Напряжения. Перемещения и деформации.
Как отмечалось выше, внутренние силы, действующие в некотором сечении со стороны отброшенной части тела, можно привести к главному вектору и главному моменту. Зафиксируем точку М в рассматриваемом сечении с единичным вектором нормали n. В окрестности этой точки выделим малую площадку F. Главный вектор внутренних сил, действующих на этой площадке, обозначим через P (рис. 1 а). При уменьшении размеров площадки соответственно
Рис.1. Композиция вектора напряжения. а) вектор полного напряжения б) вектор нормального и касательного напряжений
уменьшаются главный вектор и главный момент внутренних сил, причем главный момент уменьшается в большей степени. В пределе при получим
Аналогичный предел
для главного момента равен нулю.
В общем случае направление вектора напряжений рn не совпадает с направлением вектора нормали п. Проекция вектора рn на направление вектора п называется нормальным напряжением , а проекция на плоскость, проходящую через точку М и ортогональную вектору n, — касательным напряжением (рис. 1 б).
Размерность напряжений
равна отношению размерности силы к
размерности площади. В международной
системе единиц СИ напряжения измеряются
в паскалях: 1 Па=1 Н/м2.
В международной
системе единиц СИ напряжения измеряются
в паскалях: 1 Па=1 Н/м2.
При действии внешних сил наряду с возникновением напряжений происходит изменение объема тела и его формы, т. е. тело деформируется. При этом различают начальное (недеформированное) и конечное (деформированное) состояния тела.
Отнесем недеформированное тело к декартовой системекоординат Oxyz (рис. 2). Положение некоторой точки М в этой системе координат определяется радиус-вектором r(х, у, z). В деформированном состоянии точка М займет новое положение М/ , характеризуемое радиус-вектором

Перемещение, при котором взаимное расположение точек тела не меняется, не сопровождается деформациями. В этом случае говорят, что тело перемещается как жесткое целое (линейное перемещение в пространстве или поворот относительно некоторой точки). С другой стороны, деформация, связанная с изменением формы тела и его объема, невозможна без перемещения его точек.
Рис.2. Композиция вектора перемещения
Деформации тела характеризуются изменением взаимного расположения точек тела до и после деформации. Рассмотрим, например, точку М и близкую к ней точку N, расстояние между которыми в недеформированном состоянии вдоль направления вектора s обозначим через (рис. 2). В деформированном состоянии точкиМ и N переместятся в новое положение (точки М’ и N’), расстояние между которыми обозначим через s’. Предел отношения
называется относительной
линейной деформацией в точке М в
направлении вектора s, рис. 3. Рассматривая
три взаимно перпендикулярных направления,
например, вдоль координатных осей Ох,
Оу и Oz,
получим три компоненты относительных
линейных деформаций
характеризующих
изменение объема тела в процессе
деформации.
3. Рассматривая
три взаимно перпендикулярных направления,
например, вдоль координатных осей Ох,
Оу и Oz,
получим три компоненты относительных
линейных деформаций
характеризующих
изменение объема тела в процессе
деформации.
Для описания деформаций, связанных с изменением формы тела, рассмотрим точку
 плоскости, образованной векторами s1 и s2,
относительно этих векторов. Если заданы
три взаимно ортогональных вектора,
направленных вдоль координатных осей,
то имеются три угловые деформации
,и , которые вместе с тремя линейными
деформациями
,иполностью
определяют деформированное состояние
в точке.
плоскости, образованной векторами s1 и s2,
относительно этих векторов. Если заданы
три взаимно ортогональных вектора,
направленных вдоль координатных осей,
то имеются три угловые деформации
,и , которые вместе с тремя линейными
деформациями
,иполностью
определяют деформированное состояние
в точке.Рис.3. Композиция линейной деформации
Рис. 4. Композиция угловой деформации
Определим упругие деформации стержня предполагая, что изменение его длины при растяжении , называемоеабсолютной продольной деформацией или удлинением, мало по сравнению с его первоначальной длиной . Тогда относительная продольная деформация будет равна
Учитывая, что согласно закону Гука для одноосного растяжения (сжатия)
,
где Е—;модуль продольной упругости материала стержня, а нормальные напряжения определяются по формуле — (в нашем случае Nz
(2) |
Произведение EF принято называть жесткостью
поперечного сечения стержня при
растяжении (сжатии), так как удлинение обратно пропорционально EF.
Рис.6. Модели продольной и поперечной деформаций
Как показывают эксперименты, при растяжении стержня размеры его поперечного сечения уменьшаются (рис. 6), а при сжатии — увеличиваются. Это явление получило название эффекта Пуассона.
По аналогии с продольной деформацией изменение размеров поперечного сечения (на рис. 6) будем называтьабсолютной поперечной деформацией, а — относительной поперечной деформацией. Относительные продольная и поперечная деформации, имеющие противоположные знаки, связаны между собой коэффициентом , являющимся константой материала и называемым коэффициентом поперечной деформации иликоэффициентом Пуассона:
Как известно, для изотропного материала .
Формула (2) для
удлинения стержня
применима
только в случае, когда по длине стержня
ни жесткость поперечного сечения, ни
продольная сила не изменяются (EF=const, Nz =const). Удлинение
стержня со ступенчатым изменением EF и Nz (рис. 7) может быть определено как сумма
удлинений ступеней, у которых EF и Nz постоянны:
Удлинение
стержня со ступенчатым изменением EF и Nz (рис. 7) может быть определено как сумма
удлинений ступеней, у которых EF и Nz постоянны:
(индекс k у модуля продольной упругости означает, что участки стержня могут быть изготовлены из различных материалов). В случае, когда
В качестве тестов для практики расчетов определенных интегралов рекомендую воспользоваться системой входных тестов Т-5, указанных в ПРИЛОЖЕНИИ.
Рис.7. Ступенчатый брус
С упругими продольными деформациями стержня при растяжении (сжатии) связаны продольные перемещения его сечений. На рис. 8 приведены три случая определения таких перемещений, откуда видно, что перемещения поперечных сечений численно равны удлинениям заштрихованных частей стержня:
перемещение свободного торцевого сечения 1—1 при неподвижном другом торцевом сечении (рис.
8, а) численно равно удлинению стержня;
перемещение промежуточного сечения 2—2 (рис. 8, б) численно равно удлинению части стержня, заключенной между данным сечением и сечением неподвижным;
взаимное перемещение сечений 3—3 и 4—4 (рис, 8, в) численно равно удлинению части стержня, заключенной между этими сечениями.
Рис.8. Модели перемещений
Прочность и перемещения при центральном растяжении или сжатии (Лекция №12)
НАПРЯЖЕНИЯ ПРИ РАСТЯЖЕНИИ (СЖАТИИ) ПРИЗМАТИЧЕСКИХ СТЕРЖНЕЙ. РАСЧЕТ НА ПРОЧНОСТЬ
Переходя к изучению введенных основных видов деформации стержней, ограничимся рассмотрением стержней постоянного поперечного сечения с прямолинейной осью, т. е. призматических стержней. Начнем с деформации растяжения (сжатия).
Напомним, что под растяжением (сжатием) понимают такой вид деформации стержня, при котором в его поперечном сечении возникает лишь один внутренний силовой фактор продольная сила Nz. Поскольку продольная сила численно равна сумме проекций, приложенных к одной из отсеченных частей внешних сил на ось стержня (для прямолинейного стержня она совпадает в каждом сечении с осью Oz), то растяжение (сжатие) имеет место, если все внешние силы, действующие по одну сторону от данного поперечного сечения, сводятся к равнодействующей, направленной вдоль оси стержня (рис. 1). Одна и та же продольная сила Nz при действии на различные части стержня (левую или правую) имеет противоположные направления. Знак Nz зависит от характера вызываемой ею деформации. Продольная сила считается положительной, если вызывает растяжение элемента (рис. 2, а), и она отрицательна, если вызывает сжатие (рис. 2,б).
Поскольку продольная сила численно равна сумме проекций, приложенных к одной из отсеченных частей внешних сил на ось стержня (для прямолинейного стержня она совпадает в каждом сечении с осью Oz), то растяжение (сжатие) имеет место, если все внешние силы, действующие по одну сторону от данного поперечного сечения, сводятся к равнодействующей, направленной вдоль оси стержня (рис. 1). Одна и та же продольная сила Nz при действии на различные части стержня (левую или правую) имеет противоположные направления. Знак Nz зависит от характера вызываемой ею деформации. Продольная сила считается положительной, если вызывает растяжение элемента (рис. 2, а), и она отрицательна, если вызывает сжатие (рис. 2,б).
| Рис.1. Расчетная схема | Рис.2. а) Растяжение и б) сжатие |
Для того, чтобы сформулировать предпосылки теории растяжения (сжатия) призматического стержня, обратимся к эксперименту. Представим себе стержень, изготовленный из какого-либо податливого материала (например, резины), на боковую поверхность которого нанесена система продольных и поперечных рисок (рис. 3, а). Эта ортогональная система рисок остается таковой и после приложения растягивающей нагрузки (рис. 3, б). Поскольку поперечные риски являются следами поперечных сечений на поверхности стержня и остаются прямыми и перпендикулярными к оси стержня то это свидетельствует о выполнении гипотезы плоских сечений (Бернулли). С учетом гипотезы об отсутствии поперечного взаимодействия продольных волокон приходим к выводу, что деформация растяжения стержня сводится к одноосному растяжению его продольных волокон, и в поперечном сечении стержня возникают лишь нормальные напряжения а (рис. 4), индекс г у которых опускаем. Ортогональность продольных и поперечных рисок свидетельствует также об отсутствии сдвигов, а, следовательно, и связанных с ними касательных напряжений т в поперечных и продольных сечениях стержня.
Представим себе стержень, изготовленный из какого-либо податливого материала (например, резины), на боковую поверхность которого нанесена система продольных и поперечных рисок (рис. 3, а). Эта ортогональная система рисок остается таковой и после приложения растягивающей нагрузки (рис. 3, б). Поскольку поперечные риски являются следами поперечных сечений на поверхности стержня и остаются прямыми и перпендикулярными к оси стержня то это свидетельствует о выполнении гипотезы плоских сечений (Бернулли). С учетом гипотезы об отсутствии поперечного взаимодействия продольных волокон приходим к выводу, что деформация растяжения стержня сводится к одноосному растяжению его продольных волокон, и в поперечном сечении стержня возникают лишь нормальные напряжения а (рис. 4), индекс г у которых опускаем. Ортогональность продольных и поперечных рисок свидетельствует также об отсутствии сдвигов, а, следовательно, и связанных с ними касательных напряжений т в поперечных и продольных сечениях стержня.
| Рис.3. Модель растянутого стержня | Рис.4. Связь напряжения и усилия |
Тогда продольная сила Nz равная сумме проекции внутренних сил, действующих в данном поперечном сечении площадью F (рис. 4) очевидно будет равна
.
Это соотношение является уравнением равновесия статики, связывающим продольную силу Nz, и нормальное напряжение , которое в общем случае является функцией координат х и у и поэтому не может быть найдено из одного лишь 1 уравнения статики. Таким образом, задача определения напряжений даже в самом простом случае деформирования стержня (растяжении или сжатии) оказывается статически неопределимой.
Необходимое для решения этой задачи дополнительное уравнение вытекает из гипотезы плоских сечений. Поскольку поперечные сечения стержня, оставаясь плоскими и перпендикулярными к оси стержня, в процессе деформирования лишь поступательно перемещаются вдоль оси стержня (что приводит к одинаковому удлинению всех продольных волокон), то приходим к уравнению =const, из которого ввиду однозначности связи и (для линейно-упругого материала этозакон Гука: .) вытекает, что
Поскольку поперечные сечения стержня, оставаясь плоскими и перпендикулярными к оси стержня, в процессе деформирования лишь поступательно перемещаются вдоль оси стержня (что приводит к одинаковому удлинению всех продольных волокон), то приходим к уравнению =const, из которого ввиду однозначности связи и (для линейно-упругого материала этозакон Гука: .) вытекает, что
Решая совместно уравнения получим, что или
Таким образом, при растяжении (сжатии) призматического стержня нормальные напряжения равномерно распределены по поперечному сечению, а касательные напряжения в сечениях отсутствуют, что является следствием гипотезы плоских сечений. Указанное, несмотря на, казалось бы, очевидность и простоту, является фундаментальным результатом, справедливым, строго говоря, лишь для призматического стержня. Однако в инженерной практике его используют и для приближенной оценки нормальных напряжений в стержнях переменного сечения. При этом, чтобы погрешность формулы была невелика, необходимо, чтобы площадь поперечного сечения стержня изменялась достаточно плавно вдоль его оси.
При этом, чтобы погрешность формулы была невелика, необходимо, чтобы площадь поперечного сечения стержня изменялась достаточно плавно вдоль его оси.
Условие прочности при растяжении (сжатии) призматического стержня для стержня из пластического материала (т. е. материала, одинаково работающего на растяжение и сжатие) будет иметь вид:
(1) |
где допускаемое напряжение. Напряжение в условии (1) подставляется по модулю, так как знак в этом случае роли не играет. Для стержней из хрупких материалов, неодинаково сопротивляющихся растяжению и сжатию, знак напряжения имеет принципиальное значение, и условие прочности приходится формулировать отдельно для растяжения и сжатия
где и напряжения растяжения и сжатия, а и ответствующие им допускаемые напряжения.
В практике инженерных расчетов, исходя из условия прочности, решаются три основные задачи механики материалов конструкций. В применении к случаю растяжения (сжатия) призматического стержня эти задачи формулируются следующим образом.
В применении к случаю растяжения (сжатия) призматического стержня эти задачи формулируются следующим образом.
Проверка прочности (поверочный расчет). Этот расчет проводится, если нагрузка (в нашем случае ее представляет Nz), сечение стержня F и его материал заданы.
Необходимо убедиться, что выполняется условие прочности
Проверочный расчет заключается в том, что определяется фактический коэффициент запаса прочности п и сравнивается с нормативным коэффициентом запаса [n]:
где предельное (или опасное) напряжение, т. е. напряжение, вызывающее отказ элемента конструкции (напомним, что, например, для стержня из пластичного материала этопредел текучести или условный предел текучести ).
Подбор сечения (проектный расчет). В этом расчете по Заданной нагрузке (Nz) определяются размеры поперечного сечения стержня (F) из заданного материала ( дано). Минимальное значение F получим, если в условии прочности (1) принять знак равенства:
Минимальное значение F получим, если в условии прочности (1) принять знак равенства:
Определение допускаемой нагрузки, то есть максимального значения нагрузки, которое допускает данный элемент конструкции (F и даны) при выполнении условия прочности.
ПОНЯТИЕ О КОНЦЕНТРАЦИИ НАПРЯЖЕНИЙ, ПРИНЦИП СЕН-ВЕНАНА
Даже для призматического стержня равномерное распределение напряжений по поперечному сечению не всегда имеет место. Так, отклонения от равномерного распределения напряжений наблюдаются в окрестности сечений, содержащих вырезы, выточки, отверстия, трещины, в местах резкого изменения поперечного сечения, а также в местах приложения сосредоточенных сил и т. п. Неравномерное распределение напряжений в указанных местах является следствием искажения плоскостей поперечных сечений или их депланации.
Поясним это явление на примере подверженной растяжению полосы из податливого материала с круговым отверстием, на поверхности которой нанесены продольные и поперечные риски (рис. 5, а). В зоне отверстия имеет место депланация поперечных сечений, вызванная неравномерным растяжением продольных волокон (рис.5, б). При этом наибольшие удлинения и соответственно напряжения max получают волокна возле отверстия. Такое местное увеличение напряжений возле вырезов, выточек, отверстий и т. п., а также в местах приложения сосредоточенных сил, называется у концентрацией напряжений, а источники концентрации напряжений (вырезы, выточки, отверстия и т. п.) получили название концентраторов напряжений.
5, а). В зоне отверстия имеет место депланация поперечных сечений, вызванная неравномерным растяжением продольных волокон (рис.5, б). При этом наибольшие удлинения и соответственно напряжения max получают волокна возле отверстия. Такое местное увеличение напряжений возле вырезов, выточек, отверстий и т. п., а также в местах приложения сосредоточенных сил, называется у концентрацией напряжений, а источники концентрации напряжений (вырезы, выточки, отверстия и т. п.) получили название концентраторов напряжений.
Рис.5. Концентрация напряжений: а) исходное состояние, б) деформированное состояние, в) распространение напряжений
Рассмотренными методами механики деформированного тела, опирающимися на гипотезу плоских сечений, задачи о распределении напряжений в зонах концентрации напряжений не решаются. Такие задачи решаются методами теории упругости или исследуются экспериментально. При этом для практических расчетов вводится так называемый теоретический коэффициент концентрации напряжений , представляющий собой отношение максимальных max и номинальных напряжений: , где номинальные напряжения определяются без учета концентрации напряжений. В приведенном примере растяжения полосы с отверстием , a Fnt площадь поперечного сечения полосы, уменьшенная за счет отверстия («нетто»). Таким образом, играют роль поправочных коэффициентов.
В приведенном примере растяжения полосы с отверстием , a Fnt площадь поперечного сечения полосы, уменьшенная за счет отверстия («нетто»). Таким образом, играют роль поправочных коэффициентов.
Однако, как показали эксперименты и точные решения задач теории упругости, местные отклонения от равномерного распределения напряжений, вызванные концентрацией напряжений, быстро затухают по мере удаления от сечения с концентратором, и на расстояниях порядка ширины сечения распределение напряжений можно считать практически равномерным (рис. 5, в). Отмеченное свойство является частным случаем широко используемого практически во всех разделах механики деформируемого твердого тела (в том числе и теории упругости) принципа Сен-Венана
ОПРЕДЕЛЕНИЕ ДЕФОРМАЦИЙ И ПЕРЕМЕЩЕНИЙ
Определим упругие деформации стержня предполагая, что изменение его длины при растяжении , называемое абсолютной продольной деформацией или удлинением, мало по сравнению с его первоначальной длиной .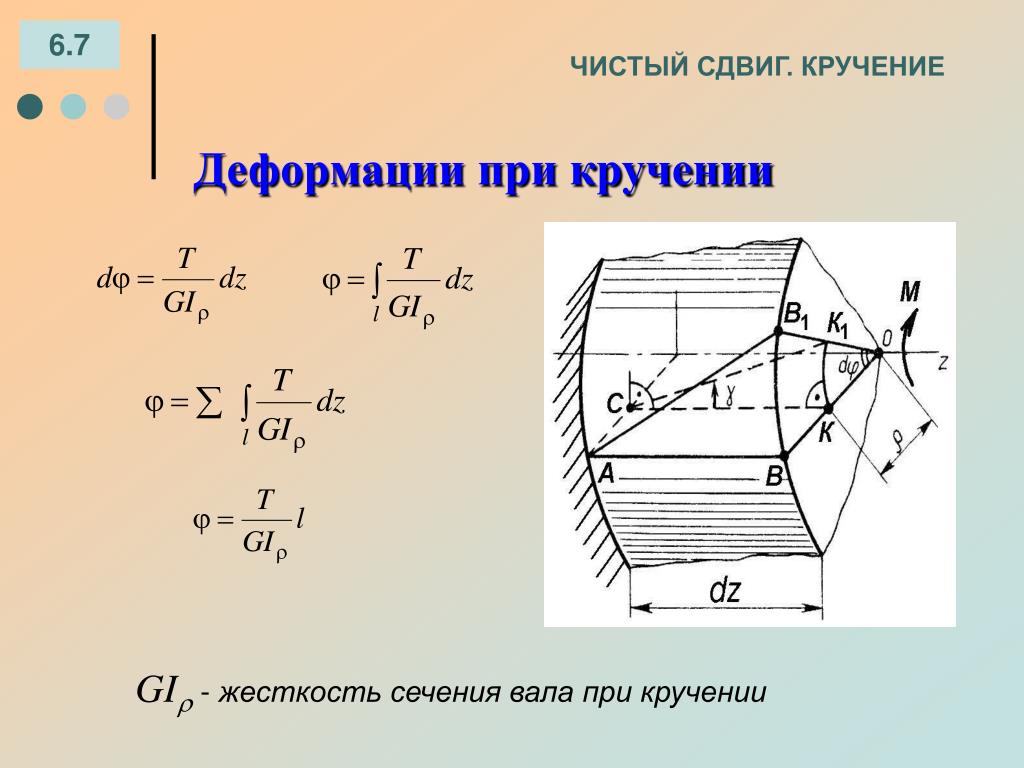 Тогда относительная продольная деформация будет равна
Тогда относительная продольная деформация будет равна
Учитывая, что согласно закону Гука для одноосного растяжения (сжатия)
,
где Е;модуль продольной упругости материала стержня, а нормальные напряжения определяются по формуле (в нашем случае Nz=P), для абсолютной деформации получаем
(2) |
Произведение EF принято называть жесткостью поперечного сечения стержня при растяжении (сжатии), так как удлинение обратно пропорционально EF.
Рис.6. Модели продольной и поперечной деформаций
Как показывают эксперименты, при растяжении стержня размеры его поперечного сечения уменьшаются (рис. 6), а при сжатии увеличиваются. Это явление получило название эффекта Пуассона.
По аналогии с продольной деформацией изменение размеров поперечного сечения (на рис. 6 ) будем называть абсолютной поперечной деформацией, а относительной поперечной деформацией. Относительные продольная и поперечная деформации, имеющие противоположные знаки, связаны между собой коэффициентом , являющимся константой материала и называемым коэффициентом поперечной деформации или коэффициентом Пуассона:
Как известно, для изотропного материала .
Формула (2) для удлинения стержня применима только в случае, когда по длине стержня ни жесткость поперечного сечения, ни продольная сила не изменяются (EF=const, Nz =const). Удлинение стержня со ступенчатым изменением EF и Nz (рис. 7) может быть определено как сумма удлинений ступеней, у которых EF и Nz постоянны:
(индекс k у модуля продольной упругости означает, что участки стержня могут быть изготовлены из различных материалов). В случае, когда Nz и EF меняются по длине стержня l непрерывно и их можно считать постоянными лишь в пределах ступеней длиной dz, обобщая формулу эту, получаем
В качестве тестов для практики расчетов определенных интегралов рекомендую воспользоваться системой входных тестов Т-5, указанных в ПРИЛОЖЕНИИ.
Рис.7. Ступенчатый брус
С упругими продольными деформациями стержня при растяжении (сжатии) связаны продольные перемещения его сечений. На рис. 8 приведены три случая определения таких перемещений, откуда видно, что перемещения поперечных сечений численно равны удлинениям заштрихованных частей стержня:
- перемещение свободного торцевого сечения 11 при неподвижном другом торцевом сечении (рис. 8, а) численно равно удлинению стержня;
- перемещение промежуточного сечения 22 (рис. 8, б) численно равно удлинению части стержня, заключенной между данным сечением и сечением неподвижным;
- взаимное перемещение сечений 33 и 44 (рис, 8, в) численно равно удлинению части стержня, заключенной между этими сечениями.
Рис.8. Модели перемещений
НАПРЯЖЕННОЕ СОСТОЯНИЕ ПРИ РАСТЯЖЕНИИ (СЖАТИИ)
Напряженное состояние при растяжении стержня является одноосным (рис. 9, а). Поскольку на поперечных и продольных площадках касательные напряжения не возникают, то эти площадки являются главными. Причем в случае растяжения , а в случае сжатия .
Рис.9. Напряженное состояние: а ) исходный элемент, б ) компоненты напряжений
Напряжения на площадках, наклоненных к оси стержня под углом , определяются по формулам для упрощенного плоского напряженного состояния:
Площадки с экстремальными касательными напряжениями (рис. 9, б), как известно, наклонены по отношению к исходным под углами (следует и из формулы для ) и равны .
Именно с действием экстремальных связывается появление на боковой поверхности образца из малоуглеродистой стали, испытываемого на растяжение, линий скольжения, ориентированных под углом к оси образца. На площадках с экстремальными действуют и нормальные напряжения, равные .
Дальше…Деформации в сопромате
Реальные тела могут деформироваться, т. е. изменять свою форму и размеры. Деформации тел происходят вследствие нагружения их внешними силами или изменения температуры. При деформации тела его точки, а также мысленно проведенные линии или сечения перемещаются в плоскости или в пространстве относительно своего исходного положения.
При нагружении твердого тела в нем возникают внутренние силы взаимодействия частиц, оказывающие противодействие внешним силам и стремящиеся вернуть частицы тела в положение, которое они занимали до деформации.
При решении задач сопромата различают упругие деформации, исчезающие после прекращения действия вызвавших их сил, и пластические, или остаточные, деформации, не исчезающие после снятия нагрузок. В большинстве случаев для величин деформаций элементов конструкций устанавливают определенные ограничения.
В сопротивлении материалов изучаются следующие основные виды деформирования стержней или виды их деформаций: растяжение и сжатие, сдвиг (или срез), кручение, изгиб. Рассматриваются также более сложные деформации, получающиеся в результате сочетания нескольких основных видов деформаций.
Растяжение или сжатие возникает, например, в случае, когда к стержню вдоль его оси приложены противоположно направленные силы (рис. 3). При этом происходит поступательное перемещение сечений вдоль оси стержня, который при растяжении удлиняется, а при сжатии укорачивается. Изменение первоначальной длины стержня L называется абсолютным удлинением (при растяжении) или абсолютным укорочением (при сжатии).
Отношение абсолютного удлинения (укорочения) к первоначальной длине L стержня или его участка называется средним относительным удлинением (укорочением) на длине L или средней линейной относительной деформацией стержня или его участка:
Истинное линейное относительное удлинение, или относительная линейная деформация в точке, определяется как относительная деформация участка при L→0:
На растяжение или сжатие работают многие элементы конструкций: стержни ферм, колонны, штоки поршневых машин, стяжные болты и др.
Сдвиг, или срез, возникает, когда внешние силы смешают два параллельных плоских сечения стержня одно относительно другого при неизменном расстоянии между ними (рис. 4). Величина смещения dS называется абсолютным сдвигом. Отношение абсолютного сдвига к расстоянию между смещающимися плоскостями (тангенс угла у) называется относительным сдвигом. Вследствие малости угла у можно принять
Относительный сдвиг является угловой деформацией, характеризующей перекос элемента.
На сдвиг, или срез, работают, например, заклепки и болты, скрепляющие элементы, которые внешние силы стремятся сдвинуть друг относительно друга.
Кручение возникает при действии на стержень внешних сил, образующих момент относительно его оси (рис. 5). Деформация кручения сопровождается поворотом поперечных сечений стержня друг относительно друга вокруг его оси. Угол поворота одного сечения стержня относительно другого, находящегося на расстоянии L, называется углом закручивания на длине L. Отношение угла закручивания ф к длине L называется относительным углом закручивания.
На кручение работают валы, шпиндели токарных и сверлильных станков и другие детали.
Изгиб (рис. 6) заключается в искривлении оси прямого стержня или в изменении кривизны кривого стержня. Происходящее при изгибе перемещение какой-либо точки оси стержня выражается вектором, начало которого совмещено с первоначальным положением точки, а конец — с положением той же точки в деформированном стержне, В прямых стержнях перемещения точек, направленные перпендикулярно к начальному положению оси, называются прогибами. Обозначим прогибы буквой w, а наибольший из них — буквой f. При изгибе также происходит поворот сечений стержня вокруг осей, лежащих в плоскостях сечений. Углы поворота сечений относительно своих начальных положений обозначим буквой ф.
На изгиб работают балки междуэтажных перекрытий, мостов, оси железнодорожных вагонов, листовые рессоры, валы, зубья шестерен, спицы колес, рычаги и многие другие детали.
Описанные выше простейшие деформации стержня дают представление об изменении его формы и размеров в целом, но ничего не говорят о степени и характере деформированного состояния материала. Исследования показывают, что деформированное состояние тела является неравномерным и изменяется от точки к точке. При этом деформированное состояние в точке тела полностью определяется шестью компонентами деформации: тремя относительными линейными деформациями и тремя относительными угловыми деформациями.
Деформация линейная угловая — Определение
Определение угловой деформации. Линейная деформация не мо- [c.59]Это происходит в результате действия момента от сил резания, вызывающего угловые перемещения в деталях узла шпинделя (консольное закрепление обрабатываемой заготовки), а также упругих деформаций в местах соединений патрона со шпинделем, деформаций кулачков и др. Для упрощения эксперимента перемещения передней бабки (шпинделя с патроном) определяются в линейных размерностях на определенном плече приложения нагрузки. [c.88]
Одной из важнейших задач сопротивления материалов является оценка жесткости конструкции, т. е. степени ее искажения под действием нагрузки, смещения связей, изменения температуры. Для решения этой задачи необходимо определить перемещения (линейные и угловые) любым образом нагруженной упругой системы (балки, рамы, криволинейного стержня, фермы и т. д.). Та же задача возникает при расчете конструкций на динамические нагрузки и при раскрытии статической неопределимости системы. В последнем случае, как уже отмечалось, составляются так называемые уравнения совместности деформаций, содержащие перемещения определенных сечений. [c.359]
В заключение отметим, что некоторые авторы [36] относят к вводной части курса понятия о линейных и угловых деформациях и о перемещениях. Можно согласиться с тем, что это в известной мере оправдано в вузовском курсе, но в техникумах целесообразнее вводить эти понятия постепенно, по мере возникновения в них надобности. Конечно, понятием перемещение мы в вводной части оперируем (рассматривая сущность расчета на жесткость излагая принцип начальных размеров и т. д.), но не даем строгого определения, считая это понятие достаточно очевидным. [c.59]
Рассмотрим теперь определение линейных и угловых деформаций. Перемещения в направлении радиуса г будем обозначать через п, а в направлении, перпендикулярном к радиусу г, через V. [c.90]
Рассматривая схему деформации при изгибе, можно установить, что при изгибе имеют место перемещения двух типов — линейные /1, /2 (прогибы) и угловые 01, 02 (повороты сечений), как это показано для балки на рис. 12.19 в сечениях 1 и 2. Определение этих перемещений необходимо для оценки жесткости изгибаемого элемента. [c.207]
| Рис. 2.39. Схема для определения компонентов линейных и угловых деформаций. |
Собеседник, искушенный в вопросах механики, даст деформации другое определение, а именно то, которое известно читателям из курса сопротивления материалов. Развивая это определение, он пояснит, что деформация бывает линейной и угловой, что существует понятие деформированного состояния в точке и т. д. Он, естественно, тоже прав. Деформация в таком понимании — это не качественный показатель свойств тела, а количественная характеристика состояния в точке непрерывной среды. [c.138]
Способ движущейся деформации (прокатки) упругих тел позволяет создать линейные и угловые механизмы для осуществления малых перемещений — редукторы с высоким коэффициентом редукции (до нескольких десятков и выше). Применение упругих тел (металлы, упругие полимеры) в качестве элемента редукции способствует снижению стоимости этих механизмов. Дискретный (шаговый) характер позволяет осуществить строго определенную подачу ведомых звеньев. [c.162]
Для определения линейных деформаций точек оболочки Б радиальном направлении в нормальной к оси оболочки плоскости сечения и угловых деформаций (поворотов) точек оболочки применимы формулы [c.150]
По рис. 4.237, на котором представлены результаты опыта 1451, можно заметить, что для имевшегося в этом опыте сложного нагружения, при котором не удовлетворяется условие (4.81), имеет место линейная зависимость (линейная функция с угловым коэффициентом, равным 0,5). Недавно завершенные опыты показали, что компоненты деформаций могут быть представлены в форме, допускающей их определение и тогда, когда условие (4.81) не выдерживается. [c.348]
Определение П.6. Деформированным состоянием тела G называется совокупность линейных и угловых деформаций для всех точек Л G G и любых направлений. [c.584]
Линейные деформации 6 , е ,, характеризуют изменения объема тела в процессе деформирования, а формоизменения тела — угловыми деформациями. Для их определения рассмотрим прямой угол, образованный в недеформированном состоянии двумя отрезками 01> и ОС (рис. 1.5, б). При действии внешних сил указанный угол вое изменится и примет новое значение D 0 С. Величина [c.12]
Статически неопределимые конструкции, составляемые из простейших элементов, дают круг задач, которые могут решаться таким путем. При выполнении расчета усилий, перемещений и напряжений в статически неопределимых системах методами строительной механики возникает необходимость находить упругие характеристики и напряжения в отдельных частях конструкций от известной внешней нагрузки и внешних единичных усилий, прилагаемых в сечениях, которыми рассекается заданная конструкция. Так как отдельные элементы конструкции имеют сложную форму, то определение указанных упругих характеристик и напряжений от заданных нагрузок целесообразнее производить не путем расчета, а экспериментально, выполняя на отдельных простейших тензометрических моделях измерение этих линейных и угловых перемещений и напряжений. Обеспечение условий сопряжения рассмотренных на простейших моделях отдельных элементов в целой статически неопределимой конструкции производится путем расчета с составлением и решением линейных уравнений деформаций, из которых определяются статически неопределимые усилия в сечениях. Напряжения и перемещения в любой точке статически неопределимой конструкции находятся затем сложением замеренных на простейших моделях величин, умноженных на значения соответствующих статически неопределимых усилий. [c.418]
Графический метод определения напряжений по наклонным площадкам используется и для установления зависимости угловых деформаций от линейных. В этом случае по оси абсцисс откладываются линейные деформации, а по оси ординат — половины угловых деформаций. [c.35]
Первый член правой части учитывает влияние на перемещение угловой деформации Дв шарнирной цепи, а второй и третий — влияние линейных деформаций сторон зигзага. Если стержни зигзага горизонтальны, то тангенсы углов наклона стержня к горизонту обращаются в нуль, второй и третий член в выражении упругого груза пропадают, и вычисление упругого груза упрощается. Первый член выражения с упругого груза, т. е. угловую деформацию Д0, можно подсчитать, или исходя из аналитич. приемов определения деформаций или из геометрич. соображений. Первый способ, наиболее общий и пригодный для любой фермы, заключается в нахождении углового перемещения по следующей формуле (Мора) [c.9]
При определении линейных и угловых упругих перемещений сечений вал путем математического моделирования учитываются статические и динамич( кие составляющие рабочих нагрузок на валах, определяемые свойствами в( производимых привлеченными моделями элементов, упругие деформации и зоры в кинематических парах элементов, представленных в модели пресса. [c.531]
Из других теорий прочности, не имеющих широкого распространения, но пригодных для оценки прочности грунтов, следует назвать теорию наибольших деформаций, согласно которой опасное состояние материала наступит в результате того, что его линейные или угловые деформации достигнут некоторого опасного, критического значения, и теорию прочности Гриффитса, по которой разрушение хрупкого тела в результате развития в нем трещины происходит при определенном критическом напряжении. [c.64]
Оценка жесткости обеспечивается проведением расчетов по определению линейных и угловых деформаций при изгибе, угла закручивания при кручении, удлинения при растяжении и сравнения их с допускаемыми. [c.15]
Обычно при решении задач ОМД нахождение компонент тензора связывают не с малыми деформациями (1.2.70) по формуле (1.2.138), а с определением их с помощью вектора скорости V по формуле Док.Стокса (1.2.137), которую с учетом (1.2.90) можно получить из (1.2.138) путем подстановки в нее малых деформаций, определяемых кинематической формулой О.Коши (1.2.70). С другой стороны, физический смысл компонент легко устанавливаегся именно с помощью формулы (1.2.138) диагональные компоненты тензора скоростей деформаций характеризуют изменение во времени линейных размеров окрестности движущейся матфиальной частицы, а боковые — ее угловых размеров. Поэтому диагональные компоненты ( =к) тензора назьшают скоростями деформации изменения линейных размеров, а боковые компоненты (i к) — скоростями деформации изменения угловых размеров или сдвиговыми скоростями деформаций. [c.55]
Деформации корпуса мерного инструмента свидетельствуют о наличии в технологической системе избыточных связей, удалить которые можно лишь путем введения в систему определенного числа и вида (линейные, угловые) подвижностей. Если рассматривать такую технологическую систему как механизм, то определить число и вид указанных подвижностей можно с помощью метода подвижностей, входящего составной частью в теорию самоустанавливающихся механизмов проф. Л. И. Ре-шетова [72, 90 и др.]. В основе этой теории лежит идея о том, что наиболее эффективными механизмами, имеющими повышенную работоспособность и долговечность, являются механизмы без избыточных связей, названные автором теории самоустанавливающимися механизмами. [c.45]
Метод муаровых полос позволяет найти деформации и напряжения на поверхности контакта элементов композитной модели без использования поляризационно-оптического метода 70, 72]. Однако, если линейные деформации е и Ву можно найти этим методом довольно точно, то на деформацию сдвига уху сильно влияют угловые погрешности в установке эталонной сетки. Это отражается и на точности определения главных напряжений. Деформацию сдвига более точно можно вычислить по данным поляризационно-оцтиче-ских измерений [c.34]
КОЛЕБАНИЯ (вынужденные [возникают в какой-либо системе под влиянием внешнего воздействия переменного пружинного маятника (характеризуется переходным режимом и установившимся состоянием вынужденных колебаний резонанс выявляется резким возрастанием вынужденных механических колебаний при приближении угловой частоты гармонических колебаний возмущающей силы к значению резонансной частоты) электрические осуществляют в электрическом колебательном контуре с включением в него источника электрической энергии, ЭДС которого изменяется с течением времени] гармонические относятся к периодическим колебаниям, а изменение состояния их происходит по закону синуса или косинуса затухающие характеризуются уменьшающимися значениями размаха колебаний с течением времени, вызываемых трением, сопротивлением окружающей среды и возбуждением волн когерентные должны быть гармоническими и иметь одинаковую частоту и постоянную разность фаз во времени комбинационные возникают при воздействии на нелинейную колебательную систему двух или большего числа гармонических колебаний с различными частотами кристаллической решетки является одним из основных видов внутреннего движения твердого тела, при котором составляющие его частицы колеблются около положений равновесия крутильные возршкают в упругой системе при периодически меняющейся деформации кручения отдельных ее элементов магнитострикционные возникают в ферромагнетиках при их намагничивании в периодически изменяющемся магнитном поле модулированные имеют частоту, меньшую, чем частота колебаний, а также определенный закон изменения амплитуды, частоты или фазы колебаний неавтономные описываются уравнениями, в которые явно входит время некогерентные характерны для гармонических колебаний, частоты которых различны незатухающие не меняют свою энергию со временем нормальные относятся к гармоническим собственным колебаниям в линейных колебательных системах [c.242]
В общем случае двухосного напряженного состояния, имеющего место на свободной от внешних нагрузок поверхности деформированного тела, определяются нормальные напряжения Tj., а,, и касательное напряжение или главные напряжения, а2 и угол наклона главных площадок а. Для их определения с помощью электротензометрии необходимо знать две линейные е , у и одну угловую деформации. [c.529]
В то же время, как было отмечено ранее, сдвиги на стыке углового и прямолинейного участков распространяются в обе стороны от линии стыка, и зона пластической деформации частично охватывает участки, противостоящие прямолинейным участкам контура отверстия матрицы. Рекомендации по определению кон- тура заготовки, приводимые на основании результатов экспериментов и производственного опыта [50], и, в частности, рекомендации Б. П. Звороно [20], позволяют приближенно принять, что пластическая де(формация распространяется в обе стороны от линии стыка на одинаковое расстояние. Отсюда следует, что касательное напряжение, действующее на стыке, не может достигать значения, равного половине напряжения текучести, так как элементы, расположенные вблизи стыка будут, получать не только сдвиговые, но и линейные деформации 8р и бд в тангенциальном и радиальном направлениях. В первом приближении можно принять, что на стыке величина сдвиговой деформации уменьшается вдвое за счет большей протяженности зоны деформирования в тангенциальном направлении в реальных условиях по сравнению 198 [c.198]
Чем выше точность измерений, тем более низким оказывается значение предела пропорциональности, и таким образом точное выполнение условия пропорциональности напряжения и деформации возможно только при низких напряжениях. Ввиду этого оказалось необходимым ввести некоторое условие, уточняющее методику определения предела пропорциональности, независи.мо от физического значения этой величины. В качестве такого условия может быть установлено определенное изменение модуля упругости, определяемого как угловой коэффициент линейной части диаграммы растяжения и уменьшающегося с увеличением упругой деформации. [c.189]
Первое. Понятие направлений , фигурирующих при определении линейных или угловых деформаций в точке тела, подразумевает, по существу, некоторые физические линии, соединяющие в теле реальные частицы. Такие линии или их совокупности, образующие правильные фигуры, можно, к примеру, нанести краской на боковой поверхности балки (рис. 3.1, б). При использовании легко деформируемого материала типа резины можно наблюдать, как в процессе нагружения квадрат ММ1К превращается в вытянутый прямоугольник. Это происходит за счет линейных деформаций и е . Одновременно аналогичный квадрат ВСОЕ, расположенный ближе к правой опоре, превращается в косоугольную фигуру вследствие появления относительных сдвигов у (рис. 3.1, в). [c.56]
Определения деформированного состояния материала типы деформаций, определение дефс мации дефс мация упругая и пластическая (остаточная) растяжение (сжатие) и линейная де-фмация, сдвиг (фез) и угловая деф[c.2]
Меню сайтаРасчет геометрических характеристик сечений он-лайн NEW — считает любые сечения (сложные). Определяет: площадь сечения, моменты инерции, моменты сопротивления.
Расчет балок на прочность он-лайн — построение эпюр Mx, Qy, нахождение максимального изгибающего момента Mx, максимальной
сдвигающей силы Qy, расчет прогибов, подбор профиля и др. Все просто, все он-лайн. Расчет рам, ферм балок он-лайн NEW — эпюры Q, M, N, перемещения узлов. Удобный графический интерфейс. Считает любые схемы. Лекции — теория, практика, задачи… Примеры решения задач Справочная информация — ГОСТы, сортамент проката, свойства материалов и другое. Программы по сопромату (построение эпюр, различные калькуляторы, шпоры и другое). Форум сопромата и механики Книги — разная литература по теме. Заказать задачу Друзья сайта (ссылки) WIKIbetta Разработчикам (сотрудничество) Веб-мастерам (партнёрка) О проекте, контакты Подпроекты |
Базовый курс лекций по сопромату, теория, практика, задачи.::Оглавление:: 2. Кручение. 2.3. Деформации и перемещения при кручении валов. Для вычисления деформаций вала при кручении воспользуемся формулой (2.7) (2.17) Деформация вала на длине z (взаимный угол сечений) равна (2.18) Если крутящий момент и величина GIp, называемая жесткостью вала при кручении, постоянны на всем участке интегрирования, то (2.19) Аналогично, для вала длиной l получим (2.20) Эта формула по своей структуре аналогична формуле для определения деформаций при растяжении — сжатии. Угол закручивания, приходящийся на единицу длины, называют относительным углом закручивания. Он равен (2.21) Для обеспечения требуемой жесткости вала необходимо, чтобы наибольший относительный угол закручивания не превосходил допускаемого, т.е. (2.22) Эта формула выражает условие жесткости вала при кручении. В этой формуле — допускаемый относительный угол закручивания в радианах на единицу длины вала. В большинстве случаев допускаемый относительный угол закручивания задают в градусах на 1 м длины, тогда из формулы (2.22) получим: (2.23) Угол выбирают в зависимости от назначения вала и его размеров. Для валов средних размеров в «Справочнике машиностроителя» рекомендуется принимать допускаемый угол закручивания равным 0,5 градуса на 1 метр длины. Из условия (2.23) можно определить диаметр вала по заданной жесткости. Получаем (2.24) ::Оглавление:: |
СообществоВходРешение задачРасчет редукторовДля Android (рекомендую)NEW Mobile Beam 2.0 Программа для расчета балок на прочность на Вашем Android устройстве… Java 2 ME |
Законы, гипотезы и допущения, лежащие в основе науки о сопротивлении материалов. Виды нагрузок и деформаций.
Сопротивление материалов
Основные положения сопромата
Наука о сопротивлении материалов (сопромат) опирается на законы теоретической механики, особенно ее раздела — статики, тем не менее, некоторые положения и допущения, принятые в теоретической механике для сопромата не приемлемы.
Так, например, действующие на тело силы или системы сил нельзя заменять равнодействующей или эквивалентной силой, силу нельзя переносить вдоль линии ее действия, пару сил нельзя перемещать в плоскости ее действия.
Эти правила имеют исключение.
Например, силы, приложенные к небольшим участкам поверхности тела, как и в теоретической механике считаются сосредоточенными, т. е. приложенными к точке, а реактивные силы, возникающие в защемленном конце бруса заменяются реактивной силой и реактивным моментом. Такие замены не вносят существенных изменений в условия деформации тела.
Это положение называют принципом смягчения граничных условий, или принципом Сен-Венана, по имени французского ученого, механика и инженера Адемара Жан-Клод Барре Сен-Венана (1797-1886 г.г.)
Принцип Сен-Венана можно сформулировать так: в точках тела, достаточно удаленных от мест приложения внешних сил, модуль внутренних сил мало зависит от конкретного способа приложения сил.
Формула для определения нормальных напряжений σ = F/S справедлива только для достаточно удаленных от места приложения внешней нагрузки поперечных сечений стержня. Вблизи места приложения внешней нагрузки, в общем случае нагружения, гипотеза плоских сечений не выполняется, поскольку здесь распределение деформаций и напряжений носит более сложный характер и требует точных методов определения.
Суть принципа Сен-Венана, предложенного французским ученым Адемар Жан-Клод Барре де Сен-Венаном (A. Saint Venant, 1797 — 1886), заключается в следующем:
Если размеры области приложения внешней нагрузки невелики по сравнению с размерами поперечного сечения стержня, то в сечениях, достаточно удаленных от места приложения нагрузки, напряжения и деформации мало зависят от способа приложения этой нагрузки.
Справедливость принципа Сен-Венана не имеет теоретического доказательства, но она подтверждается многочисленными экспериментами и опытами.
Основываясь на этом принципе, при расчетах принимают, что в местах приложения внешних сил внутренние силы меняются скачкообразно, т. е. вводится понятие локального напряжения, быстро (моментально) убывающего при удалении от места приложения нагрузки. Если же рассматривать на брусе реальный участок приложения внешней нагрузки, то напряжения распределяются в его близлежащих сечениях по сложным закономерностям, тем не менее, они быстро убывают по мере удаления от площадки, к которой приложена нагрузка..
***
Основные гипотезы и допущения, принимаемые в сопромате.
При практических расчетах различных конструкций способами и методами сопротивления материалов принимают некоторые упрощения, вызванные невозможностью установить влияние некоторых свойств реальных материалов или элементов конструкций.
Так, например, материал любой детали или конструкции не является строго однородными по структуре, поскольку в его объеме присутствуют различные дефекты, не поддающиеся учету и расчету.
По этой причине в большинстве случаев приходится условно принимать, что физические свойства материала по всему его объему остаются постоянными, пренебрегая этими дефектами и реальной неоднородностью.
Такие упрощения в сопромате называют гипотезами и допущениями.
Гипотезы и допущения принимаемые при расчетах
Гипотеза об отсутствии первоначальных внутренних усилий предполагает, что если нет причин, вызывающих деформацию тела (нагрузка, температура и т. п.), то во всех его точках внутренние усилия равны нулю. Таким образом, не принимаются во внимание силы взаимодействия между частицами ненагруженного тела.
Допущение об однородности материала — при расчетах полагают, что материал во всех точках тела обладает одинаковыми физико-механическими свойствами.
Допущение о непрерывности материала — согласно этому допущению, материал любого тела имеет непрерывное строение и представляет собой сплошную среду (единый массив). Это допущение позволяет применять при расчетах методы высшей математики (дифференциальное и интегральное исчисления), которые манипулируют понятиями бесконечно малых величин.
Допущение об изотропности материала предполагает, что материал обладает одинаковыми физико-механическими свойствами во всех направлениях. Это допущение хорошо подтверждается практическими исследованиями для таких материалов, как металлы, пластмассы, камень, железобетон.
Но для некоторых материалов может приниматься лишь приближенно, а для таких материалов, как древесина или слюда приниматься не может, поскольку они явно не обладают одинаковыми свойствами в разных направлениях, т. е. анизотропны.
Допущение об идеальной упругости предполагает, что в известных пределах нагружения материал обладает идеальной упругостью, т. е. после снятия нагрузки деформации полностью исчезают.
Гипотезы и допущения, связанные с деформациями элементов конструкций
Допущение о малости перемещений, или принцип начальных размеров предполагает, что деформации тела и связанные с ними перемещения точек и сечений малы по сравнению с размерами тела. На основании этого допущения пренебрегают некоторым изменением направления внешних сил, вызванных деформаций тела (пример: не учитывают, что вектор силы при изгибе бруса несколько отклоняется от начального направления в результате деформации).
Допущение о линейной деформируемости тел предполагает, что перемещения точек и сечений упругого тела в известных пределах нагружения прямо пропорциональны силам, вызывающим эти перемещения (по сути, это допущение характеризует закон Гука, который применим лишь в определенном интервале нагрузок).
Гипотеза плоских сечений, или гипотеза Бернулли предполагает, что плоские поперечные сечения, проведенные в теле до деформации, остаются при деформации плоскими и нормальными к оси в известных пределах нагружения.
Эта гипотеза была сформулирована швейцарским ученым Я. Бернулли (1654-1705 г.г.) и положена в основу при изучении основных видов деформаций бруса.
Гипотеза о ненадавливании волокон предполагает, что если мысленно представить брус состоящим из бесконечного количества продольных волокон, то эти волокна не оказывают друг на друга силового воздействия (т. е. не давят друг на друга) в определенном интервале нагрузок и деформаций.
К основным гипотезам сопротивления материалов относится, также, принцип независимости действия сил, предполагающий, что в результате действия на тело нескольких внешних нагрузок, внутренние силы, напряжения, перемещения и деформации в любом месте могут быть определены, как сумма этих величин, вызываемых каждой нагрузкой в отдельности.
Принцип независимости действия сил применим только для конструкций, подверженных относительно небольшим деформациям, пропорциональным действующим нагрузкам.
***
Виды нагрузок, возникающих в конструкциях и их элементах
В процессе работы машин и сооружений их узлы, детали и составные элементы воспринимают и передают друг другу различные нагрузки, т. е. силовые воздействия, вызывающие изменения внутренних сил и деформацию узлов, деталей и т. п.
Действующие на элементы конструкций нагрузки бывают массовыми или объемными (сила тяжести, сила инерции), либо поверхностными силами контактного взаимодействия рассматриваемого элемента с соседними элементами или прилегающей к нему средой (пар, жидкость и т. п.).
Поверхностные нагрузки бывают сосредоточенные или распределенные.
Кроме того, различают нагрузки статические (постоянные или медленно изменяющиеся) и динамические (изменяющиеся быстроударные, повторно-переменные, инерционные и т. п.).
При расчете конструкций методами сопротивления материалов в число внешних нагрузок включаются реакции связей и силы инерции (при достаточно быстром ускорении).
***
Виды деформаций, возникающих в конструкциях и их элементах
Основные деформации, возникающие в процессе эксплуатации конструкций:
Растяжение (тросы, цепи, вертикально подвешенные брусья и т. п.).
Сжатие (колонны, кирпичная кладка, пуансоны штампов и т. п.).
Смятие (заклепки, болтовые соединения деталей)
Сдвиг (заклепки, болты, швы сварных соединений и т. п.). Деформацию сдвига, доведенную до разрушения материала, называют срезом (резка металла ножницами, штамповка деталей и т. п.) или сколом (хрупкие материалы — камень, стекло и т. п.).
Кручение (валы, передающие мощность при вращательном движении и т. п.).
Изгиб (горизонтальные балки, валы, зубья зубчатых передач и т. п.). Различают несколько видов изгиба — чистый, поперечный, косой, продольный.
На практике очень часто элементы конструкций подвергаются действию нагрузок, вызывающих одновременно несколько основных деформаций.
***
Материалы раздела «Сопротивление материалов»:
Метод сечений. Напряжения
Главная страница
Дистанционное образование
Специальности
Учебные дисциплины
Олимпиады и тесты
№ вопроса |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
Правильный вариант ответа |
2 |
2 |
3 |
1 |
3 |
2 |
1 |
3 |
1 |
3 |
СОПРОТИВЛЕНИЕ МАТЕРИАЛОВ
Предисловие …. 6Глава 1. Введение …. 7
1. Сопротивление материалов — наука о прочности и надежности конструкций …. 7
2. Модели прочностной надежности …. 9
Глава 2. Напряжения …. 23
3. Нормальные и касательные напряжения …. 23
4. Напряженное состояние в точке … 29
5. Плоское напряженное состояние …. 32
6. Объемное напряженное состояние …. 40
7. Дифференциальные уравнения равновесия элемента тела и краевые условия …. 47
Глава 3. Деформации …. 57
8. Перемещения и деформации …. 57
9. Связь перемещений и деформаций …. 60
10. Линейная деформация в произвольном направлении. Главные деформации, тензор деформаций …. 63
11. Уравнения совместности деформаций …. 67
Глава 4. Механические свойства конструкционных материалов …. 70
12. Диаграммы деформирования, пределы текучести и прочности …. 70
13. Деформации и характеристики пластичности …. 76
14. Истинные диаграммы деформирования и их схематизация …. 82
15. Ползучесть и длительная прочность …. 87
16. Усталость материала и элементов конструкций …. 92
17. Малоцикловая усталость …. 100
Глава 5. Модели упругости, пластичности и ползучести …. 107
18. Модели упругости …. 107
19. Модели пластичности …. 116
20. Модели ползучести и вязкоупругости …. 130
Глава 6. Растяжение и сжатие стержней …. 141
21. Растяжение и сжатие стержней сосредоточенными и распределенными силами …. 141
22. Статически неопределимые задачи растяжения и сжатия стержней …. 150
23. Стержневые системы (фермы) …. 159
24. Статически неопределимые стержневые системы …. 166
25. Гибкие нити …. 175
Глава 7. Кручение стержней …. 183
26. Кручение круглых валов …. 183
27. Общая задача кручения стержней и концентрация напряжений …. 196
28. Кручение тонкостенных стержней …. 210
Глава 8. Изгиб стержней …. 220
29. Гипотеза плоских сечений и нормальные напряжения изгиба …. 220
30. Упруго-геометрические характеристики сечения стержня при изгибе. Главные оси, главные моменты инерции …. 231
31. Условия равновесия элемента стержня и касательные напряжения изгиба …. 244
32. Изгиб и растяжение стержней с учетом деформации пластичности и ползучести …. 259
33. Прочностные модели надежности при изгибе …. 274
34. Прогибы стержней …. 282
Глава 9. Потенциальная энергия деформации, вариационные методы расчета конструкций, общие свойства упругих систем …. 305
35. Потенциальная энергия деформации …. 305
36. Вариационные методы …. 318
37. Вариационные методы и общие свойства упругих систем …. 334
Глава 10. Сложные модели стержней …. 345
38. Тонкостенные стержни …. 345
39. Полупространственные модели стержня …. 376
Глава 11. Кольца …. 382
40. Изгиб колец …. 382
41. Осесимметричная деформация колец …. 387
Глава 12. Динамика и устойчивость стержней …. 392
42. Изгибные и продольные колебания стержней …. 392
43. Критические частоты вращения и крутильные колебания валов …. 413
44. Устойчивость стержней …. 425
Глава 13. Модели разрушения …. 443
45. Модели статического и длительного разрушения …. 443
46. Модели усталостного и малоциклового разрушения …. 460
Глава 14 Цилиндры и диски …. 467
47. Прочностные модели толстостенных труб и цилиндров. Напряжения и деформации …. 467
48. Прочностные модели дисков …. 482
Глава 15. Балки на упругом основании, криволинейные стержни и пружины …. 497
49. Изгиб балок на упругом основании …. 497
50. Криволинейные стержни и пружины …. 503
Глава 16. Пластинки и оболочки …. 518
51. Пластинки …. 518
52. Цилиндрические оболочки …. 533
53. Приближенные методы расчета прочности и устойчивости оболочек вращения при осесимметричном нагружении …. 541
Глава 17. Метод конечных элементов …. 550
54. Введение в метод конечных элементов …. 550
55. Основные уравнения метода конечных элементов …. 553
% PDF-1.3 % 227 0 объект > эндобдж xref 227 77 0000000016 00000 н. 0000001909 00000 н. 0000002006 00000 н. 0000003603 00000 п. 0000003823 00000 н. 0000004376 00000 п. 0000004428 00000 н. 0000004480 00000 н. 0000004532 00000 н. 0000004584 00000 н. 0000004636 00000 н. 0000004854 00000 н. 0000005412 00000 н. 0000005464 00000 н. 0000005505 00000 н. 0000005557 00000 н. 0000005609 00000 н. 0000005661 00000 п. 0000005683 00000 п. 0000006210 00000 н. 0000006770 00000 н. 0000006994 00000 н. 0000007210 00000 н. 0000007807 00000 н. 0000007829 00000 н. 0000008160 00000 н. 0000008397 00000 н. 0000009045 00000 н. 0000009067 00000 н. 0000009625 00000 н. 0000009861 00000 н. 0000010006 00000 п. 0000010698 00000 п. 0000010720 00000 п. 0000011342 00000 п. 0000011364 00000 п. 0000011977 00000 п. 0000011999 00000 н. 0000012580 00000 п. 0000012602 00000 п. 0000012971 00000 п. 0000013516 00000 п. 0000015595 00000 п. 0000016547 00000 п. 0000017087 00000 п. 0000017450 00000 п. 0000017960 00000 п. 0000017982 00000 п. 0000052212 00000 п. 0000075229 00000 п. 0000075308 00000 п. 0000094496 00000 п. 0000120423 00000 н. 0000131569 00000 н. 0000131796 00000 н. 0000132043 00000 н. 0000132251 00000 н. 0000133064 00000 н. 0000133402 00000 н. 0000133740 00000 н. 0000134190 00000 н. 0000140310 00000 п. 0000140524 00000 н. 0000143203 00000 н. 0000143496 00000 н. 0000143886 00000 н. 0000144006 00000 н. 0000144519 00000 п. 0000144848 00000 н. 0000153859 00000 н. 0000154434 00000 н. 0000155015 00000 н. ۭ C + 7Z ߪ Ƽ ? u_cphpkzi} Q # y4P />
Различные сроки смещения, прогиба и деформации
Как инженер-строитель, одним из наиболее часто используемых терминов является смещение, отклонение и деформация.эти термины, которые часто обсуждаются в проектировании конструкций. У меня есть проблема, связанная с этим термином, так как я работаю проектировщиком конструкций в консультанте или генеральном подрядчике. термин для отклонения очень близко к упругой деформации, в то время как для деформации и смещения обычно используется для пластической деформации.
Объяснение упругой и пластической деформации будет размещено в следующем посте. Проще говоря, упругость (инженер-строитель) представляет собой состояние, при котором узел, соединение балки может вернуться в нормальную форму после получения нагрузки на балку.для пластика — это состояние, при котором узел, соединение балки не может вернуться к исходной форме после воздействия нагрузки. Фаза пластической деформации переживает упругую деформацию. Во время моего объяснения у меня есть четкое мнение других пользователей сети об этом случае.
Это лучший ответ (я думаю) от Quora.com о смещении, прогибе и деформации:
В области проектирования конструкций это тесно связанные термины, которые иногда используются как взаимозаменяемые, хотя, если вы хотите конкретизировать, есть случаи, когда один термин более уместен, чем другой.
Вот как я понимаю термины, хотя мне было бы любопытно узнать, не согласен ли кто-нибудь.
Смещение — это расстояние, на которое один узел или элемент (балка, колонна, рама и т. Д.) Переместился из своего исходного положения. Движение может быть результатом отклонения луча, но оно также может быть результатом движения всего объекта без искажений, как коробка, скользящая по поверхности с трением. Смещение можно измерить как по расстоянию, так и по вращению.
Отклонение — это расстояние, на которое объект изгибается, поворачивается от своего исходного положения. Обычно я предполагаю, что отклонение объекта не включает жесткое движение объекта.
Деформация — это фактическая деформация, возникающая в элементе конструкции. Чаще всего речь идет об упругих и пластических деформациях. Упругие деформации — это те деформации, которые после снятия нагрузки возвращаются к исходной неотклоненной форме.Пластические деформации — это те деформации, которые останутся даже после снятия нагрузки.
Поскольку большинство конструкций надежно прикреплены к своему основанию, движения твердого тела, как правило, отсутствуют, а смещение и отклонение являются частными схожими понятиями. Я бы сказал, что выбросы — это деформации. Смещения и прогибы обычно представляют собой меры расстояния (или отношения этого расстояния к значимому значению, например, длине элемента), в то время как деформация — это то, что произошло с элементом, что вызвало смещения / прогибы.И, наконец, на моей рабочей стадии я предпочитаю использовать термин отклонения в своем анализе, относящемся к упругой деформации, линейному статическому анализу. для пластической стадии деформации, динамической, взрыва, падающего объекта и других я предпочитаю использовать термин «смещение» и «деформация».
Сообщите мне, что у вас есть хорошая идея. Ваше здоровье
Страница не найдена | MIT
Перейти к содержанию ↓- Образование
- Исследовать
- Инновации
- Прием + помощь
- Студенческая жизнь
- Новости
- Выпускников
- О MIT
- Подробнее ↓
- Прием + помощь
- Студенческая жизнь
- Новости
- Выпускников
- О MIT
Попробуйте поискать что-нибудь еще! Что вы ищете? Увидеть больше результатов
Предложения или отзывы?
Кривая деформации — обзор
Результаты, описанные выше, основаны на теории мелкой оболочки.Фактически, подавляющее большинство исследований, посвященных проблемам устойчивости оболочек, используют эту теорию. Причину такого предпочтения легко понять. Это касается относительной простоты основных уравнений теории пологих оболочек, обусловленной основным предположением, что метрики недеформированной средней поверхности оболочки могут быть заменены метрикой ее базовой плоскости. Это приближение, конечно, не всегда допускается, и в этом случае следует использовать более общие уравнения.
Существует несколько доступных формулировок, которые превосходят ограничения, накладываемые уравнениями для мелкой оболочки, в разной степени (см. Раздел 1.1). Это связано с тенденцией к упрощению формулировок с целью облегчить решение окончательных основных уравнений.
Современное состояние дел в области компьютерных методов численного решения позволяет решать задачи теории нелинейных оболочек без использования упрощающих предположений.Другими словами, численные методы решения не требуют упрощения уравнений, а это означает, что мы можем использовать наиболее точную версию теории. Поэтому мы начнем с обзора решений, которые получаются из общих уравнений осесимметрично деформированных сферических крышек [см. Шилкрут, 1969b, 1974; Герлаку, Морар и Шилкрут, 1970] (см. Раздел 1.1).
a) Колпачки, нагруженные внешними изгибающими моментами (чистый изгиб), равномерно распределенными по краю
В общем случае поведение сферического колпачка определяется двумя параметрами вместо одного, как в случае неглубокой оболочки.Безразмерный подъем вершины ξ¯ теперь определяется точным соотношением:
(5.13) ξ¯ = W * h = Rh2 − cosθ0,
, где h — толщина оболочки, R — радиус средней поверхности крышки, θ 0 составляет половину центрального угла недеформированной крышки, а Вт, * — физическая величина подъема вершины. Когда θ 0 мало (т.е. θ 0 <<1), мы можем записать:
(5.14) ξ¯≈Rhθ022.
Это выражение используется в формулировке мелкой скорлупы.
Симметрия и граничные условия для чистого изгиба и неподвижной, свободно опертой кромки следующие (см. Раздел 1.1):
(5.15) Φ0 = u0 = 0
(5.16) uθ0 = 0; Mξθ0 = M.
Для подвижных опор условия (5.16) необходимо заменить на:
(5.17) Nξθ0 = N или Hθ0 = H
(см. Выражения (1.1) — (1.12)). M , N и H здесь представляют собой внешний изгибающий момент кромки и равнодействующие кромочные силы в радиальном и горизонтальном направлениях соответственно.Первое из условий (5.17) соответствует случаю свободы движения кромки Φ¯ = θ0 в радиальном направлении, а второе условие (5.17) относится к подвижности кромки в горизонтальном направлении. В случае пологих оболочек два условия (5.17) эквивалентны друг другу. В нашем обзоре будет рассматриваться только первый случай ( N ξ (θ 0 ) = N ) из (5.17) простой опоры.
Основные уравнения для случая, когда не учитываются температурные эффекты, даются уравнениями (1.25) и (1.26). Наконец, стоит отметить, что после перехода к безразмерным параметрам полученные уравнения (1.25) и (1.26) содержат параметры R / h (в случае колпачков) или a /. h (в случае пластин) явно, что является одним из существенных изменений, которое отличает общие уравнения оболочки от уравнений мелкой оболочки.
Теперь мы представим некоторые результаты, которые были получены для оболочек из изотропного упругого материала (коэффициент Пуассона v = 0.3) [см. Также Герлаку, Морар и Шилкрут, 1970; Барладеану, Вырлан, Герлаку, Шевандронов и Шилкрут, 1973; Шилкрут, Барладеану, Вырлан, Герлаку, Фишберг, Черкезов, 1978]. На рисунках 5.18-5.23 представлены первые части кривых деформации M k = M k (ξ) для неподвижной шарнирной кромки для ряда отношений радиуса к толщине R / h . M k — безразмерный краевой момент Mk = Mξθ0 = Mξ * θ0RD, D = Eh4121 − v2.
Рисунок 5.18. Результаты для глубокой оболочки, неподвижно навесной, R / h = 10.
Рис. 5.19. Результаты для глубокой оболочки, неподвижно навесной, R / h = 20.
Рис. 5.20. Результаты для глубокой оболочки, неподвижно навесной, R / h = 50.
Рисунок 5.21. Результаты для глубокой оболочки, неподвижно навесной, R / h = 100.
Рисунок 5.22. Результаты для глубокой оболочки, неподвижно навесной, R / h = 200.
Рисунок 5.23. Результаты для глубокой оболочки, подвижной шарнирной, R / h = 500.
Безразмерный параметр ξ = w * 0R на этих рисунках характеризует прогиб вершины крышки. Каждая кривая деформации отмечена значением параметра θ0 / ξ¯, для которого кривая была получена. (Обратите внимание, что в этом случае двумя параметрами, которые описывают геометрию недеформированной крышки, являются отношения R / h и θ0 / ξ¯).
Рисунок 5.24. Кривые решения, подвижный навесной, R / h = 500.
Зависимость предельной нагрузки M k + от θ 0 для разных значений R / h показано на рисунке 5.25. Все графики на этом рисунке исходят из фиксированного значения, M k + = 1,3, которое оказывается минимальным значением (для рассматриваемого класса крышек), при котором предельные точки возникают для первого время.Как и минимальное значение M k + = 1,3, оказывается, что величина подъема вершины ξ¯, при которой предельные точки возникают впервые, является константой, определяемой как ξ¯≅0,7. Значения θ 0 , которые соответствуют этой особой точке, как и следовало ожидать, зависят от отношения радиуса к толщине R / h (см. Рис. 5.25). Действительно, когда R / h = 20, тогда θ¯0 = 0,26, например; если R / h = 100, то θ¯0 = 0.12; если R / h = 1000, θ¯0 = 0,037; и так далее. Во всех этих случаях ξ¯ = ξ¯≅0,7. Те же характеристики присущи неподвижной шарнирной неглубокой крышке (см. Раздел 3.7).
Рисунок 5.25. Предельные нагрузки для глубокой оболочки в зависимости от θ 0 для различных значений R / h .
При ξ¯ = ξ¯0≅0,7 соответствующее значение M k + и M k — , равно M k + = M k — = 1.3, в соответствии со свойством симметрии негладких оболочек, описанным в разделе 2.9, где соотношение (5.18) между верхними M + и нижними M — предельными нагрузками было дано как
(5.18) M + + M− = 21 + v
Непосредственно из (5.18) следует, что наименьшее значение M + = M — = 1,3 принадлежит кепке с ξ¯ = ξ¯0≅0,7, что соответствует центру симметрии C соответствующей кривой деформации (см. раздел 2.9). График M k — = M k — (θ 0 ) (для фиксированного R / h ) является зеркальным отображением графика M k + = M k + (θ 0 ) относительно ординаты M k = 1,3 (см. Рис. 5.25). Этот эффект является следствием соотношения (5.18).Рисунок 5.25 показывает, что кривые M k + = M k + (θ 0 ), и, следовательно, также M k — = M k — (θ 0 ) ( R / h фиксированный), почти прямые, за исключением области, близкой к M k + = 1.3.
Семейство кривых M k + ( R / h ) для θ 0 = const, (неподвижные петли) представлено на рисунке 5.26. На рисунке 5.27 представлена кривая равновесия для случая R / h = 500, θ 0 = 0,3 и неподвижных краев (только половина общей кривой отклика — до центра его симметрии C — Показано). Первая часть этой кривой уже была показана на Рисунке 5.23. Следует отметить, что с качественной точки зрения поведение аналогично неглубокой оболочке (см., Например, рис. 2.7 и 2.8).
Рисунок 5.26. Предельные нагрузки по сравнению с R / h для θ 0 = 0.2.
Рисунок 5.27. Кривая отклика для глубокой оболочки, частный случай R / h = 500, θ 0 = 0,3.
Интересно, что мы также показываем некоторые результаты для плит с подвижными и неподвижными опорами на рисунках 5.28 и 5.29, соответственно.
Рисунок 5.28. Результаты для плит с подвижными опорами.
Рисунок 5.29. Результаты для плит с неподвижными опорами.
Как можно видеть, существуют существенные различия между поведением круглых пластин, описываемым теорией мелких оболочек, и поведением, описываемым общей нелинейной теорией оболочек.В последнем случае кривые деформации, в отличие от первого, зависят от отношения радиуса к толщине a / h , где a — начальный радиус пластины. Например, для фиксированного M k смещение центра пластины уменьшается, когда a / h увеличивается.
Здесь необходимо подчеркнуть, что круговой край пластины может значительно изменить свою величину во время деформации, поскольку теория негладких оболочек не ограничивает величины перемещений или вращений.Это означает, что нелинейное поведение пластины можно сравнить с поведением балки Эйлера в известной задаче Эйлера об упругости [см., Например, Тимошенко и Гир, 1963]. Обратите внимание, например, на поворот кривой деформации в случае подвижных кромок, показанный на рисунке 5.28.
Таким образом, если кривая деформации M k = M k (ξ) пластины является монотонной согласно теории пологих оболочек, она перестает быть монотонной при применении общей теории.Этот эффект малоизвестен. Вероятно, это является следствием того обстоятельства, что при больших значениях M k деформированная форма пластины имеет такой тип, что некоторые окружности, лежащие на средней поверхности в недеформированном состоянии, деформируются в окружности с большим радиусом. Деформированное состояние в таком случае принимает форму, которая чем-то напоминает «поварскую шляпу», которая у вершины шире, чем у основания. Обратите внимание, что это форма, которую нельзя описать теорией мелкой оболочки.
Сравнение численных результатов, полученных с помощью двух различных теорий для пластин, показывает, что для достижения одинакового центрального прогиба ξ «мелким» пластинам требуется на 20-40% больший краевой момент, чем «неглубоким» пластинам. Это означает, что «мелкие» пластины ведут себя так, как будто они жестче, чем «неглубокие» пластины.
Возвращаясь к проблеме шапки, можно сказать, что, вообще говоря, трудно охарактеризовать разницу между решениями, порождаемыми обеими теориями.Это можно увидеть, например, на рисунке 5.30, где три кривые равновесия ( M k (θ 0 ) в зависимости от ξ, показаны для крышки с подъемом вершины ξ¯ = 4 для трех различных величин. θ 0 : θ 0 = 1,8, 1,4 и 0,7 (крышка неподвижно шарнирно закреплена). Численные решения показывают, что кривые сходятся к результату, который мы ожидаем для мелкой оболочки при θ 0 <1/3. Как можно заключить из изложенного выше, проблема деформирования оболочек, описываемая более точной общей теорией, охватывающей глубокие (негладкие) оболочки, требует дальнейшего исследования.
Рисунок 5.30. Некоторые кривые равновесия для оболочек разной глубины.
b) Глубокие крышки, подверженные внешнему давлению
Эта проблема была исследована для гидростатического давления Валишвили [1976] с использованием основных уравнений, которые почти эквивалентны (1.25) и (1.26). Рассмотрены следующие шесть краевых условий:
- 1.
Шарнирно-подвижный в меридиональном направлении.
- 2.
Неподвижные шарнирные опоры.
- 3.
Зажимной, с возможностью перемещения в меридиональном направлении.
- 4.
Неподвижно зажимается.
- 5.
Навесной, подвижный в плоскости основания крышки.
- 6.
Зажимной, подвижный в плоскости основания крышки.
Результаты для упругого изотропного материала с v = 0,3 представлены в таблице. 5.1. Цифры в первом столбце соответствуют типу опоры, перечисленному выше, а второй столбец зарезервирован для угла основания θ 0 (запись S означает неглубокую оболочку).Результаты собраны в семи столбцах для различных значений параметра оболочки λ = [12 (1 — v 2 )] 1/4 θ 0 ( R / h ) 1 / 2 . Каждая запись представляет собой первую предельную нагрузку в реакции крышки с точки зрения безразмерного давления, определяемого как q = 31-v2q * R2 / 2Eh3, где q * — истинное давление q. Значения θ 0 даны в радианах. Отсутствие прыжка означает отсутствие предельной точки.Отсутствие записи означает, что результатов нет. Анализ данной таблицы показывает, что:
Таблица 5.1.
| Тип опоры | λ θ 0 | 4 | 6 | 8 | 10 | 12 | 18 | 30 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0,165 | 0,174 | 0,179 | 0,182 | 0,187 | 0,191 | |||||||||||
| 0.3 | 0,137 | 0,166 | — | 0,181 | 0,185 | — | — | |||||||||
| 0,5 | 0,137 | 0,168 | 0,114 | 906 9013 0,1680,114 906 | ||||||||||||
| 0,8 | — | — | — | 0,197 | — | — | — | |||||||||
| 2 | S | 0,663 | 0.743 | 0,789 | 0,752 | 0,853 | 0,898 | 0,940 | ||||||||
| 0,3 | 0,671 | — | 0,799 | — | 614614 0,799 | — | 614860 — | 0,860 — | — | 0,803 | — | 0,863 | — | — | ||
| 0,8 | 0,726 | — | — | — | 0.880 | — | — | |||||||||
| 3 | S | без скачка | 0,311 | 0,367 | 0,386 | 0,396 | 0,413 | 0,48 | 0,413 | 0,48 | 0,361 | 0,380 | 0,392 | — | — | |
| 0,5 | — | 0,292 | 0,350 | 0,370 | 0,383 | 0.402 | 0,417 | |||||||||
| 0,8 | — | — | 0,320 | — | — | — | — | |||||||||
| 4 | 0,9 613 | 906 0,9 | 0,959 | 0,920 | 0,951 | |||||||||||
| 0,3 | 0,573 | 0,983 | 1,117 | 0,836 | 0,965 | — | ||||||||||
| 0,588 | 1,004 | 1,139 | 0,825 | 0,966 | — | 0,951 | ||||||||||
| 0,8 | — | — | 0,96 — | 906|||||||||||||
| 5 | S | 0,137 | 0,165 | 0,174 | 0,179 | 0,182 | 0,187 | 0,191 | ||||||||
| 0,3 | — | 906— | 906 .192— | |||||||||||||
| 0,5 | 0,144 | 0,174 | — | 0,189 | — | 0.200 | 0,205 | |||||||||
| 0,814 — | — | — | — | — | — | |||||||||||
| 6 | S | без скачка | 0,311 | 0,367 | 0,386 | 0,396 | 0,413 | 0,425 | 83 | — | — | — | — | — | — | — |
| 0,5 | — | 0,336 | — | 6 0,413 | 0,413 | |||||||||||
| 0,8 | — | — | — | — | — | — | — |
- 1)
В пределах диапазона 9003 0,900 95 θ и λ ≤ 30 первые предельные нагрузки близки как в мелком, так и в неглубоком случаях.Различия между результатами для подвижных и неподвижных опор наиболее велики для опор, подвижных в меридиональном направлении, и они увеличиваются при увеличении θ 0 . λ здесь не играет важной роли, а это означает, что влияние θ 0 и ( R / h ) 1/2 имеет такой же порядок величины в этой задаче.
- 2)
Предельное давление q увеличивается при увеличении θ 0 или R / h , за исключением случая зажатой кромки, когда она перемещается в меридиональном направлении.В последнем случае предельное давление q уменьшается, когда θ 0 увеличивается при фиксированном λ.
Эти два основных свойства, наблюдаемые для случая нагружения гидростатическим давлением, очень хорошо соответствуют свойствам для предыдущего случая нагружения краевыми моментами.
Чтобы выявить влияние равномерно распределенной внешней нагрузки (собственного веса) по сравнению со случаем гидростатического давления, Валишвили [1976] также исследовал случай с первым типом нагрузки для λ = 10 и θ 0. = 0.5 для полностью прижатой и подвижной (в меридиональном направлении) откидной кромки. В обоих случаях результаты были примерно такими же, как и для сопоставимых случаев с гидростатическим давлением.
Насколько нам известно, вопрос о силах, зависящих от конфигурации, на устойчивость негладких сферических крышек серьезно не исследовался; но в статье Симитсеса и Коула [1968] показано, что поведение внешнего давления в трех различных случаях: (i) собственный вес в вертикальном направлении, (ii) давление, направленное перпендикулярно деформируемой поверхности (гидростатическое давление) , или (iii) распределение давления, которое остается направленным к центру — не оказывает заметного влияния на значение бифуркационной нагрузки продольного изгиба.Анализ был основан на уравнениях Сандерса [1963]. Можно категорически заявить, что для неглубоких сферических крышек эти различия в приложении нагрузки не очень значительны.
Проблема деформации сферических крышек под действием гидростатического давления рассматривалась также Гоцуляком, Гуляевым и Мельниченко [1974], Господариковым и Терентьевым [1977], а также Кобрицем и Терентьевым [1977] с результатами, которые хорошо согласуются с данными. в таблице 5.1. На рис. 5.31 мы представляем некоторые из графиков силовых перемещений, полученных Гоцуляком, Гуляевым и Мельниченко [1974], которые действительны для крышек с шарнирными опорами, которые могут перемещаться в меридиональном направлении.Эти результаты получены для следующих значений параметров: R / h = 250; E = 2,1 × l0 6 кгс / см 2 ; v = 0,3. Давление отложено по вертикальной оси в единицах q *, истинное давление в кгс / см 2 . Для θ 0 = 10 ° ≈ 0,17 рад. ξ¯≈3,8; λ = 2,69, кривая отклика практически совпадает с кривой, полученной по теории пологих оболочек [см. Валишвили, 1976; Шилкрут, Шевандронов, Морар, Максимов, 1969], а также рис. 2.10 для случая ξ¯ = −4 и M = 0.
Рисунок 5.31. Результаты, полученные Gotsuljak, Guliajev & amp; Мельниченко [1974].
Для θ 0 = 20 ° ≈ 0,35 рад. (λ = 5,34), как видно, нижняя предельная нагрузка все еще отрицательна, а разница между верхним и нижним предельными нагрузками заметно больше, чем в предыдущем случае. Но для θ 0 = 30 ° ≈ 0,52 рад. (λ ≈ 15) эта разница начинает уменьшаться, и при θ 0 = 40 ° ≈ 0,7 рад. (λ ≈ 20) предельные точки исчезают.Таким образом, в последнем случае замыкание в подпространстве осесимметричного класса деформаций невозможно. Это явление также описывается теорией мелких оболочек.
Исследования того же типа были выполнены Воровичем и Минаковой [1968a, b], которые использовали основные уравнения, которые можно поместить между уравнениями для мелкой оболочки и наиболее общими уравнениями. Результаты этих исследований представляют собой дополнительное подтверждение справедливости уравнений для мелкой оболочки при использовании в том диапазоне, для которого они получены.
Следует также отметить, что упрощенные уравнения Э. Рейсснера (см. Раздел 1.1) также дают результаты, которые сравниваются с результатами, полученными с помощью уравнений для мелкой оболочки.
Жесткость и прогиб: механические свойства материалов
В предыдущем посте мы рассмотрели кривую «напряжение-деформация» и ее связь с различными аспектами прочности материала — например, пределом прочности на растяжение, пределом текучести и пределом прочности на излом. И хотя мы часто думаем о материалах и конструкциях с точки зрения прочности, технически «прочность» — это мера того, какое усилие может выдержать материал до постоянной деформации или разрушения .Однако для правильной работы линейных направляющих, исполнительных механизмов и других компонентов движения обычно более важно знать, какое отклонение объект будет испытывать при данной нагрузке — другими словами, более важным свойством является жесткость объекта .
Жесткость материала указывает на его способность возвращаться к своей исходной форме или форме после снятия приложенной нагрузки.
Когда материал подвергается нагрузке — его собственный неподдерживаемый вес, внешняя приложенная нагрузка или и то, и другое — он испытывает напряжение и деформацию.Напряжение (σ) — это внутренняя сила, действующая на материал, вызванная нагрузкой, а деформация (ε) — это деформация материала, возникающая в результате этого напряжения. Отношение напряжения (силы на единицу площади) к деформации (деформации на единицу длины) называется модулем упругости, обозначаемым E.
.Отношение напряжения к деформации также называется модулем упругости материала, модулем упругости при растяжении или модулем Юнга.
Согласно закону Гука модуль упругости — это наклон линейного участка кривой зависимости напряжения от деформации вплоть до пропорционального предела (также называемого «пределом упругости»), обозначенного ниже точкой А.
Прочный материал выдерживает высокие нагрузки без остаточной деформации. Жесткий материал может выдерживать высокие нагрузки без упругой деформации. Другое свойство материала, которое иногда путают с прочностью или жесткостью, — твердость. Твердость определяет способность материала противостоять локальной (поверхностной) деформации, часто из-за трения или истирания.
В отличие от прочности, жесткость материала или модуль упругости является неотъемлемым свойством материала, и внешние факторы, такие как температура или обработка материала, очень мало влияют на его ценность.
Важно отметить, однако, что в практических приложениях жесткость конструкции зависит как от модуля упругости материала, так и от геометрии конструкции с точки зрения плоского момента инерции (также называемого вторым моментом площади). Планарный момент инерции I выражает распределение площади материала вокруг оси движения.
Произведение модуля упругости и плоского момента инерции иногда называют жесткостью материала при изгибе (EI).
В уравнениях для прогиба оба фактора жесткости — модуль упругости (E) и планарный момент инерции (I) — фигурируют в знаменателе. Это имеет смысл, потому что прогиб обратно пропорционален жесткости.
Полный прогиб балки с простой опорой при точечной нагрузке в центре. Обратите внимание, что модуль упругости (E) и планарный момент инерции (I) находятся в знаменателе обеих частей уравнения.Изображение предоставлено википедией.com
Другими словами, чем выше модуль упругости материала и чем выше планарный момент инерции объекта, тем меньше конструкция будет прогибаться при данной нагрузке.
Деформации и деформации
Темы
- Градиенты деформации
- Полярные разложения
- Матрицы вращения
- Отображение конечных элементов
- Мелкомасштабные штаммы
- Штаммы Грин и Альманси
- Основные штаммы и инварианты
- Гидростатические и девиаторные деформации
- Градиенты скорости
- Истинный штамм
- Производная материала
- Особые темы
Сводка
Этот раздел посвящен самой сути механики сплошной среды — работе с большими смещениями. и деформации предметов.Конечной целью часто является определение стресса, Прочность, усталость и свойства разрушения объекта или материала. Однако все эти цели начинаются с тем же первым шагом — количественная оценка перемещений и деформаций объекта.Смещения обычно не в центре внимания. Фактически, термин смещение твердого тела подразумевает это, потому что это относится к ситуации, когда объект движется, но не растягивается или деформировать каким-либо образом. Такое поведение не вызывает стресса.Однако это может серьезно усложняют более важную задачу определения деформаций.
Термин деформация относится к гораздо более интересной и сложной ситуации. изгиба, скручивания, растяжения материала и т. д. Все эти режимы деформации создают стресс. Задача состоит в том, чтобы отделить смещения от деформации, и количественно оценить каждую.
Получается, что деформации тесно связаны с градиентом поля смещения.Поскольку градиенты количественно определяют скорость изменения относительно позиция , имеет смысл, если смещения во всех точках на объекте одинаковы, значит он подвергается твердому телу смещения и нет никаких изменений смещения и, следовательно, нет напряжения, стрессы, переутомление и т. д.
Основное затруднение при выполнении вышеуказанных усилий — это … вращения. Повороты с жестким корпусом — это подмножество перемещений твердого тела , которые усложняют весь процесс и могут появиться (неправильно) как штаммы, если с ними не обращаться должным образом.
Спасибо
Спасибо, что посетили эту веб-страницу. Не стесняйся напишите мне, если у вас есть вопросы.Также рассмотрите возможность посещения указанного выше рекламодателя. Это помогает покрыть плату за хостинг веб-сайтов.
Боб МакГинти
[email protected]
Весь веб-сайт — $ 12,95
За 12,95 долларов вы получите два отформатированных PDF-файла. (первый для страниц размером 8,5 x 11 дюймов, второй для планшетов) всего Веб-сайт.Нажмите здесь чтобы увидеть образец страницы в каждом из двух форматов.
Strain Chapter — 4,99 доллара США
За 4,99 доллара вы получите два отформатированных PDF-файла. (первый для страниц размером 8,5 x 11 дюймов, второй для планшетов) из комплекта штамм главы.Нажмите здесь чтобы увидеть образец страницы в каждом из двух форматов.
Авторские права © 2012 Боб МакГинти
Справочная информация о деформационной способности, требуемой Еврокодом
В Еврокоде 8 нет явных требований к деформационной способности полной статьи 6.6.4 (3), элемент, когда полный элемент предназначен для использования в качестве рассеивающей зоны, как в случае с 6.6.4 (4), диагонали рам с концентрическими связями. Причина отсутствия явного требования 6.6.4 (5) заключается в том, что способность к удлинению стального материала, применяемого к длинным элементам 6.7.3, безусловно, обеспечивает способность к пластической деформации, необходимую в сейсмических условиях (см. 6.8.2 (10 ), обратите внимание на пример на стр. 148). Требования являются явными для структурных типологий, в которых 6.8.4 (2) диссипативные зоны достаточно локализованы.Они выражаются в единицах абсолютной прочности 7.7.4 (1), деформации, связанной с классом пластичности конструкции, выбранным проектировщиком: 7.8.3 (1),
• В стойких к моменту рамах пункт 6.6.4 (3) определяет минимальные требуемые значения способности пластмассового шарнира к вращению в балках или в соединениях на концах балок как 25 мрад для среднего класса пластичности (DCM) и 35 мрад для пластичности. Класс High (DCH).
• Для рам с эксцентриковыми связями в пункте 6.8.2 (10) указывается способность к деформации, обеспечиваемая пластичными связями.
• Для рам с распорками, концентрическими или эксцентрическими, в которых проектировщик намеревается добиться пластической деформации в соединении частичной прочности, пункты 6.7.3 (9) (a) и 6.8.4 (2) (a) в EN 1998 -1 указывают, что требуемая деформационная способность, обеспечиваемая локализованными диссипативными зонами, должна быть связана с вычисленной глобальной деформацией конструкции. Эта оценка способности к локальной деформации не требует очень высокой точности. Запрос на расчетное сейсмическое воздействие можно получить из анализа следующим образом, используя символы на рис.6.3:
Анализ конструкции дает относительное межэтажное смещение dT в ULS. Если расчет расчетного сейсмического воздействия является линейным на основе расчетного спектра реакции (т. Е. Упругого спектра с 5% -ным демпфированием, деленного на коэффициент поведения q), то значение относительного межэтажного смещения при расчетном сейсмическом воздействии составляет от анализ, умноженный на коэффициент поведения q (т.е. dv = qd] Cl): если анализ является нелинейным, смещение между этажами определяется непосредственно из анализа расчетного сейсмического воздействия.
— Тогда требуемое удлинение dl можно вычислить как d / = djcos a, где cos a = U (I2 + h3) xa. dl следует сравнить с суммой возможностей удлинения в соединениях на диагональных концах (при условии, что оба соединения активированы, что требует кривой поведения с деформационным упрочнением).
— Например, если djh = 3,5%, / = 6 м, h = 3 м; тогда cos a = 0,894, dT = 0,035 x 3 = 0,105 и dl = 0,117 м = 117 мм.
Примечание: если бы диагональ была местом для этого расширения, это означало бы: e = d // (/ 2 + h3) ia = 0.017 = 1,7%, что легко достигается диагональю.
Для стойких к моменту рам требования являются явными: например, пластиковый шарнир в стойкой к моменту раме DCH должен иметь вращательную способность 35 мрад или 3,5% в циклических пластических условиях, вызванных землетрясением. Эти требования к локальной пластичности могут быть приблизительно связаны с характеристиками общей пластичности конструкции: рис. 6.4 показывает, что моментная рама с соединением DCH должна выдерживать общий относительный дрейф около 3.5%.
Требуемая деформационная способность диссипативных зон была определена для обеспечения безопасности в наихудшей европейской ситуации: среднеэтажные здания в регионах с высокой сейсмичностью. Реальная деформационная способность, необходимая в диссипативных зонах, может быть меньше при других обстоятельствах, что может быть вычислено путем явной оценки dJH. Таким образом, требования кодекса по способности к локальной деформации в моментных рамах могут показаться чрезмерными. Однако эти требования имеют другое обоснование, которое является результатом огромных исследовательских усилий после наблюдения крайне плохого поведения моментных связей во время землетрясений в Нортридже (1994) и Кобе (1995).Эксперименты показали, что хорошо спроектированные и качественно изготовленные стальные компоненты могут без труда достичь целевых значений, упомянутых выше, в то время как плохие конструкции терпят неудачу.