документе - 47 Пример данных V/P (возвратно-поступательный тип)
- 48 Пример данных V/P (возвратно-поступательный тип)
- 49
Пример данных V/P (возвратно-поступательный тип)
Движение оборудования
Рабочая скорость
(фо, об/мин)
Власть
Передаваемый (кВт)
Направление вращения
Двигатель Вращение 356 1609 по часовой стрелке
Компрессор Поршневой См. результат См. результат вверх-вниз
Оборудование
Динамические нагрузки
Макс. несбалансированный
Сила (фунт-сила) и момент (фунт-фут)
Операционная
Скорость (fo, об/мин)
Фазовый угол (градусы) Точка загрузки
Мотор
Вертикальный ± 346
356
0
COGmtГоризонтальный ± 346 90
Осевой 0
Компрессор
Результирующий
Сила (Fv)
1-й Орд.
 ± 5273 356 0
COGcomp
2-й Орд. ± 2755 712 0
Результирующий
Момент (Мч)
1-й Орд. ± 93569 356 135
2-й Орд. ± 0 0 0
Результирующий
Момент (Мв)
1-й Орд. ± 257575 356 45,9
2-й Орд. ± 93233 712 180
Лист V/P, применяемый в расчетном документе
± 5273 356 0
COGcomp
2-й Орд. ± 2755 712 0
Результирующий
Момент (Мч)
1-й Орд. ± 93569 356 135
2-й Орд. ± 0 0 0
Результирующий
Момент (Мв)
1-й Орд. ± 257575 356 45,9
2-й Орд. ± 93233 712 180
Лист V/P, применяемый в расчетном документе - 50 Расчет динамической нагрузки (возвратно-поступательное движение) Пример данных V/P (возвратно-поступательный тип)
- 51 VI. Импеданс (жесткость и демпфирование)
- 52 Импеданс (жесткость и демпфирование)
- 53 Импеданс (жесткость и демпфирование) Процедура расчета для определения импеданса, обеспечиваемого вспомогательной средой 1. Рассчитайте начальный импеданс 2. Включите демпфирование материала в начальный импеданс. 3. Добавьте эффекты внедрения к скорректированному импедансу 4. Уменьшите коэффициент демпфирования (20%, 50% и 12% для горизонтальных, вертикальных и крутильных движений). 5. Рассчитайте амплитуды (или выполните анализ, чтобы найти амплитуды)
- 54 Импеданс (жесткость и демпфирование)
- 55
Импеданс (жесткость и демпфирование)
Комплексный импеданс домена легче описать математически, и он применяется в моделях импеданса.
 Велетсос и другие (Велетсос и Наир 1974; Велецос и Вербич 1973; Велетсос и Вей, 1971).
Связь между моделями импеданса и моделями демпфированной жесткости
(ki и ci рассчитываются в предположении идеальной упругости, а ci включает только геометрическое демпфирование).
Горизонтальный импеданс
Сопротивление качания
Вертикальный импеданс
Торсионное сопротивление
Начальный импеданс
Велетсос и другие (Велетсос и Наир 1974; Велецос и Вербич 1973; Велетсос и Вей, 1971).
Связь между моделями импеданса и моделями демпфированной жесткости
(ki и ci рассчитываются в предположении идеальной упругости, а ci включает только геометрическое демпфирование).
Горизонтальный импеданс
Сопротивление качания
Вертикальный импеданс
Торсионное сопротивление
Начальный импеданс - 56 Импеданс (жесткость и демпфирование) Демпфирование материала Приближенный подход, часто используемый для учета демпфирования материала, умножает комплексный импеданс, оценивается без учета демпфирования материала комплексным коэффициентом (1+ i2βm) для определения скорректированного комплексное сопротивление Где βm = коэффициент демпфирования материала грунта и другие термины определены ранее.
- 57
Импеданс (жесткость и демпфирование)
Эффекты внедрения
Встраивание увеличивает как жесткость, так и демпфирование, но увеличение демпфирования является более значительным.
Отсутствие всестороннего давления на поверхности часто приводит к отрыву грунта от основания и
создание зазора, как показано на рис.
 4.5
Чтобы найти приблизительную поправку на этот эффект, инженер
следует учитывать эффективную глубину анкеровки меньше, чем
истинное вложение.
4.5
Чтобы найти приблизительную поправку на этот эффект, инженер
следует учитывать эффективную глубину анкеровки меньше, чем
истинное вложение. - 58 Импеданс (жесткость и демпфирование) Эффекты внедрения Горизонтальный импеданс Сопротивление качания Вертикальный импеданс Торсионное сопротивление
- 59
Импеданс (жесткость и демпфирование)
Корректировка теоретических значений
Значения демпфирования для больших фундаментов, подвергающихся малым амплитудам вибрации, обычно меньше, чем
аналитически предсказанные значения (EPRI 1980; Novak 1970).
EPRI 1980 рекомендует, чтобы коэффициент демпфирования грунта для использования при проектировании фундаментов вентиляторов электростанций не
превышать 20 % для горизонтального движения, 50 % для вертикального движения, 10 % для поперечного качательного движения и 15 % для осевого движения.
и крутильные движения.
Немецкий DIN 4024 рекомендует, чтобы коэффициенты демпфирования грунта, используемые при анализе вибрации жестких блочных фундаментов,
не должен превышать 25%.
 Новак (1970) рекомендует уменьшать аналитически определенные геометрические коэффициенты демпфирования (с упругой полу-
космические модели) на 50% для динамического расчета фундамента.
Новак (1970) рекомендует уменьшать аналитически определенные геометрические коэффициенты демпфирования (с упругой полу-
космические модели) на 50% для динамического расчета фундамента. - 60 Импеданс (жесткость и демпфирование) Расчет амплитуды
- 61 VII. Динамический анализ с помощью STAAD.Pro
- 62
Динамический анализ с помощью STAAD.Pro
Массовое моделирование
Даже если известно, что нагрузка действует только в одном направлении, обычно движение массы происходит в другом направлении.
направления в некоторых или всех суставах и направления этих масс (приложенные как нагрузки, в единицах веса)
необходимо ввести, чтобы быть правильным.
Массы следует вводить в глобальных направлениях с одинаковым знаком, насколько это возможно, чтобы
представительные массы не компенсируют друг друга.
STAAD использует диагональную матрицу масс, состоящую из шести уравнений сосредоточенной массы на соединение. собственный вес или
Равномерно нагруженный элемент распределен на 50 % на каждое торцевое соединение без массы вращения
моменты инерции.
 Остальные типы элементов интегрированы, но, грубо говоря,
вес распределяется поровну между соединениями элемента.
Остальные типы элементов интегрированы, но, грубо говоря,
вес распределяется поровну между соединениями элемента. - 63 Динамический анализ с помощью STAAD.Pro Моделирование демпфирования Композитное модальное демпфирование позволяет вычисление затухания моды от разные коэффициенты демпфирования для разных материалы (сталь, бетон, грунт). Режимы которые деформируют в основном сталь коэффициент демпфирования стали, тогда как режимы, в основном деформируют почву, Коэффициент увлажнения почвы. Композитное модальное демпфирование основано на средневзвешенном значении деформации энергии в каждом материале.
- 64
Для более удобного оформления с помощью программы STAAD «модальный
анализ спектра отклика» выбран для структурного анализа.
Базовый сдвиг на основе ELF (и T = Ta Cu) должен быть рассчитан
чтобы проверить, составляет ли вычисленный модальный анализ менее 85% от
базовые ножницы ELF.
Умножить спектральные ускорения на модальный коэффициент участия и на
(И/Р)
Динамический анализ с использованием STAAD.
