Сила реакция опоры — куда она направлена и как ее вычилить
Сила реакции опоры — это сила, с которой опора действует на тело. Она направлена перпендикулярно поверхности, поэтому такую силу называют силой нормальной реакции. Обозначают ее символом N и измеряют в Ньютонах.
Тело находится на выпуклой или вогнутой поверхности
Рассмотрим рисунок 1. Тело находится на опоре и давит на нее своим весом. Опора реагирует на воздействие тела и отвечает ему силой \(\vec{N}\). Эта сила направлена перпендикулярно поверхности, вдоль вектора нормали, поэтому ее называют нормальной силой.
Примечания:
- Нормаль – значит, перпендикуляр.
- Искривленную, т.е., выпуклую, или вогнутую поверхность, можно считать частью сферы. Центр сферы – точка, она находится внутри сферы, от этой точки к поверхности сферы можно провести радиус.
\(\vec{N} \left( H \right) \) – сила, с которой опора действует на тело.
Рис. 1. Тело (шар) опирается на выпуклую – а) и вогнутую – б) поверхность.
Когда тело находится на выпуклой поверхности (рис. 1а), реакция направлена вдоль радиуса от центра сферы наружу, за ее пределы.
Если же тело находится на вогнутой части (рис. 1б) поверхности, реакция \(\vec{N}\) направлена по радиусу внутрь сферической поверхности к ее центру.
Тело опирается на поверхность в двух точках
На рисунках 2а и 2б изображено продолговатое тело (к примеру, стержень), опирающееся на поверхности двумя своими точками.
Рис. 2. Однородный стержень опирается на поверхность двумя точками, в каждой из точек сила реакции располагается перпендикулярно поверхности
В точках соприкосновения поверхность отвечает телу силой \(\vec{N}\) своей реакции. Видно, что в каждая сила реакции направлена перпендикулярно поверхности.
Cилы реакции \(\vec{N_{1}}\) и \(\vec{N_{2}}\) имеют различные направления и в общем случае не равны по модулю.
\[\large \vec{N_{1}} \ne \vec{N_{2}}\]
Примечание: Сила — это вектор.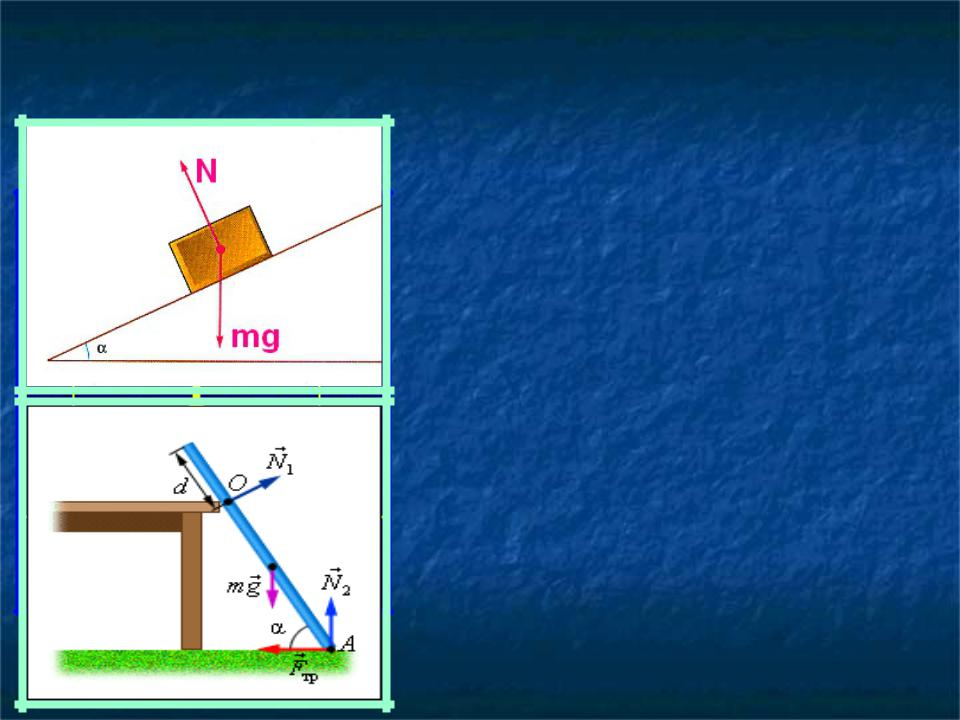 Между векторами можно ставить знак равенства, только, когда совпадают характеристики векторов.
Между векторами можно ставить знак равенства, только, когда совпадают характеристики векторов.
Как рассчитать силу нормальной реакции
Пусть тело давит на опору своим весом. В местах соприкосновения тела с опорой наблюдается упругая деформация. При этом опора стремится избавиться от возникшей деформации и вернуться в первоначальное состояние. Силы, с которыми опора упруго сопротивляется воздействию тела, имеют электромагнитную природу. Когда сближаются электронные оболочки атомов тела и опоры, между ними возникает сила отталкивания. Она и является силой реакции опоры на воздействие тела.
Примечание: Сила реакции \(\vec{N}\) распределяется по всей площади соприкосновения тела и опоры. Но для удобства ее обычно считают сосредоточенной силой. Ее изображают на границах соприкасающихся поверхностей исходящей из точки, расположенной под центром масс тела.
Для того, чтобы рассчитать силу реакции, нужно понимать законы Ньютона, уметь составлять силовые уравнения и знать, что такое равнодействующая.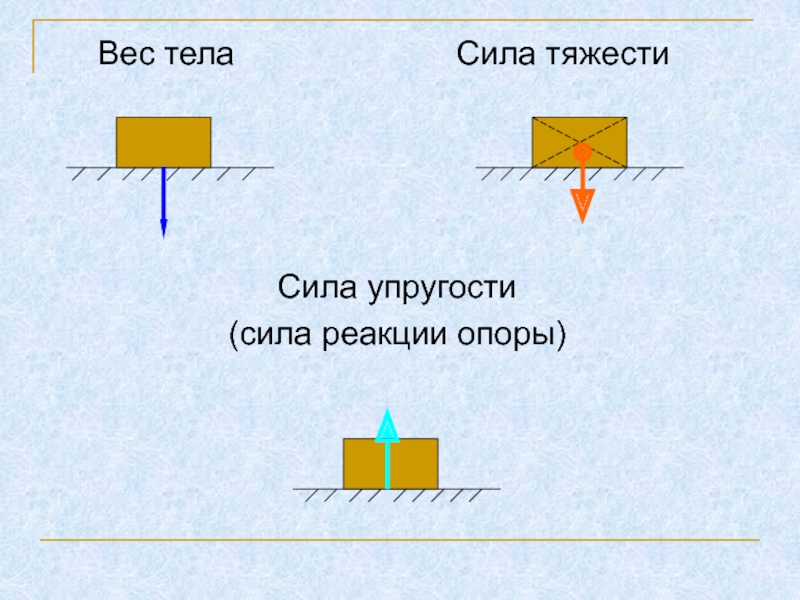
На рисунке 3 изображены тела, находящиеся на горизонтальной – а) и наклонной – б) поверхностях.
Рис. 3. Тело опирается на поверхность горизонтальную – а) и наклонную – б), составляя силовые уравнения для сил, расположенных перпендикулярно соприкасающимся поверхностям, рассчитывают силу реакции опоры
Рассмотрим подробнее рисунок 3а. Тело на горизонтальной поверхности находится в покое. Значит, выполняются условия равновесия тела.
По третьему закону Ньютона, сила, с которой тело действует на опору, равна по модулю весу тела и направлена противоположно весу.
\[\large \boxed{ N = m \cdot g }\]
\(m \vec{g} \left( H \right) \) – сила, с которой тело действует на опору;
\(\vec{N} \left( H \right) \) – сила, с которой опора отвечает телу;
Рисунок 3б иллюстрирует тело на наклонной поверхности. Перпендикулярно соприкасающимся поверхностям проведена ось Oy. Проекция силы \(m \vec{g}\) на ось — это \(mg_{y}\), она будет направлена противоположно реакции опоры \(\vec{N}\) и численно равна ей.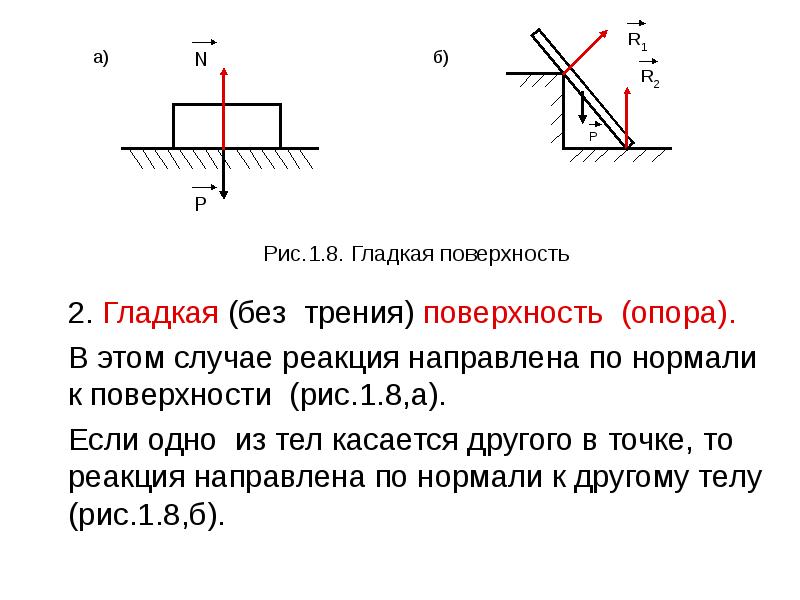
Примечание: Выражение «численно равна» нужно понимать, как «длины векторов равны».
\[\large \boxed{ N = m \cdot g \cdot cos(\alpha) }\]
\(\alpha \left(\text{рад} \right) \) – угол между силой \(mg\) и осью Oy.
Итоги
- Сила, с которой опора сопротивляется воздействию тела, называется силой реакции опоры, она имеет электромагнитную природу.
- Ее, как и любую силу, измеряют в Ньютонах, обозначают так: \(\vec{N}\).
- Реакция опоры направлена перпендикулярно поверхности, поэтому ее называют силой нормальной реакции.
- Сила \(\vec{N}\) распределена по площади соприкосновения, но для удобства ее обычно считают сосредоточенной силой. Ее изображают исходящей из точки, расположенной под центром масс тела на границах между поверхностями тела и опоры.
- Чтобы рассчитать силу реакции, нужно знать законы Ньютона, уметь составлять силовые уравнения и понимать, что такое равнодействующая.
Движение тела под действием нескольких сил по окружности
Из кодификатора по физике, 2020.
«1.2.4. Второй закон Ньютона: для материальной точки в ИСО
1.2.8. Сила упругости. Закон Гука:
1.2.9. Сила трения. Сухое трение. Сила трения скольжения:
Сила трения покоя:
Коэффициент трения.»
3. Определите значения проекций всех величин.
4. Решите полученные уравнения. При необходимости, исходя из физиче-ской природы, выразите силы через величины, от которых они зависят.
Задача 1. Мальчик массой 50 кг качается на качелях с длиной подвеса 4 м. Определите силу, с которой он давит на сиденье при прохождении нижнего положения со скоростью 6 м/с.
Решение. При использовании второго закона Ньютона, мы применяем силы, действующие на тело. Сила Fдавл – это сила, с которой мальчик давит на сиденье качелей. По третьему закону Ньютона, с такой же по величине силой, но противоположной по направлению, качели будут действовать на мальчика – это сила реакции опоры (N). Тогда
На мальчика действуют сила тяжести и сила реакции опоры (N).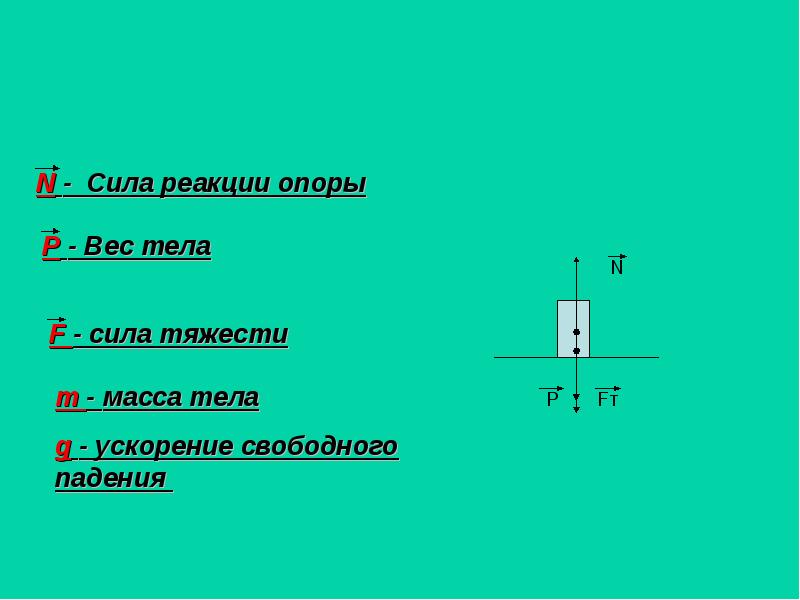 При движении по дуге окружности в нижней точке ускорение направлено к центру окружности (вверх). Ось Y направим вверх (рис. 1). Запишем второй закон Ньютона:
При движении по дуге окружности в нижней точке ускорение направлено к центру окружности (вверх). Ось Y направим вверх (рис. 1). Запишем второй закон Ньютона:
где , R=l. С учетом уравнений (1) и (2) получаем
Задача 2. На горизонтальном диске, который равномерно вращается вокруг вертикальной оси, проходящей через центр диска, лежит небольшая монета. Коэффициент трения между монетой и поверхностью диска равен 0,25. Угловая скорость вращения диска 5,0 рад/с. Определите максимальное расстояние (в см) между центром монеты и осью вращения, при котором монета не соскальзывает с диска.
Решение. На монету, лежащую на диске, действуют: сила тяжести и сила реакции опоры (N) — они направлены по вертикали (вдоль оси 0Y на рис. 2), сила трения (Fтр) — она направлена по горизонтали. Так как тело не движется, то сила трения — это сила трения покоя.
Монета вращается вместе с диском, поэтому у тела есть центростреми-тельное ускорение, направленное к центру диска. А так как на тело действует только одна горизонтальная сила (F тр), то она будет направлена в ту же сторону, что и ускорение, т.е. к центру дис-ка.
А так как на тело действует только одна горизонтальная сила (F тр), то она будет направлена в ту же сторону, что и ускорение, т.е. к центру дис-ка.
Оси координат направим так, как показано на рис. 2. Запишем второй закон Ньютона:
При любом расстоянии тело начнет скользить по диску к краю. Тогда
Задача 3. Груз, подвешенный на нити длиной 1,4 м, двигаясь равно-мерно, описывает в горизонтальной плоскости окружность (конический ма-ятник). Определите скорость, с которой движется груз, если во время его движения нить образует с вертикалью постоянный угол в 30º.
Решение. На груз действуют сила тяжести и сила натяжения подвеса (T). При равномерном движении по окружности возникает центростремительное ускорение, направленное горизонтально. Оси координат выберем так, как показано на рис. 3. Запишем второй закон Ньютона:
Задача 4. По выпуклому мосту, радиус кривизны которого 90 м, со скоростью 54 км/ч движется автомобиль массой 2,0 т.
Решение. Сила Fд — это сила, с которой автомобиль давит на дорогу. По третьему закону Ньютона, с такой же по величине силой, но противоположной по направле-нию, дорога будет действовать на автомобиль, а это сила реакции опоры (N). Тогда
На автомобиль действуют сила тяжести , сила реакции опоры (N), сила трения (Fтр) и сила тяги (F). При движении по дуге окружности возникает центростремительное ускорение, которое направлено к центру кривизны (перпендикулярно поверхно-сти). Ось 0Y направим вдоль ускорения, чтобы не учитывать тангенциальное ускорение (рис. 4).
Запишем второй закон Ньютона:
Автор Сакович А.Л.
Пример определения реакций шарнира и опоры. Пример решения
Задача
Однородный стержень AB (рисунок 1.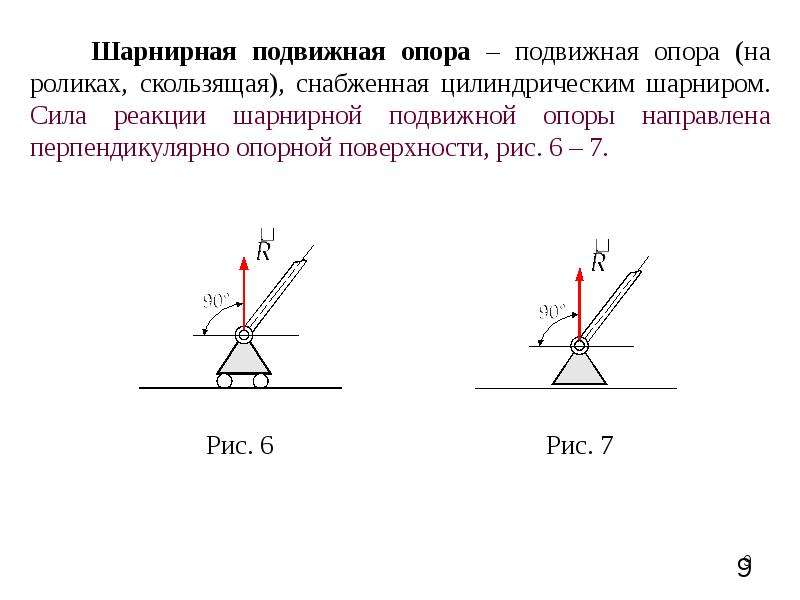 1) весом Q = 20 Н в точке A закреплен шарнирно, а в точке C свободно опирается на опору. На стержень AB действует пара сил с моментом M = 5 Нм, а к концу стержня B привязана веревка, перекинутая через блок D, на конце которой висит груз весом P = 5√2 Н.
1) весом Q = 20 Н в точке A закреплен шарнирно, а в точке C свободно опирается на опору. На стержень AB действует пара сил с моментом M = 5 Нм, а к концу стержня B привязана веревка, перекинутая через блок D, на конце которой висит груз весом P = 5√2 Н.
Определить реакции шарнира A и опоры C, если AC= 2BC= 40 см, ∠ABL= 45o.
Решение
Реакция Rc опоры C направлена перпендикулярно к стержню AB. Направление реакции RA шарнира A неизвестно; поэтому раскладываем эту реакцию на две составляющие xA и yA, направленные по осям координат, причем ось Ax направлена вдоль стержня AB, а ось Ay перпендикулярна к нему.
Реакция веревки BD приложена к стержню в точке B и направлена вдоль веревки. Так как натяжение веревки BLK во всех ее точках одинаково, то реакция веревки T равна по величине весу груза P, т.е. T=P.
Так как натяжение веревки BLK во всех ее точках одинаково, то реакция веревки T равна по величине весу груза P, т.е. T=P.
Рисунок 1.1
Составим три уравнения равновесия, приравнивая нулю сумму проекций всех сил на координатные оси и сумму моментов этих сил относительно начала координат:
ΣFkx= 0, xA — Tcos45o=0,
ΣFky= 0, yA + Rc— Q — Tsin45o=0,
ΣMA(Fk) =0, Rc∙AC — Q∙AE — T∙ABsin45o— M =0.
Правила знаков для сил и моментов.
Из первого уравнения находим
xA= Tcos45o= P√2/2 = 5 Н.
Из третьего уравнения, в котором
AC =40 см, AB = AC + CB = 60 см, AE = AB/2 = 30 см,
находим
Rc= (60∙Tsin45o+ 30∙Q + M)/40 =
=((3/4)√2∙P + (3/4)Q + M)/40 = 35 Н.
Подставив это значение во второе уравнение, получим
yA= — Rc+ Q + Psin45o=
= Q + P√2/2 — ((3/4)√2P — (3/4)Q — M)/40 = -10 Н.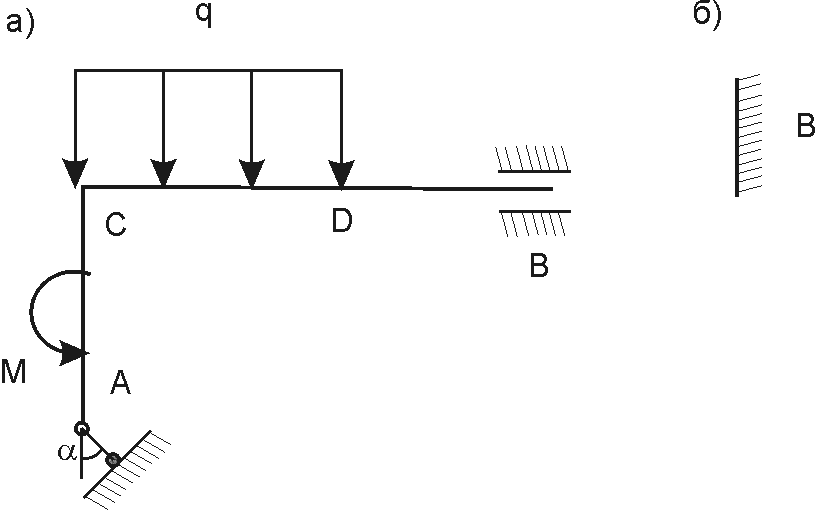
Здесь знак «минус» указывает на то, что в действительности реакция yA направлена в противоположную сторону, т.е. вниз.
Другие примеры решения задач >>
ЕГЭ по физике – силы трения. Отличия трения покоя и скольжения.
Привет! Меня зовут Егор Блинов. Я – репетитор к ЕГЭ по физике. А ещё – преподаватель в МФТИ и преподаватель онлайн-школы Grand Exam. В этой статье мы разберемся с тем, что такое сила трения и какие виды силы трения существуют. А главное – как их различать между собой.
Если не хочется читать – можно посмотреть материал в видео:
Сколько сил трения в ЕГЭ по физике? Явление застоя и скрипка!
Watch this video on YouTube
Начнем разговор с того, что есть полная сила реакции опоры R.
R – это сила, с которой поверхность реагирует на тело, которое до неё дотрагивается. Для бруска и для стержня, опирающихся на поверхность, сила полной реакции опоры выглядит так, как показано на рисунке. Вы заметили, что очень неудобно работать с такой силой. Потому что мы точно не знаем – куда она направлена. Что же мы сделаем? Мы разложим её на две перпендикулярных составляющих.
Вы заметили, что очень неудобно работать с такой силой. Потому что мы точно не знаем – куда она направлена. Что же мы сделаем? Мы разложим её на две перпендикулярных составляющих.
Одна из них будет N – сила нормальной реакции опоры. Эта сила будет перпендикулярна поверхности. Еще будет сила трения – как раз о которой мы сегодня говорим. Сила трения – это составляющая силы R, которая направлена вдоль поверхности. Далее мы посмотрим, как между собой сила трения и сила N связаны.
Разберемся с первым видом силы трения – силой трения покоя – на самом простом примере. Брусочек покоится на поверхности. Мы расставили силы нормальной реакции опоры: силы тяжести, сила F, с который мы тянем этот брусок, и сила трения, которая нам мешает сдвинуть этот брусок с места. Пока брусок покоится относительно поверхности, до того, как он начал движение, на брусок действует сила трения покоя.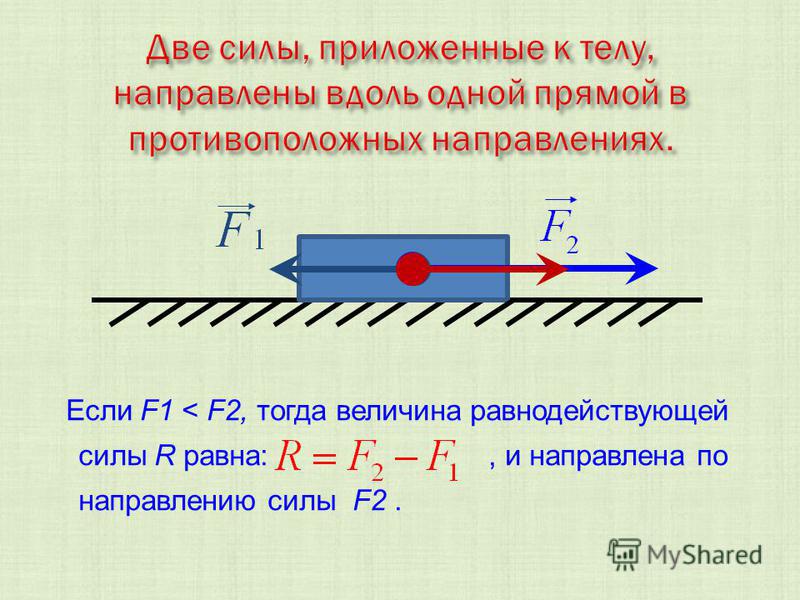 Если мы нарисуем график силы трения от силы F, которую мы прикладываем (тянем за веревочку), то он будет выглядеть вот так:
Если мы нарисуем график силы трения от силы F, которую мы прикладываем (тянем за веревочку), то он будет выглядеть вот так:
График похож на график прямой пропорциональности y=x из математики. То есть у этого графика тангенс угла наклона равен единице. Потому что x и y равны между собой. Если я увеличиваю силу, с которой я тяну брусок, то сила трения покоя тоже увеличивается и компенсирует наше дополнительное усилие. Поэтому наш грузик остается в покое.
Следующий случай – сила трения скольжения – это значит, что брусок начал скользить по поверхности. Сила трения перестает расти и достигает своего максимального значения . – это некоторый коэффициент, о котором мы позже поговорим. N – это как раз сила нормальной реакции опоры.
На графике видно, что до предела сила трения возрастала, а потом стала постоянной. Когда есть скольжение, и брусок движется относительно поверхности – сила трения скольжения, которая равна . Примерно с постоянной скоростью я тяну грузик, и примерно одинаковой получается сила трения скольжения.
Примерно с постоянной скоростью я тяну грузик, и примерно одинаковой получается сила трения скольжения.
Теперь разберемся, что такое . – это некоторый постоянный коэффициент, который будет характеризовать поверхности, которые трутся друг о друга. Например, для пары “металл-металл” он будет свой, для пары “металл-дерево” он будет уже другим. Он зависит только от материала и шероховатости трущихся поверхностей. В задачах ЕГЭ он не зависит ни от площади соприкосновения, ни от относительной скорости поверхностей.
В задачках находится в пределах от нуля до единицы. Если ноль, значит вообще нет трения, если единица – трения очень большое. В реальной жизни может быть и больше единицы – может быть, тело просто прилипло к поверхности.
Чтобы получить конспект всего ролика или конспекты по другим темам физики – просто напиши моему чат-боту слово конспект, и он тебе все пришлет.
Давайте все сведем в одну табличку и подытожим.
У нас есть силы трения покоя и скольжения.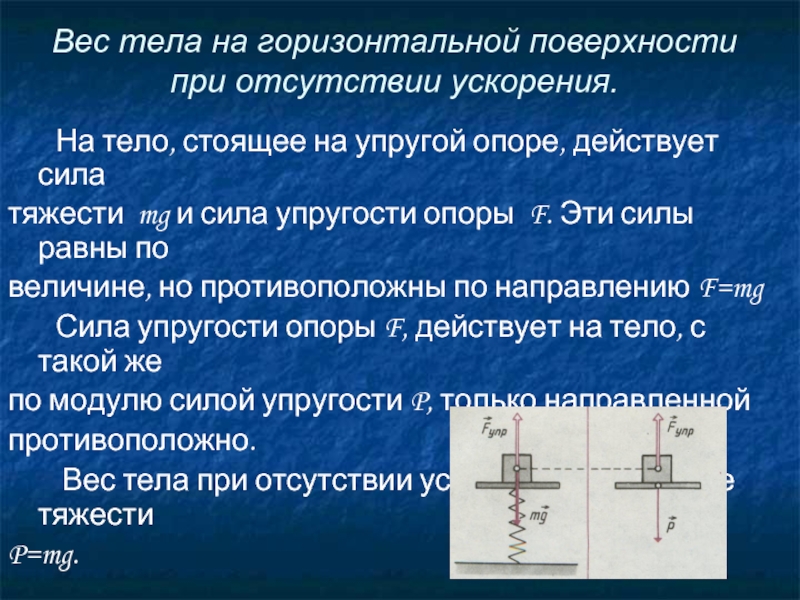 Основной критерий, по которому мы будем различать их: поверхности тела движутся относительно друг друга или еще нет. Если не движутся – значит, эта сила трения покоя; если движется – значит, сила трения скольжения. Как мы будем находить в задачах эти силы?
Основной критерий, по которому мы будем различать их: поверхности тела движутся относительно друг друга или еще нет. Если не движутся – значит, эта сила трения покоя; если движется – значит, сила трения скольжения. Как мы будем находить в задачах эти силы?
Если сила трения покоя – мы записываем Второй закон Ньютона и полагаем, что ускорение тела равна нулю (ведь оно покоится), и из Второго закона Ньютона можем найти эту силу трения. В случает трения покоя нельзя писать , потому что формула применяется, когда есть скольжение. Сила трения покоя ограничена величиной – как вы помните из графика, сила трения покоя не может превышать этого значения. При этом направлена сила трения покоя будет против возможного движения тела. То есть против того направления, в котором двигалась бы тело, если бы силы трения не было.
Мы тянем грузик внешними силами F1 и F2 (это вид сверху), а сила трения препятствует. Так как это сила трения покоя, то грузик покоится, и из второго закона Ньютона сила трения равна сумме внешних сил. Но и поэтому она как раз и направлена противоположно тому направлению, в котором двигался этот грузик, если бы силы трения вообще не было бы.
Но и поэтому она как раз и направлена противоположно тому направлению, в котором двигался этот грузик, если бы силы трения вообще не было бы.
А что по поводу силы трения скольжения – здесь уже имеет место движение. Модуль суммы сил F1 и F2 может быть больше, чем сила трения – тогда будет движение с ускорением.
Это основные моменты, которые мы должны знать, чтобы уметь различать эти силы.
Давайте пофантазируем, чем может быть полезно трение покоя и чем вредно. И то же самое для силы трения скольжения.
Например сила трения покоя полезна тем, что гвоздь не вылетает из отверстия, если мы его туда забили. Сила трения скольжения хороша тем, что можно на дороге затормозить “юзом” – если даже заблокировались колеса, все равно тормозим. Без силы трения скольжения было бы как-то страшно улететь в бесконечность.
Вредна сила трения покоя, потому что тяжело двигать мебель. А сила трения скольжения вредна тем, что происходит износ и нагрев подвижных деталей.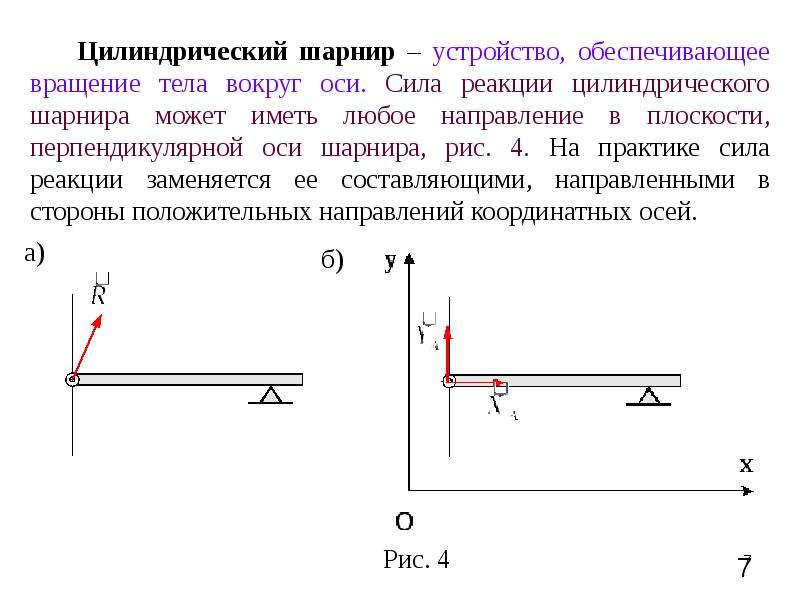
Напишите, пожалуйста, в комментарии, чем они полезны и чем вредны, и каким был бы наш мир, если бы не было никаких сил трения. Очень интересно узнать и дополнить свою презентацию вашими версиями.
А теперь давайте поговорим о явлении застоя. Обычно оно не учитывается в задачах ЕГЭ, и рассматривается “идеальный” график, хотя в реальности там может быть вот такой “клювик” – то есть превышение силы трения покоя над силой трения скольжения. Так мы определим явление застоя.
В видео мы можем обнаружить это явление экспериментально – пытаясь вывести грузик из состояния покоя, мы увеличиваем прикладываемую силу почти до 0.5 Н, но при движении, когда грузик срывается с места, устанавливается сила поменьше.
Но самое необычное, что из-за этого явления у нас скрипит дверь, и скрипка издаёт свой звук.
Наверное, вы замечали, что особенно сильно дверь скрипит, когда мы медленно её открываем. То есть сначала играет роль сила трения покоя, которая все больше увеличивается, а потом происходит “срыв” по клювику вниз, потом опять появляется какое-то движение, потом за счет силы трения это движение замедляется и прекращается, сила трения скольжения опять переходит в силу трения покоя, которая в свою очередь опять начинает нарастать.
И вот эти “срывы” заставляют дверь колебаться и издавать звук высокой частоты. Покой-движение-покой-движение – это чередование порождает звуковые колебания, которые нам обычно так противны. Но есть и плюс – благодаря этому явлению мы можем ходить на концерты классической
музыки со скрипкой.
Время экспериментов!
Поставим задачу: экспериментально определить коэффициент трения между кареткой (тележкой с грузиками) и деревянной поверхностью стола. Сначала найдем силу тяжести, которая действует на грузик:
Нарисовали рисунок, расставили силы, ввели оси координат, записали Второй закон Ньютона в проекции на обе оси. Если сила направлена вдоль оси – значит, учитываем её в уравнении с плюсом. Если против оси – значит, с минусом. Сила тяжести равна показаниям динамометра – 0,9Н.
Для случая, когда мы тащим грузик по поверхности, имеет место уже знакомая вам расстановка сил, мы рисовали её чуть раньше.
Запишем Второй закон Ньютона в проекциях на оси х и у.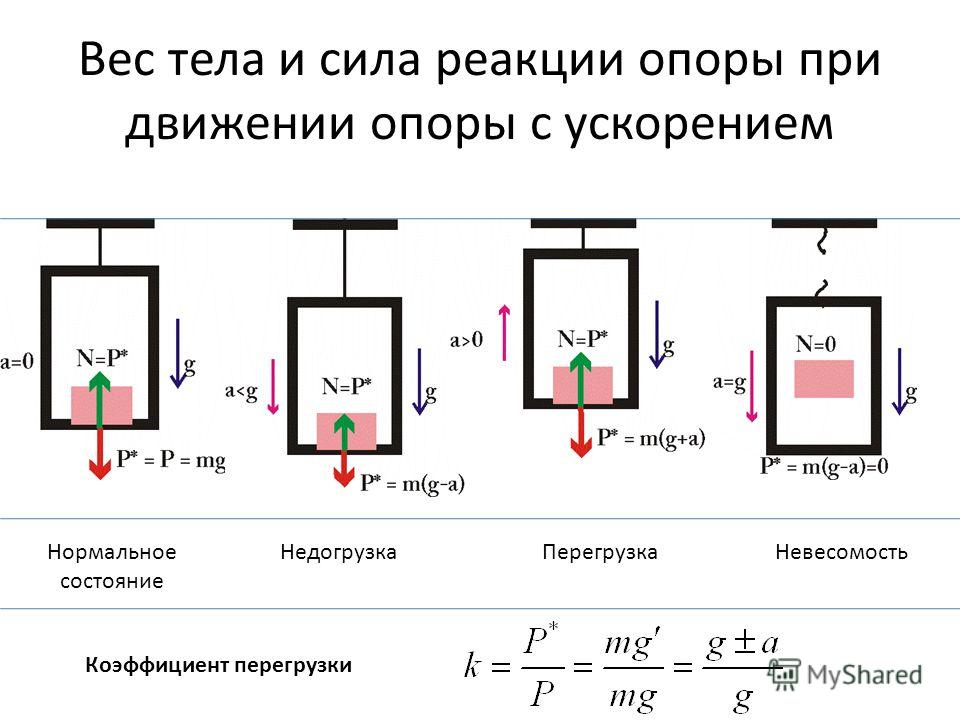 Получаем, что сила F, которую мы прикладываем к грузу, равна силе трения, которая рассчитывается по формуле.
Получаем, что сила F, которую мы прикладываем к грузу, равна силе трения, которая рассчитывается по формуле.
На видео видно, что я примерно с постоянной скоростью тяну грузик, и примерно одинаковой получается сила трения скольжения.
Отсюда выражаем . Осталось подставить числа и подсчитать ответ: .
До встречи на занятиях! Егор Блинов.
****************************************************
Ищу учеников на подготовку к ЕГЭ по физике. Индивидуальные дистанционные занятия и мини-группы. Подробная информация – в профиле.
А ещё на новогодних каникулах я буду проводить 6-дневный онлайн-интенсив по электродинамике на ЕГЭ. Длинные вебинары, домашка, доступ к консультациям до конца года. Цена при записи до НГ- 1490р. Записаться можно тут, а по промокоду КурсАгентЕгор можно получить скидку 200р.
****************************************************
В НГАСУ (Сибстрин) прошло заседание Попечительского совета 20 мая 2021 года в Новосибирском государственном архитектурно-строительном университете (Сибстрин) состоялось очередное заседание Попечительского совета вуза. Члены совета и руководство НГАСУ (Сибстрин) обсудили основные результаты работы за 2020 год и наметили направления дальнейшего сотрудничества.
Заседание попечителей открыл ректор университета Ю.Л. Сколубович. В своем выступлении он поблагодарил членов совета за ту значительную помощь и поддержку, которую они оказывают в это непростое время, и рассказал о ходе выполнения плана работы Попечительского совета в 2020/2021 учебном году.
В 2020 году Попечительский совет принял участие в самых разных сферах жизнедеятельности НГАСУ (Сибстрин): учебной деятельности, науке, укреплении материально-технической базы, проведении студенческих практик. С докладами выступили проректор по учебной и воспитательной работе М.Н. Шумкова Члены совета и руководство НГАСУ (Сибстрин) обсудили основные результаты работы за 2020 год и наметили направления дальнейшего сотрудничества.
Заседание попечителей открыл ректор университета Ю.Л. Сколубович. В своем выступлении он поблагодарил членов совета за ту значительную помощь и поддержку, которую они оказывают в это непростое время, и рассказал о ходе выполнения плана работы Попечительского совета в 2020/2021 учебном году.
В 2020 году Попечительский совет принял участие в самых разных сферах жизнедеятельности НГАСУ (Сибстрин): учебной деятельности, науке, укреплении материально-технической базы, проведении студенческих практик. С докладами выступили проректор по учебной и воспитательной работе М.Н. Шумкова |
НГАСУ (Сибстрин) отпраздновал свой 91-й день рождения 20 мая 2021 года преподаватели, сотрудники, студенты и партнеры отметили 91-й день рождения Новосибирского государственного архитектурно-строительного университета (Сибстрин). За эти годы вуз прошел большой и яркий путь развития и подготовил более 50 тысяч специалистов для отрасли. Сегодня Сибстрин – один из ведущих строительных вузов СФО и России.
Очередной день рождения Сибстрин отметил под знаком экологии. Данная тема выбрана не случайно, потому что вуз стал первым, кто начал готовить экологов для Сибири, а сейчас, благодаря студентам-экоактивистам, входит в десятку «Зеленых вузов» России. У нас открыта уникальная кафедра ЮНЕСКО «Экологически безопасные технологии природообустройства и водопользования», которых всего лишь 8 в России и 32 в мире, и лаборатория ЮНЕСКО международного уровня. Об этом рассказал ректор Юрий Леонидович… За эти годы вуз прошел большой и яркий путь развития и подготовил более 50 тысяч специалистов для отрасли. Сегодня Сибстрин – один из ведущих строительных вузов СФО и России.
Очередной день рождения Сибстрин отметил под знаком экологии. Данная тема выбрана не случайно, потому что вуз стал первым, кто начал готовить экологов для Сибири, а сейчас, благодаря студентам-экоактивистам, входит в десятку «Зеленых вузов» России. У нас открыта уникальная кафедра ЮНЕСКО «Экологически безопасные технологии природообустройства и водопользования», которых всего лишь 8 в России и 32 в мире, и лаборатория ЮНЕСКО международного уровня. Об этом рассказал ректор Юрий Леонидович… |
Объявление о конкурсе на замещение вакантных должностей профессорско-преподавательского состава Квалификационные требования по должностям педагогических работников, относящихся к профессорско-преподавательскому составу (в соответствии с приказом Минздравсоцразвития РФ от 11.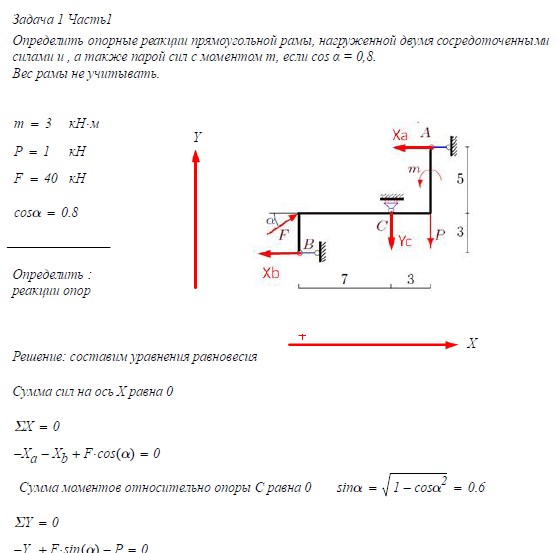 01.2011 № 1н)
Ассистент
Требования к квалификации. Высшее профессиональное образование и стаж работы в образовательном учреждении не менее 1 года, при наличии послевузовского профессионального образования (аспирантура, ординатура, адъюнктура) или ученой степени кандидата наук — без предъявления требований к стажу работы
Преподаватель
Требования к квалификации. Высшее профессиональное образование и стаж работы в образовательном учреждении не менее 1 года, при наличии послевузовского … 01.2011 № 1н)
Ассистент
Требования к квалификации. Высшее профессиональное образование и стаж работы в образовательном учреждении не менее 1 года, при наличии послевузовского профессионального образования (аспирантура, ординатура, адъюнктура) или ученой степени кандидата наук — без предъявления требований к стажу работы
Преподаватель
Требования к квалификации. Высшее профессиональное образование и стаж работы в образовательном учреждении не менее 1 года, при наличии послевузовского … |
Приглашаем на «Открытый урок» в рамках федерального просветительского марафона «Новое знание» С 20 по 22 мая 2021 года российское общество «Знание» проводит просветительский марафон «Новое знание». Основная цель марафона – показать достижения России в самых различных областях, познакомить участников с выдающимися представителями госуправления, культуры и искусства, науки, бизнеса и спорта. Планируется, что общая аудитория участников с учетом онлайн — трансляции составит порядка 5 млн. человек. 21 мая на сайте российского общества «Знание» будет проведен «открытый урок» для студентов образовательных организаций высшего образования. Программа открытого урока: 9:45 – 10:00 Приветственное слово министра науки и высшего образования Российской Федерации – Валерия Фалькова; 10:00 – 11:00 Выступит Иван Ященко – известный российский математик… |
Проецирование сил. Движение по наклонной плоскости
Проецирование сил. Движение по наклонной плоскости
I и II закон Ньютона.
Ввод и направление осей.
Неколлинеарные силы.
Проецирование сил на оси.
Решение систем уравнений.
Самые типовые задачи по динамике
Начнем с I и II законов Ньютона.
Откроем учебник физики и прочтем. I закон Ньютона: существуют такие инерциальные системы отсчета в которых… Закроем такой учебник, я тоже не понимаю. Ладно шучу, понимаю, но объясню проще.
I закон Ньютона: если тело стоит на месте либо движется равномерно (без ускорения), сумма действующих на него сил равна нулю.
Вывод: Если тело движется с постоянной скоростью или стоит на месте векторная сумма сил будет ноль.
II закон Ньютона: если тело движется равноускоренно или равнозамедленно (с ускорением), сумма сил, действующих на него, равна произведению массы на ускорение.
Вывод: Если тело двигается с изменяющейся скоростью, то векторная сумма сил, которые как-то влияют на это тело ( сила тяги, сила трения, сила сопротивления воздуха), равна массе этого тело умножить на ускорение.
При этом одно и то же тело чаще всего движется по-разному (равномерно или с ускорением) в разных осях. Рассмотрим именно такой пример.
Задача 1. Определите коэффициент трения шин автомобиля массой 600 кг, если сила тяги двигателя 4500 Н вызывает ускорение 5 м/с².
Обязательно в таких задачах делать рисунок, и показывать силы, которые дествуют на машину:
На Ось Х: движение с ускорением
На Ось Y: нет движения (здесь координата, как была ноль так и останется, машина не поднимает в горы или спускается вниз)
Те силы, направление которых совпадает с направлением осей, будут с плюсом, в противоположном случае — с минусом.
По оси X: сила тяги направлена вправо, так же как и ось X, ускорение так же направлено вправо.
Fтр = μN, где N — сила реакции опоры. На оси Y: N = mg, тогда в данной задаче Fтр = μmg.
Получаем, что:
Коэффициент трения — безразмерная величина. Следовательно, единиц измерения нет.
Ответ: 0,25
Задача 2. Груз массой 5кг, привязанный к невесомой нерастяжимой нити, поднимают вверх с ускорением 3м/с². Определите силу натяжения нити.
Сделаем рисунок, покажем силы, которые дествуют на груз
T — сила натяжения нити
На ось X: нет сил
Разберемся с направлением сил на ось Y:
Выразим T (силу натяжения) и подставим числительные значения:
Ответ: 65 Н
Самое главное не запутаться с направлением сил (по оси или против), все остальное сделает калькулятор или всеми любимый столбик.
Далеко не всегда все силы, действующие на тело, направлены вдоль осей.
Простой пример: мальчик тянет санки
Если мы так же построим оси X и Y, то сила натяжения (тяги) не будет лежать ни на одной из осей.
Чтобы спроецировать силу тяги на оси, вспомним прямоугольный треугольник.
Отношение противолежащего катета к гипотенузе — это синус.
Отношение прилежащего катета к гипотенузе — это косинус.
Сила тяги на ось Y — отрезок (вектор) BC.
Сила тяги на ось X — отрезок (вектор) AC.
Если это непонятно, посмотрите задачу №4.
Чем длинее будет верека и, соответсвенно, меньше угол α, тем проще будет тянуть санки. Идеальный вариант, когда веревка параллельна земле, ведь сила, которая действуют на ось X— это Fнcosα. При каком угле косинус максимален? Чем больше будет этот катет, тем сильнее горизонтальная сила.
Задача 3. Брусок подвешен на двух нитях. Сила натяжения первой составляет 34 Н, второй — 21Н, θ1 = 45°, θ2 = 60°. Найдите массу бруска.
Введем оси и спроецируем силы:
Получаем два прямоугольных треугольника. Гипотенузы AB и KL — силы натяжения. LM и BC — проекции на ось X, AC и KM — на ось Y.
Ответ: 4,22 кг
Задача 4. Брусок массой 5 кг (масса в этой задаче не нужна, но, чтобы в уравнениях все было известно, возьмем конкретное значение) соскальзывает с плоскости, которая наклонена под углом 45°, с коэффициентом трения μ = 0,1. Найдите ускорение движения бруска?
Когда же есть наклонная плоскость, оси (X и Y) лучше всего направить по направлению движения тела. Некоторые силы в данном случае ( здесь это mg) не будут лежать ни на одной из осей. Эту силу нужно спроецировать, чтобы она имела такое же направление, как и взятые оси.
Всегда ΔABC подобен ΔKOM в таких задачах (по прямому углу и углу наклона плоскости).
Рассмотрим поподробнее ΔKOM:
Получим, что KO лежит на оси Y, и проекция mg на ось Y будет с косинусом. А вектор MK коллинеарен (параллелен) оси X, проекция mg на ось X будет с синусом, и вектор МК направлен против оси X (то есть будет с минусом).
Не забываем, что, если направления оси и силы не совпадают, ее нужно взять с минусом!
Из оси Y выражаем N и подставляем в уравнение оси X, находим ускорение:
Ответ: 6,36 м/с²
Как видно, массу в числителе можно вынести за скобки и сократить со знаменаталем. Тогда знать ее не обязательно, получить ответ реально и без нее.
Да-да, в идеальных условиях (когда нет силы сопротивления воздуха и т.п.), что перо, что гиря скатятся (упадут) за одно и тоже время.
Задача 5. Автобус съезжает с горки под уклоном 60° с ускорением 8 м/с² и с силой тяги 8 кН. Коэффициент трения шин об асфальт равен 0,4. Найдите массу автобуса.
Сделаем рисунок с силами:
Введем оси X и Y. Спроецируем mg на оси:
Запишем второй закон Ньютона на X и Y:
Ответ: 6000 кг
Задача 6. Поезд движется по закруглению радиуса 800 м со скоростью 72 км/ч. Определить, на сколько внешний рельс должен быть выше внутреннего. Расстояние между рельсами 1,5 м.
Самое сложное — понять, какие силы куда действуют, и как угол влияет на них.
Вспомни, когда едешь по кругу на машине или в автобусе, куда тебя выталкивает? Для этого и нужен наклон, чтобы поезд не упал набок!
Угол α задает отношение разницы высоты рельсов к расстоянию между ними (если бы рельсы находились горизонтально)
Запишем какие силы действуют на оси:
Ускорение в данной задачи центростремительное!
Поделим одно уравнение на другое:
Тангенс — это отношение противолежащего катета к прилежащему:
Ответ: 7,5 см
Как мы выяснили, решение подобных задач сводится к расстановке направлений сил, проецированию их на оси и к решению систем уравнений, почти сущий пустяк.
В качестве закрепления материала решите несколько похожих задач с подсказками и ответами.
Будь в курсе новых статеек, видео и легкого технического юмора.
Технологическая карта урока физики по теме «Сила реакции опоры. Вес» по ФГОС
Технологическая карта урока физики по теме «Сила реакции опоры. Вес» по ФГОС
Класс: 7 класс
УМК: Грачев А.В., Погожев В.А., Селиверстов А.В.
Тема: Сила реакции опоры. Вес
Тип урока: урок получения новых знаний с элементами обобщения ранее изученного.
Технология построения урока: проблемное обучение.
Цель урока: сформировать представление о силе веса тела и силе нормальной реакции опоры.
Задачи
Обучающие: познакомить учащихся с новыми понятиями: вес тела, сила нормальной реакции опоры, перегрузка, невесомость, коэффициент перегрузки, с графическим изображением веса тела и силы реакции опоры, описать явления перегрузки и невесомости; применять алгоритм решения задач при расчете силы нормальной реакции опоры и веса тела.
Развивающие: развитие навыков логического мышления, развитие умения высказывать и обосновывать свою точку зрения, умения делать выводы
Воспитательные: убеждать учащихся в познаваемости окружающего мира; формировать интерес к познанию законов природы и их применению; создавать позитивное отношение к предмету; воспитывать чувство уважения к собеседнику.
Планируемый результат:
Личностные УУД:
формирование ответственного отношения к учению, готовности к саморазвитию и самообразованию;
формирование коммуникативной компетентности;
формирование устойчивой учебно-познавательной мотивации и интереса к учению.
Регулятивные УУД:
осуществление регулятивных действий самоконтроля и самооценки в процессе урока;
постановка учебной задачи на основе известного и неизвестного;
формирование умения самостоятельно контролировать своё время и управлять им.
Коммуникативные УУД:
организация и планирование учебного сотрудничества с учителем и сверстниками,
использование адекватных языковых средств для отображения своих чувств, мыслей, мотивов и потребностей.
построение устных высказываний, в соответствии с поставленной коммуникативной задачей.
Познавательные УУД:
построение логических рассуждений, включающих установление причинно-следственных связей;
формулирование проблемной задачи и поиск наиболее эффективных средств для ее решения.
Этапы урока, предполагаемый результат | Время, мин | Деятельность учителя | Деятельность учащихся | Формирование УУД |
Организационный момент | 1 | Приветствует учеников. Проверяет готовность учеников к уроку | Приветствуют учителя, проверяют свои рабочие места | |
Актуализация знаний и фиксация затруднений в деятельности | 8 | Готовит учащихся к работе на уроке. Показывает демонстрации и формулирует вопросы, актуализирующие опорные знания: Демонстрация 1. Мячик, выпущенный из рук, падает вниз. Как движется мячик? Как направлено ускорение, с которым движется мячик? Почему он движется ускоренно? Сформулируйте второй закон Ньютона. Какая сила действует на мячик? Как направлена эта сила? По какой формуле ее можно рассчитать? Демонстрация 2. Тело подвешено на пружине. Почему оно находится в покое? Какие силы приложены к телу? Охарактеризуйте силу упругости, действующую на тело со стороны пружины (направление, величина). А что такое деформация? | Ученики отвечают на вопросы. | Регулятивные: самоконтроль и структурирование собственных знаний Познавательные: развитие умения проводить анализ и делать вывод, установление причинно-следственных связей Личностные: Самооценка имеющихся знаний Коммуникативные: развитие умения грамотно выражать свои мысли |
Постановка проблемных вопросов и выдвижение гипотез | 3 | Учитель предлагает ответить на следующие вопросы: 1. Почему книга, лежащая на столе, не движется ускоренно? С какими телами взаимодействует книга, лежащая на столе? Как называются силы, с которыми эти тела действуют на книгу? А с какой силой книга действует на стол? 2. Почему ненагруженная пружина, висящая на штативе, при присоединении к ней тела начинает деформироваться? | Отвечают на вопросы. Высказывают предположения, что на книгу действует сила упругости со стороны стола, т.к. она находится в покое относительно ИСО стола, а на пружину действует сила со стороны подвешенного тела. Формулируют тему урока, цель и задачи. Записывают тему урока в тетради. | Коммуникативные: развитие умения грамотно выражать свои мысли Познавательные: выдвижение гипотез и их обоснование Личностные: формирование познавательного интереса и понимание практической значимости выполняемой работы Регулятивные: постановка учебной задачи на основе известного и неизвестного. |
Решение проблемы | 20 | I. Учитель строит разъяснение, что сила упругости, действующая со стороны стола на книгу, называется силой нормальной реакции опоры, и характеризует ее по плану: 1. На какое тело действует сила? 2. Какое тело действует с этой силой? 3. Чему равен модуль силы? 4. Куда направлена сила? Обращает внимание, что ее величину можно определить из второго закона Ньютона для тела. II. Определение модуля силы веса тела, стоящего на опоре, в случае ускоренного движения опоры вверх. Пусть тело массой m лежит на полу лифта, ускорение которого направлено вертикально вверх. Определить вес тела. Учитель решает эту задачу на доске, приходит к ответу, что вес тела P = m(g+a). Учитель просит класс проанализировать полученный результат. После анализа вводит понятие перегрузки и коэффициента перегрузки. III. Учитель просит определить модуль силы веса тела, стоящего на опоре, в случае ускоренного движения опоры вниз. Вызывает учащегося к доске и оказывает помощь при решении задачи. Анализируют ответ P = m (g – a). Выслушивает ответ ученика, поправляет в случае необходимости и вводит понятие невесомости тела. | I. Записывают определения. Делают поясняющие рисунки в тетрадях II. Решают задачу вместе с учителем. Делают вывод, что вес тела, лежащего на опоре, движущейся ускоренно вверх, больше силы тяжести. III. Учащийся решает задачу у доски при помощи учителя. Анализирует полученный результат. Делает вывод, что вес тела, лежащего на опоре, движущейся ускоренно вниз, меньше силы тяжести и равен нулю при ускорении опоры, равном, ускорению свободного падения. | Коммуникативные: формулировать и аргументировать свою точку зрения. Познавательные: осмысление услышанной информации, построение логической цепочки рассуждений; знаково-символические действия (моделирование) |
Физкультминутка | 1 | Учитель читает стих: Шеей крутим осторожно — Голова кружиться может. Влево смотрим — раз, два, три. Так. И вправо посмотри. (Вращение головой вправо и влево.) Вверх потянемся, пройдёмся, (Потягивания —руки вверх, ходьба на месте.) И за парты вновь вернёмся. | Обучающиеся делают зарядку | Коммуникативные: выполнять общие действия в коллективе |
Первичная проверка усвоения полученных знаний | 5 | Ответьте на вопросы: 1. Что показывают весы: массу или вес тела? 2. Может ли тело, имея массу, не иметь веса? Если да, то при каком условии? 3. Что общего у веса тела и силы тяжести? Чем они различаются? 4. Придумайте примеры, когда вес тела равен силе тяжести, меньше силы тяжести, больше силы тяжести, равен нулю. | Обучающиеся отвечают на вопросы | Коммуникативные: формулировать и аргументировать свою точку зрения. Познавательные: построение логических рассуждений, включающих установление причинно-следственных связей. Регулятивные: осознание качества и уровня усвоения знаний. |
Домашнее задание | 1 | §37, отв.на вопросы (с.168), упр. 1 – 3 (с.168) | Записывают домашнее задание | |
Рефлексия | 1 | Подводит итоги урока. Просит оценить учеников свою деятельность на уроке на листе самооценки. | Слушают учителя и проводят самооценку | Регулятивные: уметь соотносить цель и результат. |
Литература:
1. Грачев А.В. «Физика. 7 класс». Москва: Вентана-Граф, 2019 г.
2. Грачев А.В., Погожев В.А. и др. «Проектирование учебного курса: 7 класс. Методическое пособие», Москва: Вентана-Граф, 2014 г.
3. В.И. Коваленко «Школа физкультминуток», Москва: ВАКО, 2010 г.
Сила реакции земли — обзор
Составляющие силы реакции земли
На рисунке 7.17 показана сила реакции земли ( F ) и переднезадняя ( F X ), вертикальная ( F Y ) и медиолатеральные ( F Z ) компоненты силы реакции опоры в одной точке в фазе одной опоры правой ноги. При ходьбе прямо вперед медиолатеральный компонент обычно очень мал, что приводит к небольшому перемещению тела из стороны в сторону.На рис. 7.18 показаны переднезадний, вертикальный и медиолатеральный компоненты силы реакции опоры (кривые сила-время), действующие на каждую ногу во время цикла походки. Движение центра тяжести во время цикла походки определяется равнодействующей силой, действующей на него. В течение периода одиночной опоры результирующая сила, действующая на центр тяжести, определяется массой тела и силой реакции земли, действующей на заземленную ступню. В период двойной опоры результирующая сила, действующая на центр тяжести, определяется массой тела и силами реакции опоры на обе ступни.
Вертикальный компонент силы реакции опоры, действующей на каждую ногу, обычно характеризуется двумя плавными пиками, причем подъем и спад каждого пика занимают примерно половину фазы опоры (см. Рис. 7.18). Подъем и спад первого пика примерно соответствуют периоду от удара пяткой до отрыва от пятки, а подъем и спад второго пика примерно соответствуют периоду от отрыва пятки до отрыва от пятки.
Подобно вертикальному компоненту, переднезадний компонент обычно характеризуется преобладанием двух плавных пиков, подъем и спад которых соответствуют подъему и падению двух пиков вертикального компонента.Результирующий переднезадний компонент силы действует в обратном направлении от средней точки двойной опоры до отрыва от пятки (сила торможения), указывая на замедление центра тяжести, то есть скорость движения тела вперед уменьшается. От пятки до середины следующей двойной опоры результирующий переднезадний компонент действует вперед, указывая на ускорение центра тяжести вперед, то есть скорость движения тела увеличивается.
Результирующий медиолатеральный компонент силы, действующей на центр тяжести во время цикла походки, действует медиально во время одиночной стойки и меняет направление во время двойной опоры, т.е.е. от медиального на правой стопе до медиального на левой стопе в период от удара левой пяткой до отрыва правой ноги (см. рис. 7.18).
В дополнение к характерным плавным фазам вертикального, переднезаднего и медиолатерального компонентов силы реакции опоры на каждую ступню, все три компонента часто характеризуются одним или несколькими переходными шипами вскоре после удара пяткой, которые отражают воздействие пятка с землей (см. F Y на рисунке 7.18). Амортизирующая обувь уменьшит или устранит эти кратковременные всплески (Czerniecki 1988).
Ошибка разрыва связи
Сп16 ЭНГР-2140-ЛО1
Перейти к содержанию Приборная панельАвторизоваться
Панель приборов
Календарь
Входящие
История
Помощь
- Мой Dashboard
- Sp16 ENGR-2140-LO1
- Home
- Syllabus
- Modules
- MDSolids Login
- Piazza
- Pages
- Assignments
- Quizzes
- Conferences
- Collaborations
- My Media
- Research Help
- IDEA Course Оценки
- Submitations курса IDEA
К сожалению, вы обнаружили неработающую ссылку!
двух- и трехуровневых элементов
двух- и трехуровневых элементов
Элементы с двумя и тремя усилиями
Существует много типов конструктивных элементов.Это было замечено в предыдущая лекция о том, что условие поддержки имеет значительное влияние от поведения конкретного элемента. Выявить определенные типы структурных элементов, которые имеют отличные характеристики. Если элемент имеет штифты или шарнирные опоры на обоих концах и не несет никакой нагрузки между ними, он называется двухсиловым элементом . Эти элементы могут иметь только два силы, действующие на них на их шарнирах. Если на тело действуют только две силы то есть в равновесии, то они должны быть равными по величине, коллинеарными и противоположное по смыслу.Это известно как принцип двух сил . Принцип двух сил применяется к ЛЮБОМУ члену или структуре, у которых есть только на него действуют две силы. Это легко определить, просто посчитав количество мест, где силы действуют на этот член. (ПОМНИТЕ: реакции считается силами!) Если они действуют в двух местах, то это двусиловой член.
Одним из уникальных аспектов этих элементов является то, что линия действия равнодействующих сил, действующих на два конца элемент ДОЛЖЕН проходить по центральной линии структурного элемента.Если они нет, элемент не будет в равновесии! Таким образом, даже если загрузка существует на обоих концах и состоит только из одного из компонентов (например, F x или y ), равнодействующая всех сил, действующих на двойную силу член проходит через центральную линию члена.
Большинство, но не все, двухсиловые элементы являются прямыми. Прямые элементы обычно подвергаются растяжению или сжатию. Эти члены другие геометрические формы будут иметь изгиб поперек (или внутри) их сечения в дополнение на растяжение или сжатие, но принцип двух сил все еще применяется.Там БЕЗ ИСКЛЮЧЕНИЙ !!!
Некоторыми распространенными примерами двухсиловых элементов являются колонны, стойки, подвески, раскосы, балочные элементы фермы, цепи и вантовые подвесные системы. Какие еще есть?
Разберем простые Показана система. Это упрощение указанной лампы. Нагрузка на точка F — подвесной светильник. Считается, что все стыки скручены. Если элемент BC изолирован, можно увидеть, что силы, действующие только на точки C и B.Это означает, что это двухсиловой элемент. Линия действий силы в точке C также должны проходить через точку B; аналогично сила в точке B также должен пройти через точку C. Если сила в точке B не прошла через точку C (B ‘на диаграмме) сила вызовет момент около точка C и равновесие было бы невозможно. Потому что две силы равные по величине, коллинеарные и противоположные по смыслу, двухсиловые элементы действуют только при чистом растяжении или чистом сжатии. Опоры, такие как кабели, имеют тенденцию хорошо работают два силовых элемента.
Если на тело в равновесии действуют три непараллельные силы, он известен как трехсиловой элемент . Три силы взаимодействуют с структурный элемент очень специфическим образом, чтобы поддерживать равновесие. Если трехсиловой элемент находится в равновесии, а силы не параллельны, они должны быть параллельны. Следовательно, направления действия всех трех сил действующие на такой член должны пересекаться в общей точке; любая сила следовательно, уравновешивает две другие силы.Трехсиловой член часто является элементом, имеющим одну нагрузку и две реакции. Эти члены обычно имеют силы, вызывающие изгиб, а иногда и дополнительное напряжение и сжатие. Наиболее распространенный пример элемента с тремя усилиями — простой луч.
В примере лампы также есть трехсиловой элемент как часть ее конструкции. система.
Если один изолирует элемент AF в раме, соединенной штифтами, с
справа, видно, что у него есть силы, действующие в трех точках: A, C и
F. Схема системы свободного тела представлена на диаграмме ниже.Величина и направление действия силы при F, 10 тысяч фунтов, известны.
Линия действия силы в точке C известна, потому что она должна быть равна
и противоположно силе C двухсилового элемента CB. Линия действий
сил в точке F и точке C пересекаются в точке X. Линия действия
силы в точке A также должны проходить через точки A и X. (Почему это?)
Линии действия реакций в точках A и C имеют теперь определено. Проблема установления их смысла и величины останки.Смысл этих сил может быть интуитивно понятен в этом пример, но это не всегда так. Принцип трех сил , продемонстрировано пошагово, покажет, насколько просто установить как смысл, так и величина реакций системы трех сил:
- Изобразите вектор нагрузки в удобном масштабе.
- Выберите любую из других сил и проведите линию, параллельную ей.
сила через головку вектора нагрузки.
- Через хвост вектора нагрузки проведите линию, параллельную оставшейся сила. (Если эти линии вытянуть достаточно далеко в каждом направлении, они образуют замкнутый многоугольник).
- Примените стрелки к векторам, чтобы они теперь были соединены голова к хвосту. Полигон силы теперь готов; стрелки показывают смысл, а векторы можно масштабировать, чтобы определить величину.
Если бы предполагалось, что линия действия силы противодействия через точку A приняла направление, отличное от точки X, система не будет параллельной системой сил.Хотя это могло быть в силовом равновесии, это не было бы в момент равновесия, потому что сумма моментов по поводу ЛЮБОЙ точки больше не было бы нуля. Это можно увидеть ниже.
Ниже приведен пример разрешения опоры. сила для простой ламповой системы.
Третий вектор силы проведен по линии действия проходя через вторую опору. Теперь смысл и направление известны. Если бы диаграмма была нарисована в масштабе, величина всех сил могла бы быть быть просто определенным с использованием любого графического метода разрешения силы.
Три-форс Участники
Вопросы для размышления
хммм …..
Домашние задания
Дополнительное чтение
Schaeffer, R.E. Элементарные конструкции для архитекторов и строителей. Глава
2.
Schodek, Daniel. Структуры, второе издание. С. 41 — 44.
Авторские права © 1995, 1996 Крис Х. Любкеман и Дональд Петинг
Авторские права © 1997 Крис Х. Любкеман
Universal Physics JournalСтатья XI: Силы реакции | ||
Автор: Итан Скайлер | ||
| Цель Силы реакции, пожалуй, самая неправильно понимаемая группа силы во всей науке.Хотя они играют важную роль в каждом мероприятии, связанном с ускорением, они редко получить правильное признание. Авторы науки часто предоставляют невозможные качества для силы реакции только для того, чтобы позже сделать вывод что рассматриваемая сила реакции «фиктивна» или «мнима» поскольку эти невозможные свойства силы реакции оказываются заметно отсутствующими в авторском мероприятии. Такой фальшивый выводы о роли сил реакции привели многих наших ведущих ученых заблудился.Эффект просачивания породил широкий спектр научных злоключений, которые увели нас далеко от понимания истины. Соответственно, цель статьи XI — установить реальность реакции сил наряду с определением их настоящих и истинных качеств. | ||
Статья XI | ||
| (2) Как получилось, что такие научные авторы могут представить десятки вращательные и орбитальные события, в комплекте с векторными рисунками силы, с ни единого упоминания о направленном вовне, измеряемом в масштабе, ускорении / силе реакции, которые обычно называют центробежный? В качестве решения этой проблемы используется эксклюзивный рисунок. используется техника, известная как диаграмма свободного тела.От ограничивая векторный рисунок ускоряющего события, чтобы показать только силы действия, воздействующие на тестовый объект, и, в частности, пренебрежение показать любые силы реакции, которые тестовый объект может испытывать внутренне или произвести впечатление внешне против вызывающего ускорение второго объекта, научным авторам удалось представить появление понимания за счет ограничения размаха вектора силы рисунок, включающий только те силы, которые считаются приемлемыми для диаграмма свободного тела.Таким образом, через исключительный техника представления действия-силы-половины правды с помощью техники диаграмма свободного тела, авторы современной науки успешно избежать необходимости объяснять оставшуюся половину правды силы реакции, правда, которую они явно не понимают. | ||
| (3) Честно говоря, как представители широкой общественности, мы должен нести часть ответственности за этот странный поворот События.Видите ли, в то время как авторы современной науки не понимают истинная природа центробежного ускорения / силы реакции, присутствующие в каждом и каждое круговое событие, они делают признать логические причины, по которым понимание широкой публикой часто неверно. Кроме того, научные авторы и учителя были излишне обременены необходимостью неоднократно исправлять (насколько они способны) непонимание нескончаемого легиона не-ученых по этому вопросу. | ||
| (4) Распространенные заблуждения о центробежной силе раскрываются в следующих событиях: (а) Студент крутит ведро с вода наверху. Из ведра не теряется ни капли воды. Студент заявляет, что центробежная сила воды заставляет воду оставаться в вихревом ковше, даже когда он находится над головой. б) горшечник, «бросая» глиняный горшок большого диаметра на медленно вращающийся круг, случайно наступает на педаль скорости, в результате чего колесо внезапно увеличивает свое скорость вращения.В результате мягкий глиняный горшок выпирать по краю, а затем плюхнуться. Гончар заключает, что внешнее притяжение центробежной силы является причиной кончина банка. (c) Когда машина въезжает на поворот налево, книга на Пассажир видит, как он начинает ускоряться вправо, когда он скользит по плавный рывок автомобиля. Опять же наблюдатель заключает, что центробежный сила — причина. Ведь в какой-то момент книга покоится на рывок, и в следующий момент видно, как он ускоряется до более быстрого и более быстрым темпом, когда он движется по бросаться.Некоторым наблюдателям кажется естественным заключить, что некоторые необъяснимая сила, направленная от центра поворот автомобиля, внезапно присутствует и действует как причина этого мероприятие. Разве это не идеальный пример мероприятия, когда наблюдаемое центробежное ускорение объекта вызвано по «бегущему центру» центробежная сила в полном соответствии с ЗАКОНОМ Ньютона I? | ||
| (5) Я должен признать, что чувствую некоторую симпатию к профессора, чья работа состоит в том, чтобы развеять эти представления о существовании направленная наружу сила действия, вызывающая ускорение.В этих трех событиях правда в том, что нет такого направленного вовне действия, вызывающего ускорение сила существует. В каждом из трех событий, если путь относительно Земля, рассматриваемого объекта, (а) вода в ведре, (б) край глиняный горшок или, (c) книга на приборной панели автомобиля, вычерчена, вы обнаружите правда, что нет ускорения во внешнем направлении (за пределы прямой путь) происходит к исследуемому объекту. Но, к сожалению, в процессе неоднократного опровержения этих общие недоразумения относительно природы центробежной силы, ученые непреднамеренно позволили тем же ненаучным недоразумения, чтобы стоять как определение центробежной силы.Потом, показав, что такая сила действия вместе со всеми характеристики, описанные не-учеными, на самом деле не существуют в любое событие, связанное с центростремительным ускорением, ученые считают оправданным делая вывод о том, что «центробежная сила фикция». Более точным опровержением было бы «воображаемое направленное вовне» центробежное действие. сила «, как считает неученый, присутствующий и действующий как причина воображаемое ускорение, направленное наружу, для объекта в событии, включающем центростремительного или направленного внутрь ускорения фактически не существует в такие мероприятия. | ||
| (6) Если авторитет тысячи авторов современной науки быть достаточной причиной, чтобы положить конец всем научным обсуждение реальности центробежной силы? Должно, по мнению авторов моего 1300-страничного текста по физике. «Мы обещаем никогда больше не упоминать о центробежной силе», — говорят они. состояние с явным облегчением. От Пример ясно, что они надеются, что другие последуют их примеру. | ||
| (7) Вам, как и мне, интересно, почему это так? ученые, похоже, довольны тем, что позволяют не-ученым определять а описать характеристики центробежной силы? Нет ли ученый, готовый сделать собственное определение, научно обоснованное определение для всех? С этой целью я предлагаю следующее определение для центробежное ускорение / сила реакции. | ||
| (8) Определение: Центробежная сила это внутренняя по отношению к материи, направленная вовне сила реакции на центростремительное ускорение, которая генерируется в каждом ускоряющем компоненте материи объекта с помощью этого ускорение / сила реакции всегда вызвана и всегда обеспечивает необходимая поддержка и прекращение для внутренней по отношению к материи или внешней по отношению к материи, направленной внутрь, центростремительной силы ускорения / действия, которая отвечает за действие как причина центростремительного или направленного внутрь ускорения каждого компонента от прямого пути движения, многократно проведенного по касательной к изогнутому компоненту путь путешествовать. | ||
| (9) Теперь, когда у нас есть определение, совместимое с концепции и понимания Универсальной Физики, что тогда характеристики этой центробежной силы реакции? Как это присутствие, предсказанное законами Ньютона? Что написал Исаак Ньютон относительно реальности центробежной силы? Когда его присутствие может быть по шкале сил? Когда его присутствие нельзя измерить любой масштаб? Если центробежную силу можно измерить с помощью шкалы сил, даже иногда, почему современные ученые продолжают отрицать его существование? Что означает ускорение по круговому события, как говорят, направлены «от прямого пути путешествия, многократно по касательной к изогнутой траектории движения компонента? »С центробежной силой, являющейся ускорение / сила реакции, которая присутствует в событиях, связанных с центростремительной ускорение, существует ли идентичное ускорение / сила реакции в каждое событие, связанное с линейным ускорением? В то время как центростремительное ускорение вызывается центростремительным (направленным внутрь) ускорение / сила действия, подтверждение центробежного (направленное наружу) ускорение / сила реакции означает, что «центробежное ускорение «возможно? Пока силы реакции присутствуют во время силовой активности ускорения, присутствуют ли они также во время сильных событий, когда ускорение отсутствует? В общем, эти вопросы поможет направить наше исследование на реальность и особенности силы реакции. | ||
| (10) Центробежная (направленная наружу) сила, реагирующая на центростремительное (направленное внутрь) ускорение является внутренним (Тип 1 или Тип 2) поддерживающая сила, которая создается реактивно, в пределах каждого ускоряющего компонент объекта, испытывающего центростремительное ускорение. В центробежное ускорение / сила реакции — это сила, действующая внутри вещества, как показано наличие эффекта суммирования сил всякий раз, когда объект ускорение вызывается внешней (контактной) силой.Этот Effect — важный инструмент в нашем наборе инструментов Force Investigation Toolbox. Мы знать из его приложения, что в любое время внешняя (контактная) сила приложенному к объекту противостоит внутренняя по отношению к материи сила, генерируемая внутри Каждый компонент объекта присутствует эффект суммирования сил внутри материи объекта. В случае центростремительного ускорения, например как когда космонавт стоит на внутренней поверхности внешней стены вращающейся в форме колеса космической станции, центростремительный ускорение / сила воздействия — это внешняя (контактная) сила, приложенная к ноги космонавта.Поскольку каждый компонент тела космонавта несет с собственным направленным наружу центробежным ускорением / силой реакции вес при переносе в том же направлении наружу накопления всех такие силы a / R от аналогичных компонентов, которые расположены внутрь внутри тело космонавта Эффект суммирования сил присутствует полностью. Таким образом, безопасно сделать вывод, что ускорение / сила реакции, реагирующая на центростремительную ускорение всегда является внутренней силой по отношению к материи. | ||
| (11) Сила ускорения / противодействия также всегда направлена в противоположную сторону. к физической активности ускорения, вызванной ускорение / сила действия. Таким образом, ускорение / сила реакции в линейное событие похоже на пассажира, который сидит лицом назад в автомобиле, который ускоряясь вперед. Никакая установка мысли не может изменить факт что пассажир ускорения / реакции смотрит в противоположном направлении активности ускорения.В равной степени верно и то, что нет происходит событие, направленное назад. Ускорение / реакция Пассажир просто едет, но ничего не делает. | ||
| (12) То же самое верно и для круговых событий. Таким образом ускорение / сила реакции в круговом событии подобна пассажиру, который сидит боком лицом наружу в поворачивающейся машине, едущей на устойчивой скорость при активности направленной внутрь (центростремительной) ускорение.Опять же, никакое расположение мыслей не может изменить того факта, что пассажир с ускорением / реакцией смотрит в сторону, противоположную направлению движения. активность ускорения. Опять же очевидно, что нет происходит событие, направленное вовне. Ускорение / реакция Пассажир просто едет, но ничего не делает. | ||
| (13) Теперь, когда мы осознаем невозможность центробежного ускорение / сила реакции, чтобы действовать как причина любого события, осознайте, что Эрнст Мах, а позже Альберт Эйнштейн, пропустили этот момент, когда они ошибочно приняли направленный наружу центробежный ускорение / сила реакции, которую испытывает человек во время развлечения парк «карусель» как направленное вовне событие, вызывающее «динамическая гравитационная сила» типа «неизвестного Исааку» Ньютон ».Здесь вы можете увидеть проблемы, возникающие при идет к фальстарту, когда логика теряется в самом начале. В Универсальная физика мы признаем, что центробежный силы, испытанные на «карусели», — все ускорение / силы реакции, вызываемые и обеспечивающие поддержку направленное внутрь центростремительное ускорение / силы действия, которые являются силами ответственны за создание направленного внутрь центростремительного ускорения для орбитальные объекты.В отличие от воображаемых мысленных экспериментов Маха и Эйнштейна, нет никаких ориентированных вовне силы действия, вызывающие ускорение, присутствующие в карусели. Вместо этого присутствующие направленные наружу силы являются центробежными. ускорение / силы реакции, обеспечивающие закон Ньютона III прогнозируемая и необходимая поддержка направленного внутрь центростремительного ускорения / Действие силы, которые на самом деле являются силами, действующими как причина этого направленное вовнутрь событие. | ||
| (14) Между тем, понимание этих событий Исааком Ньютоном остается по сути правильно.Он действительно имел в виду центробежный ускорение / силы реакции в его вращающемся ведре с водой (обычно известен как «Ведро Ньютона») как «силы, отступающие от оси кругового движения». Это заявление, наряду с его признанием ускорения в целом и центростремительное ускорение, в частности, как деятельность, которая всегда вызванная силой воздействия (ЗАКОН I), которая, в свою очередь, всегда является причиной своей собственной силы. ускорение / сила реакции (ЗАКОН III и Определение V) означает для меня, что он знал об их работе, Ньютон не поддержал бы ни Маха, ни Эйнштейна. мысленные эксперименты относительно их теорий относительно источника и роли центробежных ускорение / реакция силы. | ||
| (15) Вопреки утверждению Альберта Эйнштейна «неизвестно Исааку Ньютону», я думаю, Исаак Ньютон полностью осознавал более простую истину относительно происхождения центробежной силы реакции, направленной наружу. В ПРИНЦИПИИ в Определения V на стр. 3 при обсуждении характеристик направленная внутрь центростремительная сила, вызывающая ускорение, Ньютон назвал центростремительной силе как «той силе, которая противостоит самой себе…» Этот заявление Ньютона. хотя и краток, но имеет огромное значение для него ясно указывает на то, что Ньютон видел центростремительная сила, вызывающая ускорение, как вызывающая собственное центробежное сила реакции оппозиции. (Я предпочитаю «поддержку» «оппозиции» поскольку центробежная сила реакции поддерживает, но никоим образом не служит уменьшить или отменить центростремительную силу воздействия, как можно было бы ожидать от «противодействующая сила.) | ||
| (16) Ньютон ясно видел в круговых событиях, что вызывающая ускорение центростремительная сила действия оказывала поддержку в форма центробежной силы реакции, поддерживающей взаимное ускорение. Я согласен с пониманием Ньютоном сил действия / противодействия в круговой События. Я также распространяю это понимание на линейное ускорение. События. Я назвал во всех типах ускоренных событий сила действия как сила ускорения / действия (сила a / A) и взаимное реактивная опорная сила как ускорение / сила реакции (сила прямого / обратного направления). Удовлетворенный тем, что центростремительная А / А сила является причиной собственной поддержки центробежной A / R-силы, у Ньютона не было бы другого выбора, кроме как рассматривать «динамику Эйнштейна» теория гравитационной силы относительно источника и причины центробежной силы прямого / обратного движения. который присутствует в каждом событии, связанном с центростремительным ускорением, поскольку теория без заслуг.Кроме того, я думаю, что если бы Ньютон был жив сегодня, упрекать нас всех в том, что мы принимаем излишне сложную и необоснованную теорию Эйнштейна как факт. Действительно, «динамическая гравитационная сила»! | ||
| (17) Если бы Ньютон был полнее в объясняя свое понимание о влиянии силы на движения предметов, его читатель понимал бы больше завершено, фактически закрывая дверь принятия, когда Эрнст Мах мысленный эксперимент, который дал невозможные свойства центробежное ускорение / силы реакции, был первым предложил.И если бы понимание Эрнста Маха было более полным, возможно он никогда бы не счел такие воображаемые мысленные эксперименты достойными выражения. Наконец, Эрнст Мах никогда не высказывал своего непонимание роли центробежного ускорения / сил реакции, Альберт Эйнштейн, возможно, никогда не предложил свой бессиловая теория гравитации, известная как «Общая теория Относительность ». (Анализ« принципа Маха »см. В Вопрос 3.Для более полного и менее запутанный набор правил относится к статье X, Универсальные правила физики для силы и движения. Для анализ гравитации как универсальной силы Ньютона см. статью VIII, Вселенская гравитация. Отказавшись от теории Эйнштейна «Общая теория относительности» читать статью VI, Гравитация = Ускорение?) | ||
| (18) В Универсальной физике есть четыре типа или разновидности силы. Тип 1 — это внутренняя по отношению к материи сила, которая встречает противодействие или вызывает его собственная поддержка против другой внутренней силы. Внутренний против внутренний. Тип 2 — это внутренняя сила, которая встречает сопротивление. против внешней силы по отношению к материи, известной как контактная сила присутствует между объектами. Внутреннее против внешнего. Тип 3 — это внешняя по отношению к материи сила, которая противостоит | ||
| (18) Когда происходит центробежное ускорение / Реакция сила, измеряемая шкалой? Центробежные силы A / R могут быть измеряется в событиях, где центростремительное ускорение / сила действия является внешней по отношению к материи (контактная) сила.Когда a / A сила является внешней силой прижат в одном направлении к тестируемому объекту в одной или нескольких точках контакта со вторым объектом, совокупная сумма несметного числа ускоряющихся тестовых объектов внутреннего ускорения материи / Силы реакции также присутствуют как внешние сила в противоположное направление в одних и тех же точках взаимного соприкосновения. Вставка шкалы сжатия или растяжения в этих точках взаимного контакта позволит для измерения этой пары действие / реакция центростремительные / центробежные силы. | ||
| (19) Именно такое событие часто бывает выраженный, раскачивания вручную асфальтоукладчика на конце короткой веревки. Вставьте шкалу натяжения в любом месте между рукой и асфальтоукладчиком. В шкала будет отображать то, что в конечном итоге является одним центростремительным (направленное внутрь) ускорение / сила действия, вызывающая и тем самым поддерживается совокупным количеством несметного количества индивидуальных внутренних материальных центробежное (направленное наружу) ускорение / силы реакции.Поместите шкалу натяжения между рукой и веревкой для наивысшее прочтение стихов A / A A / R. Поместите шкалу посередине веревки для меньшее значение силы. Поместите шкалу между веревкой и асфальтоукладчиком, чтобы получить еще меньшее значение. Разделите брусчатку на две части и поместите шкалу между частями для еще меньшего чтения взаимная пара центростремительных / центробежных A / A и A / R сил. (Пожалуйста позвольте мне обратиться только к горизонтально направленным силам в этом простом событии.) | ||
| (20) Поймите, что с каждым тестом вы измерение величины направленного внутрь, вызывающего ускорение, сила центростремительного воздействия, которая также вызывает собственную ограничивающую поддержку в виде направленного вовне, ускоряюще-реагирующая, центробежная сила реакции. Помните также, что в каждом эксперименте вы используете механические весы. чтобы выявить сильное присутствие центробежного или направленного наружу сила.Теперь я спрашиваю вас, какое утверждение, по вашему мнению, представляет правда: (а) Центробежная сила в определенных событий и, следовательно, представляет собой реальную силу ускорения / реакции, которая обеспечивает служба поддержки и прекращение действия центростремительного ускорения / силы действия, вызывающего событие, или (b) несмотря на то, что шкала, центробежная сила все еще воображаемый, и поэтому эксперты правильно обозначают его «фиктивный». | ||
| (21) Если вы выберете (а) как представляющий истину, то это решение ставит вас впереди всех авторов физики, кроме двух в моей библиотеке книг по наука.Если вы выбрали (b) как представляющий истину, то вы должны думаю, что после того, как заключение было принято, оно остается постоянным даже когда все «факты», подтверждающие его принятие, были сметены. | ||
| (22) Когда присутствует центробежное ускорение / Реакция сила, не измеримая ни по какой шкале? Чтобы понять ответ на это вопрос, важно, чтобы вы понимали разница между внутренним по отношению к материи и внешним по отношению к материи.русские силы. В центробежное ускорение / сила реакции всегда в основном внутренняя сила, которая реактивно генерируется в каждом компоненте ускоряющегося материя объекта. Между тем сила ускорения / действия, являющаяся сила действия, которая является причиной ускорения объекта, может принимать форма либо внешней силы, приложенной через общую точку контакт, которым объект делится со вторым объектом, как показано в Вращающаяся космическая станция в форме колеса и наша вихревой асфальтоукладчик или Сила ускорения / действия может быть внутренней силой, которая в данном случае активно генерируется внутри каждого компонента ускоряющегося материя объекта.Здесь не требуется контакта со вторым объектом. Хороший и распространенный пример внутреннего ускорение / сила действия — это сила гравитации, когда она действует как причина линейного или орбитального ускорения объекта. | ||
| (23) Как и все другие силы действия, гравитация может действовать как причина ускорения объекта. Но если условия поддержки не позволяют объекту разгоняться, то сила гравитации остается как сила неускорения / действия (n-a / A сила), как если бы вы измеряли n-a / A силу вашего гравитационного веса против Земли, используя шкалу сжатия, которая твердо поддерживается непрочный пол. | ||
| (24) Когда вы стоите на перилах корзины с высотный шар, конструкция корзины поддерживается за счет плавучести над головой воздушного шара, ограничивающего гравитацию компонентов вашего тела к Земле на роль силы неускорения / действия Типа 2. Пока носить как основной, так и запасной парашюты, сойти с перил, ваше тело теряет внешний вид воздушного шара. опорная сила.С небольшой разницей в скорости между вашим телом и воздухом в вертикальном направлении сила тяготения вашего тела теперь становится почти 100% ускорение / сила действия 1-го типа, поскольку оно активно и изначально заставляет ваше тело линейно ускоряться со скоростью почти 32 фута / сек / сек к поверхности Земли. | ||
| (25) После потери поддержки конструкции воздушного шара, ваше ускорение не только мгновенное, но и временно достигает максимальной скорости в течение всего пути после выхода из корзины.Ваша вертикаль скорость относительно воздушного шара и поверхности Земли далеко внизу изначально низкая, но ваша скорость ускорения вызваны множеством активных сил ускорения / действия. генерируется в каждом из множества компонентов материи вашего тела, сразу по максимальному значению. В этом нет задержки ускорение как в «физике» мультяшных героев, которые шагают с края обрыва, но не начинайте ускоряться к дну каньона до тех пор, пока не вступит в силу осознание их тяжелого положения.По правде говоря, ваш ускорение при выходе из корзины происходит мгновенно. Здесь нет колебания. Нет и легендарного «сопротивления». силы внутри вашего тела, возражая против вашего немедленного ускорения на его самая высокая ставка. Ваше немедленное ускорение точно так же, как предсказано Формула Ньютона: ускорение = Сила / масса. Не существует выдумки фактор, утверждающий, что формула Ньютона вступает в силу только после короткой задержки в то время как легендарные «силы сопротивления» «превосходить».Эти ложные условия основаны исключительно на желаемом думая об авторе, а не о каких-либо наблюдаемых факт. | ||
| (26) В качестве проверки непосредственного характера ускорения выступите против Земля, держа камень на расстоянии вытянутой руки. Теперь отпусти хватку на скале. Поскольку его ускорение вызывает увеличение скорости движения его движение от вашей руки в направлении Земли, вы можете заметить какие-либо колебания перед ускорением камня? Попробуйте этот эксперимент снова и снова.Снимите это на высокоскоростную камеру. Для определенных скорость камня относительно вашей руки изначально мала по сравнению с остальная часть его ускорения идет в направлении Земли. Но ускорение не скорость и не скорость, которая является скоростью в каком-то определенном направлении. Проще говоря, ускорение — это скорость изменения движения активного объекта. (изменение скорости и / или направления движения, или изменение скорости) от когда он был неактивен. Камень почти на 100% неактивен в своем покой-движение при поддержке вашей рукой.Когда вы отпустите рок, его скорость при удалении от руки сначала увеличивается на скорость ускорения 32 фута / сек за каждую секунду падения. Существует без колебаний или задержек в этом мероприятии, как о вашем ускоренном рок-эксперименте проверим. | ||
| (27) Возвращаясь к нашему мероприятию по прыжкам с парашютом на воздушном шаре и вопрос о наличии центробежного ускорения / реакции силу, не измеримую никакими шкалами, поймите, что единственное разница между центробежным ускорением / силой реакции и линейной ускорение / сила реакции — это просто постоянно меняющееся направление движения центробежное ускорение / сила реакции по сравнению с неизменяющейся направление линейного ускорения / силы реакции.Нет другого существует разница между этими двумя внутренними средствами поддержки реакции на ускорение. силы, поскольку они имеют одну и ту же причину ускорения / действия силы, в то время как реактивно обеспечивая одинаковое и противоположное ускорение / реакцию опорная сила. | ||
| (28) Таким образом, когда вы сойдете с перил корзины, внутреннее неускорение типа 2 / сила гравитации, возникающая в Направление Земли в каждом из ваших компоненты тела материи переключаются, чтобы стать ускорением / действием 1-го типа силы и начинает мгновенно вызывать самую высокую скорость направленное вниз ускорение, которое каждый компонент будет испытывать в течение всего падают к поверхности Земли.Каждое такое внутреннее ускорение / действие сила внутри каждого компонента материи вашего тела вызывает не только компонента, но также действуя как причина этого компонента внутреннее ускорение / поддерживающая сила реакции, как прогнозируется ЗАКОН Ньютона III, всеобщий закон взаимности Силы, Правило 7, Часть 2 Универсальные правила физики для силы и движения и определение Ньютона V где он четко определяет центростремительную силу, вызывающую ускорение, как бытие «Та сила, которая противостоит самой себе… ». Здесь Ньютон признает что центростремительная сила, вызывающая ускорение объекта или их части также вызывают его собственную центробежную силу прямого / обратного вращения. отражается обратно от ускоряющихся частей объекта, чтобы обеспечить LAW III требуется поддержка. Это рефлексивное «противопоставление самому себе», характерное для сила A / A — это точная причина, по которой сила A / R обеспечивает поддержку, но делает нечего снижать или отменять продолжающееся ускорение. Значение цитаты Ньютона из Определения V заключается в том, что опорная сила A / R вызвана существовать за счет силы A / A.Я считаю полезным подумать об этих двух ускоряющие силы как одна и та же сила. A / A сила присутствует и вызывает ускорение как в круговых, так и в линейных событиях, в то время как также вызывая существование силы A / R, которая в равной степени присутствует в обоих круговых и линейные события, обеспечивающие поддержку ускорения, поскольку оно отражается обратно от ускоряющейся материи. Хотя усилие переднего / заднего хода часто можно измерить во время ускорения это никогда не является причиной этого ускорения. | ||
| (29) Проблема, с которой мы сталкиваемся, заключается в том, как измерить ускорение / сила реакции, присутствующая в каждом ускоряющем компоненте иметь значение. Во всех случаях сила ускорения / реакции равна всегда внутренняя сила, здесь, в соревнованиях по прыжкам на воздушном шаре на большой высоте, вызывающее событие ускорение / сила земного притяжения также всегда внутренняя сила. С в этом случае они оба Внутренние силы типа 1, важно понимать, что действие сила и сила реакции присутствуют одновременно время внутри каждого ускоряющегося компонента материи вашего тела.По этой причине а / р силу невозможно измерить, поскольку она существует, чтобы обеспечить окончательную поддержку гравитационному a / A сила, которую также невозможно измерить, поскольку нет возможности вставить невероятно малую шкалу между одной такой парой внутренних сил действие / противодействие. В виде Исаак Ньютон мог бы сказать: «На этот раз — это всего ». отчаянно! », хотя бы раз в одном компоненте материи вашего тела, нет существует четкое разделение между ускорением свободного падения / силой действия действие в одном направлении и результирующее ускорение / сила реакции реагирует в противоположном направлении.Таким образом, здесь нет возможности внутреннее усилие A / A может быть ограничено одной стороной невероятно малый масштаб, в то время как внутренняя передняя сила может быть ограничен другой стороной невероятно малых масштабов. это по этим причинам не существует механического способа прямого измерения внутренняя сила 1-го типа, когда ее противодействующая или поддерживающая сила является другой Внутренняя сила типа 1. | ||
| (30) С прямым механическим измерением противоположных пары внутренних сил типа 1 невозможны, существуют удовлетворительные методы «измерения» каждой такой силы.Подставив Сила накопления внешних по отношению к веществу типа 3 одинаковой величины и направление для одного из внутренних действия или противодействия, механическая шкала отлично подойдет для измерения общая величина оставшейся внутренней силы. | ||
| (31) Рассмотрим событие с объектом над Землей. поверхность, которая свободно ускоряется в направлении Земли, находясь внутри среда вакуумной камеры без трения.Мы знаем силу действия всегда присутствует во время каждого события, связанного с ускорением, которое является любым изменение скорости объекта, включая любое изменение скорости движения всего объекта или его частей, или любое изменение направления движение всего объекта или его частей. Мы знаем это в этом случае сила воздействия — это внутренняя сила земного притяжения. активно и отдельно генерируется в каждом компоненте материя падающего объекта.Мы также знаем, что каждое ускорение / действие сила всегда вызывает реактивную генерацию собственной опорной силы реакции, которая называется здесь внутренним (материальным) ускорением / реакцией. сила. Таким образом, в этом случае падения в вакууме две взаимные внутренние силы действие и противодействие присутствуют в каждом компоненте падения материя объекта. | ||
| (32) К настоящему времени мы знаем, что нет возможности напрямую измерить эти взаимно противоположные внутренние силы с помощью любого типа шкала.На этот раз «Дело в том, что , а не в целом. отчаянно … «, потому что, обеспечивая внешнюю контактную силу поддержки для объекта, предотвращающего его падение, шкала сжатия может быть вставлен между опорой и объектом, эффективно измеряя совокупная сумма бесчисленного множества объектов, которые сейчас являются силами внутреннего действия Земли 2-го типа. гравитация. Установлю это размеренное не ускорение / действие сила гравитационного веса объекта, равная 12 фунтам. | ||
| (33) Что же тогда с падающим предметом? ускорение / сила реакции? Есть ли способ замены на внешняя (контактная) сила, наличие которой также может быть обнаружено измерение? Предположим, вместо того, чтобы позволить объекту ускоряться на 32 фут / с / с при падении в вакууме из-за внутреннего типа 1 12 фунтов ускорение / действие силы земного тяготения, которое, как известно, присутствует, мы заставляем объект ускоряться по горизонтали в вакууме с той же скоростью 32 фут / с / с посредством приложения горизонтально направленной силы накопления внешних по отношению к материи 3-го типа, которая по формуле Ньютона, F = m * a, составляет 384 фунта (12 фунтов).Миниатюрная шкала сжатия может быть вставлена в точка контакта, где эти горизонтальные 12 фунтов внешнего ускорения / действия к объекту прилагается сила. Здесь мы признаем, что внешняя сила, которую объект воздействует на другую сторону шкала представляет собой 12 фунтов кумулятивной суммы бесчисленного множества внутренних ускорений / сил реакции объекта 2-го типа. Снова через внешнюю силу замену другой внутренней силой, на этот раз внутренней ускорение / сила реакции, обнаружила свое присутствие через прямое измерение. | ||
| (34) Оглядываясь на оригинал падение в вакууме, теперь мы можем обсудить это общее пара действие / противодействие внутренних ускоряющих сил с уверенностью прекрасно зная, что наличие каждого из них поддается прямому измерению с помощью техники подмены внешней (контактной) силы. Здесь это еще один инструмент, который мы можем добавить в наш набор инструментов для исследования универсальной физики. | ||
| (35) Что насчет круговых событий, если они направлены внутрь? (центростремительный) Внутреннее ускорение типа 1 / силы действия, генерируемые внутри компоненты вещества вращающегося объекта вызывают немедленное реактивная генерация в рамках одних и тех же компонентов направленного вовне (центробежного) Внутреннее ускорение типа 1 / силы реакции опоры? Может ли наш Тип 3 инструмент для замены внешней силы штабелирования дает свои присутствие, а также во время событий линейного ускорения? | ||
| (36) Ответ однозначно положительный.В Проблемы, присущие такому тесту, многочисленны. Например, обычный событие, при котором центростремительное ускорение объекта вызывается Типом 1 внутреннее ускорение / сила действия — это когда невесомый объект внутри орбитальный аппарат, такой как космический шаттл НАСА, вызван внутренним воздушным судном типа 1 сила земного притяжения ускоряется от прямой тангенциальный путь с этим ускорением, происходящим в направлении центра Земли материи в то время как невесомый объект вращается вокруг Земли по круговой траектории с довольно постоянной скоростью и довольно постоянное расстояние от центра Земли.Прямое измерение величины сила земного притяжения, возникающая в компонентах объекта возможно, но не практично. Представьте, что объект выпущен из тело орбитального аппарата и вынужден «остановиться» тягой от носовой обтекатель небольшая ракета, так что орбитальная скорость объекта вокруг Земли равна нулю. Затем маленькая ракета перенаправляется так, чтобы ее тяга к объекту была направлен вверх и достаточно, чтобы высота объекта над землей центр материи остается неизменным расстояние как его прежнее орбитальное радиальное расстояние.Теперь с уменьшительным шкала сжатия вставлена между носом ракеты и объектом, это возможно эффективное измерение величины объекта типа 2 без ускорения / действия силе земного притяжения противодействует неускорение / действие 3-го типа суммирующая сила тяги от ракеты. | ||
| (37) Другой, еще менее практичный метод прямого измерение внутренней силы гравитации Земли объекта в этом Событие орбитального объекта — построить невероятно высокую башню, установленную на горизонтальные рельсы, установленные на экваторе Земли с востока / запада направление.Заставляя башню двигаться в западном направлении на скорости около 1000 миль / час, чтобы отменить эффект вращения Земли, верхняя башни может использоваться для поддержки «остановившегося» объекта на такое же положение постоянной высоты, как и у небольшой ракеты в предыдущем мероприятии. Здесь шкала сжатия вставлена между объектом и верхней частью невероятно высокий (и невероятно безмассовый, чтобы не вносить вклад в гравитационное силы присутствуют) башня снова будет эффективно измерять величину Тип 2 неускорения объекта / Действие силы земного притяжения.Этот время сила противодействия — это неускорение / сила действия Земли 2-го типа. объектная гравитация. Эти две внутренние силы активно действуют генерируется в материи объекта, а материя Земли будет накапливаться за счет эффекта суммирования сил для достижения максимального внешнего (контактные) силы складывания, присутствующие с каждой стороны шкалы сжатия. | ||
(38) Точный, практичный, но непрямой метод для проверки силы земного притяжения объекта — это использование Ньютона. формула взаимного тяготения двух объектов в направлении каждого Другие. Формула Ньютона для универсального
Гравитация За тщательное нанесение его формулу, см. Вопрос 4 относительно орбита A.C.E. спутник. | ||
| (39) Для нашего упражнения здесь достаточно согласны с тем, что мы определили несколькими способами величину внутренняя сила земного притяжения, вызывающая невесомость искривленная траектория объекта на орбите Земли, пока он находится внутри корпуса орбитального аппарата.В поставленная задача — заменить внешнюю (контактную) силу такой же величина, которая впечатляется под прямым углом к движению объекта через космос. Только на этот раз приближающийся объект будет находиться в глубоком космос вдали от любого большого тела. Пока скорость объекта орбиты орбитальной оси остается такой же, как скорость, которой он обладал, когда он следовал по своей орбите Ось Земли, здесь, в глубоком космосе, когда Земля отсутствует, благодаря применению этого Внешнее (контактное) ускорение типа 3 / сила суммирования действия любым способом справа угол к движению объекта и направлен к указанной орбитальной оси, объект снова испытает центростремительное ускорение, заставляющее его двигаться по довольно круговой траектории вокруг воображаемая ось, расположенная там, где существовала бы ось Земли, если бы Земля была настоящее время.Здесь используя внешнюю (контактную) силу Типа 3, заменяющую внутреннюю гравитационную центростремительное ускорение / сила действия, добавляя крошечный масштаб сжатия между вращающимся объектом и вторым объектом (ракета?), прямое измерение кумулятивной суммы объекта внутренне генерируемый, направленный наружу (центробежный) Тип 1 теперь повернутый Становится возможным ускорение 2-го типа / силы реакции. (Для полного объяснение различий между силами типа 1 и типа 2, внутренними по отношению к материи, и типа 3 и 4 типа, внешние по отношению к материи, см. Статью IV. Природа силы.) | ||
(40) Математическая проверка направленная внутрь (центростремительная) внешняя (контактная) сила, необходимая для того, чтобы вызвать наш тестовый объект ускоряется, чтобы вращаться вокруг этой воображаемой оси в глубоком космосе в данное радиальное расстояние можно найти с помощью формулы Ньютона Абсолютная сила = Масса x скорость 2 / радиус. Если вместо ответа в абсолютных единицах силы, таких как фунтал или ньютон, вы предпочитаете ответ в более общепризнанных единицах силы фунт.f или kg.f тогда формула: сила = масса x скорость 2 / радиус / г. При 32 фут / с / с или 9,8 м / с / с g — приблизительное преобразование фунта до фунт-силы или от Ньютона до кгс. | ||
| (41) Понимание ускорения движущегося по орбите объекта, следование круговой траектории может сбивать с толку. Поскольку ускорение — это изменение скорости и скорости — это скорость плюс направление, любое изменение скорость, при которой объект, движущийся по линейной траектории, представляет ускорение в то время как любое изменение направления, в котором объект следует изогнутой траектории также представляет собой ускорение.Непонятная часть ускорения в круговом событии это ускорение называется центростремительным или направленный внутрь. Хотя это правда, это утверждение без объяснения причин, вселяет в сознание читателя ложные ожидания. На основе наших понимание ускорения в линейных событиях, где, если ускорение находится в прямом направлении, ускоряющийся объект всегда будет рисовать ближе к неподвижным объектам впереди, когда читатель циркуляра сообщается, что ускорение орбитального объекта центростремительное или направленный вовнутрь, для читателя логично предположить, что со временем радиус орбиты объекта будет уменьшаться по мере того, как объект направлен внутрь центростремительное ускорение заставит его приблизиться к оси. Обратное предположение предсказывает, что если вместо этого объект радиус орбиты увеличивается, затем направленный наружу центробежный теперь должно присутствовать ускорение. Сбитый с толку читатель может даже заключают, что направленное наружу центробежное ускорение вызывает действие сила также должна присутствовать. Отсутствие надлежащего объяснения и понимание, наш читатель был обманут своей собственной логикой. | ||
| (42) Проблема здесь в ложном ожидании читателя, что Направленное внутрь ускорение при круговом событии автоматически предсказывает что уменьшение радиуса орбиты ускоряющегося объекта будет происходить.Решение состоит в том, чтобы взглянуть на центростремительное ускорение с точки зрения Исаак Ньютон сделал во время своего анализа такого события. Первый Ньютон думал об объекте как о бессильном перемещающемся по линейному пути с постоянной скорость. (В Universal Physics это бессильное событие представлено как неактивное состояние объекта по умолчанию, состояние покоя-движения, где нет ускорение / сила действия.) Затем Ньютон применил направленная вбок сила на объект, заставляющая его отклоняться от этот линейный путь.По мере удаления объекта линейный путь ссылка стала линией, касательной к новому изогнутому пути объекта путешествовать. Сначала прямая касательная траектория была эффективным опорная линия, по которой измеряется ускорение объекта. выезд. Но через короткое время Ньютон обнаружил, что касательная траектория утратила свою полезность в качестве опорной линии ускорения, поскольку удаляющийся объект даже заходит так далеко, что движется задним ходом направление на обратной стороне круга.Ньютон решил эту проблему путем многократного перерисовки касательной базовой линии по окружности, чтобы все более короткие интервалы времени отправления объекта. Здесь Ньютону стало ясно, что ускорение объекта было представлен физическим отходом от линии касания с возрастающей скоростью, а не физическое приближение к центру или оси нового изогнутого пути движения. | ||
| (43) В линейном событии, таком как ускорение драгстера от начало заканчивать естественно и правильно думать о драгстере как о ускоряясь к приближающейся финишной черте.Это в равной степени правильно, чтобы распознать драгстер, ускоряющийся от вылетающего начальная линия. В круговом событии, заявив, что ускорение направлено вовнутрь или центростремительно, неверно ожидать ускоряющий объект, чтобы сделать какое-либо усилие для приближения к оси, но он правильно ожидать, что ускоряющийся объект будет удаляться с возрастающей скоростью от касательной базовой линии. По этой причине я люблю ссылаться на к ускорению в круговых событиях как к направленному «от прямого путь движения, многократно проведенный по касательной к изогнутой траектории объекта путешествовать.»Думать об ускорении в круговых событиях таким образом заключается в обновлении своей логики, чтобы она соответствовала логике, используемой Исааком. Ньютон. | ||
| (44) Следующее, что нам предстоит рассмотреть, — это событие, в котором движущийся по орбите объект Радиус увеличивается по мере удаления объекта от оси на более удаленную орбиту. Свидетельствует ли это поведение о наличии направленное наружу центробежное ускорение, вызванное чистым направленным наружу центробежная сила действия? Все, что требуется для достижения правильного понимание заключается в изучении пути объекта.Хорошее и обычное мероприятие это тот, где вы ведете машину по кругу в большая пустая автостоянка. Если смотреть сверху, против часовой стрелки путь вашего автомобиль изогнут внутрь влево, указывая на то, что, поскольку прямолинейный путь не преследуемое, направленное внутрь (центростремительное) ускорение, вызванное Ускорение, направленное внутрь / Присутствует сила действия. Этот вызывающая событие сила действия вызвана направленным внутрь дорожным покрытием. толкнуть передние колеса автомобиля, повернутые влево.В результате определенная скорость направленного внутрь ускорения вдали от касательной точки отсчета линий. | ||
| (45) Теперь поверните руль машины вправо, что немного ближе к прямой. Автомобиль сразу начнет поворачивать большего диаметра круг на стоянке. Вид сверху все еще показывает путь должен быть загнут внутрь влево только теперь кривая меньше произносится.Вызывающая событие сила воздействия от тротуара все еще центростремительно направленный, только меньший по величине. Скорость Ускорение, направленное внутрь, также меньше. Но самое главное это все еще больше нуля. Здесь вы можете легко увидеть, что направленный вовне «центробежного ускорения» не происходит. Вместо этого пока поскольку путь автомобиля поворачивает влево, внутрь «центростремительное» ускорение продолжится. | ||
| (46) Что происходит, когда вы возвращаете передние колеса на прямую положение впереди? Направленное внутрь центростремительное ускорение прекратится, когда ваш автомобиль покидает круг, чтобы следовать по прямому пути касательной базовой линии.По-прежнему нет никаких признаков «центробежного ускорения». Поверните руль колесо немного вправо от прямой, и теперь тротуар начнет форсировать автомобиль, чтобы отклониться вправо от касательной базовой линии. Центростремительное ускорение снова происходит только на этот раз. вправо, когда машина начинает движение по часовой стрелке вокруг полностью новый круг. Опять нет «центробежного ускорения» и самое важно отсутствие направленного наружу «центробежного» ускорения, вызывающего сила действия присутствует.Только изменение ставок и направлений направленное внутрь центростремительное ускорение, вызванное изменением величин и Направления направленного внутрь центростремительного ускорения / силы воздействия равны настоящее время. | ||
| Заключение I: (47) Не существует такого события, как направленное вовне «центробежное ускорение». Также нет силы способный действовать как причина такого воображаемого несобытия, как «центробежное ускорение». | ||
| (48) Если вы считаете, что приведенный выше вывод очевиден, оставляя вас интересно, почему я посвятил этому вопросу время и силы, осознаю, что Эрнст Мах и Альберт Эйнштейн оба приняли нелогичное убеждение, что «центробежное ускорение» реально. Тем не менее, как бы событие устраивается, даже если орбитальный объект получает помощь от тяги бортовая ракета, направленная наружу, только центростремительное ускорение в результате будут разные ставки и направления.Исследование орбиты путь объекта — это все, что требуется для осознания этой истины. Именно по этим причинам не существует теста, который мог бы доказать, что «центробежный ускорение «возможно. С этим пониманием приходит осознание того, что, несмотря на их умственные усилия в этой области, оба Эрнста Маха и мысленные эксперименты Альберта Эйнштейна относительно прядения Было показано, что событие «вращающаяся Вселенная» не имеет реальной ценности. | ||
| (49) Вы заметили, что в этом исследовании природы силы реакции только ускорение / силы реакции обсуждались? А что же тогда с неускоренными событиями, например, когда вы толкаете горизонтально направленная сила воздействия на столб забора? Разве это не Столб ограждения, отталкиваясь назад с равной и противоположной силой реакции вызвано вашей силой действия, вызывающей событие? Ответ может удивить вас.Чтобы признать правду во всех таких насильственно вызванных неускоренные события, все, что нужно сделать, это принять беспристрастный позиция универсального наблюдателя. | ||
| (50) В то время как нисходящие и восходящие силы гравитации играют роль в мероприятии «столкновение с забором», я сосредоточу наше внимание на присутствующие горизонтально направленные силы. В то время как сила действия ваш толчок уже был идентифицирован как отпечатанный по горизонтали против столба, что, если вместо того, чтобы пытаться сместить столб забора, ваш Намерение состояло в том, чтобы выполнить какое-то горизонтально направленное мероприятие с вашим ноги? Предположим, вы просто упираетесь в столб забора. руками, действительно пытаясь предотвратить попадание бревна на наклонная плоскость от скатывания в вашу сторону.Тогда вы могли бы быть склонным сказать, что сила действия в этом событии впечатляет ваши ноги против бревна. Беспристрастная правда в том, что и сила от ваших рук против столба забора и силы ног против Бегущий бревно — это силы действия. Это верно во всех таких горизонтально-направленные события, при которых ускорение отсутствует. В неускоренное событие, когда вызывающее событие неускорение / действие сила воздействует на объект как внешняя контактная сила в одном направление, всегда присутствует вызывающее событие не ускорение / действие сила, оказываемая объектом как внешняя контактная сила в противоположном направление. | ||
| (51) Мы согласны с тем, что сила, приложенная вашими руками к столб забора и сила, оказываемая вашими ногами на бревно, являются силами действия, вызывающими событие. С этого момента я попрошу вас изучите цикл действия силы, ища наличие реакции сила. Чтобы упростить ситуацию, скажем, что бревно теперь скейтборд. который привязан веревкой к основанию столба забора.Ваша сила действия толчок к столбу пытается сместить его в одном направлении, в то время как ваш сила действия толкнуть скейтборд пытается сместить скейтборд в противоположное направление. Натяжение веревки предотвращает любое событие. не происходить, обеспечивая канал, так что каждая сила воздействия может зацикливаться вокруг, чтобы противостоять другой силе действия. Силы реакции нет. настоящее время. Откуда мы знаем, что это правда? Если бы была реакция присутствующие силы, тогда они фактически удвоили бы имеющиеся силы в любой момент.Поскольку силы действия петли полностью учитывают присутствуют все горизонтальные силы, в этом случае просто нет места для добавление одной или нескольких сил противодействия. Эту истину можно принять как доказательство того, что ничего не существует. | ||
| (52) Для более ясного объяснения Цикла силы действия (еще один инструмент для нашего инструментария Force Investigation Toolbox) считают, что вы выбрали гибкий пластиковую трубу и положил ее горизонтально на плоский лист фанеры так, чтобы труба образует круг, где его концы соприкасаются, так же, как вы могли бы образовать круг прикоснувшись кончиком указательного пальца к кончику большого пальца на та же рука.Теперь отделите концы трубы на расстоянии 1 фут. и закрепите трубу на фанере. Затем, используя соответствующий размер шариков скатайте столько, сколько нужно, чтобы заполнить трубу так, чтобы только полдюйма свободное пространство существует на каждом конце. Теперь медленно толкайте шарики в одним концом пальцем одной руки, медленно нажимая на шарики на другом конце пальцем другой руки. Надеюсь, это мраморное событие поможет вам понять, что в Action Force Loop никакой реакции силы присутствуют.Это связано с тем простым фактом, что каждое действие действующей силе в равной степени противостоит другая сила действия настоящее время. | ||
| Заключение II: (53) Силы ускорения / реакции являются единственными силы реакции, существующие в природе. Силы ускорения / реакции присутствует во всех ускоренных событиях, например, в линейных события, при которых скорость движения объекта изменяется, или циклические события где направление движения объекта меняется.Силы реакции больше нигде не существует. Это означает, что пока не ускорение / действие существуют силы, такие как сила n-a / A, которую вы воздействуете на каждый конец заполненный мрамором Action Force Loop, нет такой вещи, как «сила реакции неускорения». | ||
| (54) Теперь, когда мы достигли этого ускорения / силы реакции Заключение, поймите, что до Универсальной физики не было никакого доверия. отводится этой роли силы реакции.В круговых событиях направленное наружу ускорение / сила реакции правильно называется центробежной в то время как неправильно названный «фиктивным». В линейных событиях ускорение / сила реакции полностью игнорируется неправильным теория ускорения «чистой» силы, поддерживаемая полуправдой техника рисования схемы свободного тела. Что это за наука нужна вся правда, а не половина. | ||
| (55) Космонавт стоит на шкале сжатия внутри ракеты. который вот-вот начнет свой разгон со стартовой площадки на мысе Канаверал, Флорида, США.Незадолго до зажигания ракет внешнее по отношению к материи (контакт) заставить космонавт свободно опирается на весы — 165 фунт-сила-сила. гравитационного масса. Через некоторое время после старта, когда ракета выбрасывает горючее, ее скорость разгона достигает максимума. Теперь внешняя сила космонавт свободно опирается на шкалу, равную 825 фунт-сила. Пока Современные физики связывают новый вес космонавта с его гравитационным вес обратно на стартовой площадке, ссылаясь на его новый вес в ускоряющая ракета как равная пяти гравитационным весам, нет удовлетворительное объяснение дополнительных направленных вниз 660 фунтов.ж дано. Дополнительные направленные вверх 660 фунт-сила-сила — это нет тайна. Роль этой силы ускорения / действия выполнена идеально. ясно по формуле Исаака Ньютона F = масса * ускорение. Но взаимная сила реакции в 660 фунтов, вызванная 660 фунтами-футами. ускорение / сила действия, скорее как ускорение / сила реакции отражаясь от ускоряющееся тело космонавта не признается в учениях современной науки. Физика. Вместо этого используется метод «диаграммы свободного тела». используется, чтобы скрыть это общее непонимание. | ||
| (56) Чтобы прийти к истине, все, что нужно сделать, это признать, что сила от ракеты должна быть силой действия, и поскольку действие не Силовая петля существует, тогда поддерживающая сила должна быть реакцией сила. Поскольку 660 фунтов силы действия ракеты вызывают ускорение космонавта это означает, что эта часть силы действия является ускорением / действием сила. Поскольку поддерживающая сила реакции от космонавта всего присутствует во время ускорения космонавта, а затем всегда соответствует переменное ускорение / сила действия ракеты, можно с уверенностью заключить, что 660 фунтов.направленной вниз силы реакции космонавта ускорение / сила реакции. Правда в том, что теперь внешняя сила веса, который ускоряющийся космонавт свободно держит на весах, составляет одна часть земной гравитационной силы веса (165 фунт-сила) и 4 части ускорение / сила реакции веса. Хотя оба эти направленные вниз силы принципиально внутренние (по отношению к материи) силы, здесь они проявляются как Тип 2 внутренние силы по мере того, как они складываются или достигают высшей точки для достижения максимума внешний 825 фунтов.сила веса, свободно приложенная ступнями космонавта к весам. | ||
| Заключение III (57) Единственными силами реакции, которые существуют, являются ускорение / реакция силы. Их существование вызвано событием, вызывающим силы ускорения / действия и, следовательно, никогда сами не являются причиной любое событие. Силы ускорения / реакции часто измеряются с помощью тем или иным методом во многих ускоренных событиях.Обладая обоими абсолютная величина и направление, каждый внутренний Тип 1 или Тип 2 ускорение / сила реакции — векторная величина, достойная включения в каждый рисунок ускоренного события. Имейте в виду, что как ускорение / сила реакции правила сложения векторов не применяются. Если ускорение материи присутствует, чистое ускорение / сила действия при любой данный момент может быть определен сложением векторов. Тогда вектор ускорения / реакции будет точно равен по величине и точно в направлении, противоположном вектору чистого ускорения / силы действия, поэтому определенный.Благодаря своей взаимной природе, передняя / задняя сила обеспечивает ЗАКОН III. необходимая поддержка, которая немедленно присутствует на точном месте вызывающая событие сила. Теперь показания любого сжатия и шкала натяжения присутствует разумно. Итан Скайлер | ||
Комментарий автора Итан Скайлер | ||
Уведомление об авторских правах Автор предоставляет каждому посетителю The Universal Physics Журнал имеет право сделать одну (1) копию Статьи XI для своего личного архива, если уведомление об авторских правах постоянно прикреплено к архивной копии. Нажмите здесь чтобы скачать копию статьи XI: «Силы реагирования». | ||
механика Ньютона — Где действует сила реакции? Действует ли он на центр масс?
ньютоновская механика — Где действует сила реакции? Действует ли он на центр масс? — Обмен физическими стекамиСеть обмена стеков
Сеть Stack Exchange состоит из 176 сообществ вопросов и ответов, включая Stack Overflow, крупнейшее и пользующееся наибольшим доверием онлайн-сообщество, где разработчики могут учиться, делиться своими знаниями и строить свою карьеру.
Посетить Stack Exchange- 0
- +0
- Авторизоваться Зарегистрироваться
Physics Stack Exchange — это сайт вопросов и ответов для активных исследователей, ученых и студентов-физиков.Регистрация займет всего минуту.
Зарегистрируйтесь, чтобы присоединиться к этому сообществуКто угодно может задать вопрос
Кто угодно может ответить
Лучшие ответы голосуются и поднимаются наверх
Спросил
Просмотрено 4к раз
$ \ begingroup $Я знаю, что сила реакции действует перпендикулярно поверхности, контактирующей с телом.Но где именно (на теле) он действует?
Когда мы имеем дело с силами, действующими на тела конечных размеров, мы обычно имеем в виду силу, действующую на центр масс.
На что мы ссылаемся, когда речь идет о силе реакции? Где это действует?
148k2828 золотых знаков355355 серебряных знаков17571757 бронзовых знаков
Создан 29 мар.
Кунал Павар2,86211 золотых знаков1414 серебряных знаков3232 бронзовых знака
$ \ endgroup $ 2 $ \ begingroup $Сила реакции действует в точке контакта, но для удобства расчета мы обычно принимаем ее на COM
- Если бы он действовал непосредственно на COM, то эффект опрокидывания был бы невозможен
Подумайте об этом
Создан 29 мар.
Уткарш футус37511 золотой знак33 серебряных знака1616 бронзовых знаков
$ \ endgroup $ $ \ begingroup $Любая сила имеет линию действия , и можно сказать, что вектор силы действует где угодно вдоль этой линии.Эта линия имеет направление и по крайней мере одно место в пространстве, которое необходимо полностью указать. Чтобы полностью указать силу, вам нужна линия действия и величина силы.
Контактная сила имеет направление вдоль нормали контакта и действует через точку контакта. Таким образом, это может вызвать вращение вокруг центра масс, когда линия действия смещена от COM. Геометрия контактного усилия определяется только геометрией контактирующих поверхностей.
Сила реакции определяется как любая сила , которая не действует на твердое тело.У тела нет относительного движения в направлении силы реакции. Геометрия силы реакции определяется допустимым движением (степенями свободы) тела и приложенными силами.
Например:
Тело с штифтом не имеет линейного движения в месте расположения штифта, и поэтому сила (и) реакции на штифт должна проходить через штифт (чтобы не создавать крутящего момента на штифте). Если закрепленное тело ускоряется, это происходит из-за действующей на него силы (например, силы тяжести), а не из-за сил реакции.Направление силы реакции определяется приложенными силами.
Свободное тело, контактирующее с землей, будет иметь контактную силу вдоль нормали контакта, определяемую контактирующими поверхностями. Тело не может двигаться только по нормали контакта. Таким образом, контактная сила также является силой противодействия, но линия действия задана априори, в отличие от предыдущего примера.
Создан 29 мар.
Джон АлексиуДжон Алексиу29.9k44 золотых знака5454 серебряных знака142142 бронзовых знака
$ \ endgroup $ 1 $ \ begingroup $Как сказал Ньютон, «сила противодействия» равна силе воздействия и противоположна ей. Таким образом, если сила воздействия от объекта возникает в его центре при столкновении с другим объектом, сила реакции будет направлена к его центру.
Когда гравитация тянет на объект, сила действия — это центр Земли, притягивающий центр объекта. Таким образом, сила реакции — это притяжение центра объекта на центр Земли .
Создан 29 мар.
$ \ endgroup $ $ \ begingroup $Мы всегда можем предположить, что сила действует на Центр масс.Любая Сила, действующая на твердое тело, добавляет к уравнению $ \ sum \ vec F = m \ vec a $, где $ \ vec a $ — поступательное ускорение центра масс. Это применимо независимо от того, совпадает ли сила реакции с центром масс.
В случаях, когда сила реакции не соответствует CM, она также добавляется к уравнению крутящего момента $ \ sum \ vec \ tau = \ sum \ vec F \ times \ vec r = m \ vec \ alpha $.
Создан 29 мар.
philip_0008philip_000882266 серебряных знаков1010 бронзовых знаков
$ \ endgroup $ 1 Physics Stack Exchange лучше всего работает с включенным JavaScriptВаша конфиденциальность
Нажимая «Принять все файлы cookie», вы соглашаетесь с тем, что Stack Exchange может хранить файлы cookie на вашем устройстве и раскрывать информацию в соответствии с нашей Политикой в отношении файлов cookie.
Принимать все файлы cookie Настроить параметры
Датчики| Бесплатный полнотекстовый | Косвенное измерение сил и моментов реакции земли с помощью переносных инерциальных датчиков: систематический обзор
Для оценки GRF по инерционным данным необходимо моделирование некоторых данных.Большинство методов, предложенных в самой ранней литературе, основаны на подходах обратной динамики, которые требуют биомеханического моделирования. Рассмотренные методы были разделены в соответствии с задачами анализа.
3.1.1. Ходьба и бег
Первая попытка записать кинематику и кинетику передвижения человека вне лаборатории была предпринята Ohtaki et al. [26]. Они использовали три инерционных блока, прикрепленных к дистальному положению голени и бедра с помощью липучки (рис. 2) для длительного амбулаторного наблюдения.Принятая конфигурация позволяла изучать кинематику только в сагиттальной плоскости. Более того, измерялось только движение левой ноги, а кинематика правой ноги была получена в предположении лево-правой симметрии при нормальной походке. Измерение движения одной ноги позволило: (i) исключить датчики на другой ноге, улучшив подвижность; (ii) снизить энергопотребление. Каждый инерциальный блок состоял из одноосного акселерометра (диапазон ± 5 g) и одноосного гироскопа (диапазон ± 300 град / с).Данные регистрировались на портативном компьютере, который нес в рюкзаке, пока испытуемые шли по прямой со скоростью, определяемой метрономом. Расчетные результаты сравнивались с данными, собранными OS и FP. Временные параметры походки и кинематика могли быть получены с помощью некоторого специального алгоритма, основанного на частотных компонентах ускорения. Высокие значения частоты были связаны с ударами пятки (HS), в то время как более низкие частоты были связаны с произвольными движениями тела или наклоном относительно направления силы тяжести.Сигналы подвергались фильтрации нижних частот при 10 Гц и фильтров верхних частот при 30 Гц. События удара пяткой были идентифицированы по пикам в высокочастотных компонентах, в то время как производная угловой скорости использовалась для выявления ложных срабатываний, поскольку производная скорости всегда отрицательна вокруг истинного случая контакта пятки [26]. Алгоритм также был способен идентифицировать среднее и конечное положение в фазе одиночной опоры путем обнаружения повторяющихся закономерностей в радиальном ускорении стойки. Обнаружение этих фаз показано на рисунке 3.Углы суставов рассчитывались путем интегрирования угловых скоростей пяти сегментов, составляющих модель тела, и использования стандартных антропометрических данных [27]. Модель изображена на рисунке 2 и состоит из пяти сегментов: таза, бедер и голени. Полная сила реакции опоры на каждую ногу была определена с помощью обратного динамического анализа, основанного на рекурсивной формулировке уравнений баланса сил и моментов. Во время фазы одиночной опорной стойки общий GRF оценивался как сумма сил на каждом из пяти сегментов модели (уравнение (1)).Ускорение левой ноги оценивалось исходя из двусторонней симметрии (уравнение (2)).Fstance = ∑i = 15mi ∗ ai (t), t∈mid положение
(1)
влево (t) = вправо (t + T / 2)
(2)
где m i и a i — масса и ускорение i-го сегмента модели. T — время стойки. Ускорение вычислялось в центре масс каждого сегмента путем вращения и перемещения измеренного ускорения. Совместный момент τi вычислялся путем решения уравнений движения, а мощность вычислялась путем умножения момента и угловой скорости ωi, как в уравнении (3): Этот метод оказался способным определять временные параметры в соответствии с движением стопы, кинематическими данными и силами реакции опоры [26], хотя наблюдалось некоторое отклонение по сравнению с OS.Максимальная RMSE составляла 11,2 ° для углов и 0,31 N / BW для GRF (GRF были нормализованы по массе тела). Однако были соблюдены некоторые ограничения. Во-первых, в нем использовалась значительно упрощенная модель человеческого тела и стандартные анатомические параметры. Использовались только одномерные датчики, а анализ ограничивался сагиттальной плоскостью. Это внесло неточности в оценку кинематических параметров, которые распространялись на вычисление сил. Более того, анализ был ограничен фазой одиночной поддержки.В фазе двойной опоры, когда обе ноги касаются земли, кинематическая цепь неопределенная и уравнения движения не могут быть решены [20]. Другие источники ошибок были связаны с артефактами мягких тканей из-за фиксации сенсора [26]. Предлагая обоснованный подход к оценке GRF, этот метод имел некоторые серьезные ограничения, которые были частично преодолены в последующих исследованиях. Другой подход был предложен Neugebauer et al. [28], которые использовали статистическую модель для оценки пика вертикальной составляющей GRF во время ходьбы и бега.Данные регистрировались с помощью недорогого двухосного акселерометра, обеспечивающего частоту дискретизации 40 Гц и диапазон измерения ± 7 g. Датчик был закреплен на наиболее латеральной стороне гребня подвздошной кости правого бедра, и он измерял максимальное ускорение, зарегистрированное по двум осям. Оценка максимальной силы реакции земли во время опорных фаз была основана на статистической модели, основанной на повторных измерениях и регрессии со смешанными эффектами. Такая модель ищет линейную или логарифмическую связь между двумя переменными, принимая во внимание влияние нескольких различных факторов, выраженных в иерархической форме [29].В этом случае модель была основана на предположении, что пол, масса тела и тип передвижения были хорошими факторами, предсказывающими взаимосвязь между ускорением и GRF. Это предположение было основано на фундаментальных уравнениях движения, в которых GRF является функцией массы, инерционных свойств сегментов тела и ускорения частей тела [28]. Анализ данных показал, что масса тела действительно была хорошим предиктором, а логарифмически преобразованный пиковый GRF был хорошо предсказан с использованием модели смешанного эффекта.Средняя абсолютная разница между предсказанной GRF и той, которая была измерена непосредственно силовой пластиной, составила 9%, в то время как максимальная наблюдаемая ошибка составила 17,5% [28]. Однако этот подход имел несколько ограничений, в основном из-за используемого датчика. Тип датчика и его расположение не позволяли измерять пространственно-временные параметры, а также временные профили GRF. Кроме того, в методе использовался статистический подход, а не более подробная биомеханическая модель, поэтому многие анатомические особенности испытуемых не были приняты во внимание.Таким образом, метод может не подходить для занятий, предполагающих концентрированные и повторяющиеся нагрузки, таких как прыжки или во время тренировки. Те же авторы исследовали этот метод в своей последующей работе [30]. Они регистрировали ускорение с помощью 3-осевого акселерометра, расположенного, опять же, на самой боковой стороне талии, над правым гребнем подвздошной кости. Это новое устройство могло записывать данные с частотой дискретизации 100 Гц, а максимальный диапазон составлял ± 6 g. Целью работы было вычисление пикового GRF по ускорению, зарегистрированному в бедре, с использованием математической модели, основанной на линейной регрессии [30].Авторы обнаружили, что ускорение, измеренное с помощью акселерометра, установленного на бедре, может не дать точного представления о нагрузке, воспринимаемой телом. Фактически было обнаружено, что разработанная модель недооценивает пиковый GRF, особенно в тех задачах, которые связаны с более высоким пиковым GRF, таких как бег. Более того, авторы заметили, что в некоторых случаях пиковое ускорение бедра во время бега может быть выше ± 11 g [30], что насыщает диапазон акселерометра ± 6 g. Таким образом, этот подход следует использовать с осторожностью и следует отдавать предпочтение другим конфигурациям акселерометра.Другой метод оценки пикового GRF во время бега — это метод Wundersitz et al. [31], в которых использовался только трехосный акселерометр, закрепленный на верхней части тела. Фундаментальная гипотеза заключалась в том, что пик GRF при беге вызван столкновением стопы с землей [32] и, поскольку масса постоянна, измеренное ускорение пропорционально силе [33]. Датчик размещался на верхней части тела, поскольку в предыдущих исследованиях подчеркивалось, что датчик следует размещать таким образом, чтобы как можно меньше влиять на работу спортсмена [34,35].Использование трехкоординатного акселерометра вместо одноосного обеспечило повышенную чувствительность к ударному ускорению за счет повышенной поперечной чувствительности [31]. IMU, использованный в [31], состоял из 3-осевого акселерометра, диапазон ± 8 g, частота дискретизации 100 Гц. Датчик фиксировали в центре верхней части спины на уровне второго грудного позвонка, как и в предыдущих исследованиях [36]. Основная ось акселерометра проходила в черепно-каудальном направлении и почти эквивалентна глобальной вертикальной оси [31].Пиковое значение GRF, оцененное этим методом, сравнивалось с выходом силовой пластины, в то время как испытуемые выполняли несколько беговых заданий и задания с изменением направления [31]. Было доказано, что сглаживание сигнала ускорения необходимо для получения надежных данных, и предполагается, что оптимальная частота нижних частот составляет 10 Гц. При использовании низких частот пиковое значение GRF, оцененное акселерометром, было сравнимо с величиной, непосредственно измеренной силовой пластиной. После нескольких испытаний акселерометры могут обеспечить приемлемую меру силы удара.Абсолютная погрешность единичного измерения составила ~ 24%. Таким образом, было рекомендовано сглаживание данных. Аналогичный подход был предложен Charry et al. [37], в которых использовался трехосевой акселерометр, закрепленный на медиальной части большеберцовой кости каждой ноги. Ускорение большеберцовой кости измерялось во время бега. Этот подход был основан на предыдущей работе, в которой большеберцовый шок оценивался количественно, исходя из линейной зависимости между большеберцовым осевым ускорением и пиковым GRF [38]. Два имеющихся в продаже акселерометра имели диапазон ± 24 g, частоту дискретизации 100 Гц и были закреплены на обеих большеберцовых костях вдоль оси большеберцовой кости в средней точке между нижним краем медиальной лодыжки и линией медиального сустава колена.Прямое измерение GRF с помощью силовой платформы использовалось для сравнения. Из записанного профиля ускорения большеберцовой кости можно было идентифицировать четыре события: (i) удар пяткой; (ii) начальное пиковое ускорение; (iii) Максимальное пиковое ускорение и (iv) Пиковое ускорение. Авторы обнаружили, что логарифмическая аппроксимация лучше всего приближает корреляцию между ускорением и пиковым GRF. Затем этот метод можно использовать для определения фаз ходьбы по сигналу ускорения. Ошибка RMSE в логарифмической оценке GRF от ускорения по сравнению с прямым измерением с силовой пластины достигла в среднем ~ 150 Н для разных скоростей движения [37].Meyer et al. [39] изучали применимость метода на основе акселерометра для измерения GRF у детей. Выполнялись следующие задания: ходьба, бег трусцой, бег, приземление из боксов высотой 10, 20 и 30 см, прыжки со скакалкой и танцы некоторых движений брейк-данса. Силы реакции грунта одновременно регистрировались силовыми пластинами. Во время тестов дети носили на правом бедре два различных имеющихся в продаже трехосных акселерометра. Частота дискретизации составляла 100 Гц и максимальный диапазон ± 8 г и ± 6 г соответственно.GRF, измеренный с помощью FP, составлял: 1,3-кратную BW для ходьбы, 2,2 BW для бега трусцой, 2,8 BW для бега. При приземлении с разной высоты измеренные силы составили: 4,2 BW для 10 см, 5,2 BW для 20 см, 5,9 BW для 30 см. Корреляция между FP и измеренными ускорениями была очень высокой (R = 0,90). Пол, возраст, вес, рост и длина ног детей не оказали существенного влияния на коэффициенты корреляции. Несмотря на высокую корреляцию между применяемыми методами, оба акселерометра систематически завышали GRF, и смещение измерения увеличивалось с нагрузкой [39].Хотя данные акселерометра хорошо коррелировали с измеренным GRF, авторы рекомендовали с осторожностью использовать акселерометры, когда требуется абсолютное измерение силы. Авторы также подчеркнули важность использования адекватной частоты дискретизации, которая должна как минимум вдвое превышать скорость самого быстрого движения [40]. Частоты обычных физических нагрузок, не связанных с ударами, у людей обычно ниже 8 Гц [41], но во время пиковых контактов (например, при беге) частоты могут быть выше [39].Максимальные диапазоны ± 8 г и ± 6 г также могут быть ограничивающими для очень высоких ударных нагрузок, в то время как значения в диапазоне от 2 г до 4 г наблюдались при выполнении обычных задач. Доказано, что таких значений ускорения достаточно, чтобы вызвать благоприятные структурные изменения прочности костей [42,43]. Более сложный подход — подход, предложенный Yang et al. [44], которые разработали метод оценки сил и моментов нижних конечностей при ходьбе с использованием кинематического устройства слежения. Этот метод был нацелен на использование для клинического анализа ходьбы в клинических условиях без необходимости использования специальной лаборатории или дорогостоящих инструментов.Исследование было направлено на ходьбу, так как это наиболее распространенный вид деятельности, являющийся объектом клинических исследований у людей с двигательными травмами. Авторы разместили гироскопы в центрах масс туловища, бедер, голеней и ступней, чтобы измерить соответствующие угловые скорости, в то время как акселерометры были размещены на ступнях для измерения их линейного ускорения. В отличие от предыдущих методов, этот был направлен на измерение трехмерного пешеходного движения, а это означает, что кинематика во фронтальной и поперечной плоскостях учитывалась в дополнение к сагиттальной плоскости.Поскольку целью работы было оценить не только GRF, но и межсегментарные силы на нижнюю конечность, потребовалась подробная биомеханическая модель. Механические свойства (масса и инерционный момент) были присвоены каждому сегменту модели на основе стандартных значений, указанных в литературе [44]. Угловые положения и ускорение бедер, колен и лодыжек были получены путем интегрирования и дифференцирования измеренных угловых скоростей. Цикл ходьбы был идентифицирован и сегментирован по угловому положению ступней (рис. 4).Этот анализ позволил идентифицировать условия поддержки ног: (i) ранняя двойная поддержка; (ii) одинарная опора; (iii) поздняя двойная поддержка. Эти фазы были идентифицированы по моментам начального контакта и отрыва, которые, в свою очередь, были идентифицированы непосредственно с IMU [44]. Используя преимущества IMU, размещенных на сегментах тела и зная массу каждого сегмента, силу каждого межсегментарного сустав был рассчитан. Начиная с бедра, силы на каждом суставе нижней конечности были впоследствии рассчитаны путем суммирования нагрузки, обнаруженной на верхнем сегменте, как показано в уравнениях (4) — (8).Последними вычислялись силы на пятку и фалангу. Сила, действующая на другое бедро, а именно fL-hip, оценивалась с помощью экспоненциальной передаточной функции [44].fR − hip = mtrunk (atrunk − g) −fL − hip
(4)
fR − колено = fR − бедро + m бедра (бедро − g)
(5)
fR-голеностопный сустав = fR-колено + мопс (ashank-g)
(6)
fR − стопа = fR − пятка + fR − ph = fR − лодыжка + mfoot (afoot − g)
(7)
fR − ph = sfR − foot an fR − heel = (1 − s) fR − foot, где s = lPClfoot
(8)
где lPC — расстояние между центром давления и пяткой, lfoot — длина стопы.Силы на пятке и фаланге, оцененные этим методом, сравнивались с силами, измеренными с помощью датчиков нагрузки, размещенных под ботинком. Биомеханическая модель показана на рисунке 5. Расчетные силы оказались в хорошем согласии с измеренными (рисунок 6), наблюдалась хорошая корреляция между двумя сигналами (R> 0,95) и относительно низкая максимальная RMSE ~ 66 Н. Метод, предложенный [44], был более сложным, чем предыдущие, поскольку в нем использовались семь IMU и улучшенная трехмерная биомеханическая модель, но он позволял оценить максимальный GRF без необходимости использования силовых пластин и оценок межсегментарных сил без необходимость использования инвазивных датчиков.Однако слабость этого подхода заключалась в оценке сил во время фазы двойной опоры, поскольку распределение силы между двумя ногами оценивалось с помощью статистического подхода. Карацидис и др. [45] также разработали метод прогнозирования как GRF, так и GRM во время ходьбы, используя только кинематические данные от IMU, и они попытались преодолеть проблему неопределенности в фазе двойной поддержки, используя алгоритм распределения, основанный на предположении о плавном переходе. Авторы использовали инерциальную систему, состоящую из 17 IMU, установленных на облегающем костюме, ориентиры датчиков которого показаны на рисунке 7.Частота дискретизации 240 Гц. Выходные данные IMU сравнивались с выходными данными ОС и FP. Кинематика 23 анатомических сегментов, составляющих модель, была реконструирована с использованием сигналов ускорения, полученных от IMU. Исходя из кинематических и инерционных свойств каждого сегмента, общая внешняя сила была оценена по уравнению движения Ньютона (9), [46]. Точно так же полный внешний момент был вычислен по уравнению Эйлера (уравнение (10)).Fext = ∑i = 1Nmi (ai − g)
(9)
Mext = ∑i = 1N [Jiω˙i + ωi × (Jiωi)] — ∑i = 1N∑j = 1Ki (rij × Fij)
(10)
где Ki — количество конечных точек в каждом сегменте, ωi — угловая скорость i-го сегмента, Ji — тензор инерции вокруг центра масс i-го сегмента, rij — плечо рычага между центром масс. и приложенная сила Fij. Инерционные параметры каждого сегмента были рассчитаны на основе масштабированных антропометрических данных, как предложено в [27].Во время фазы одиночной опоры GRF вычислялся, как и в предыдущих методах, в то время как GRM вычислялся, принимая плечо рычага применяемого GRF как проекцию голеностопного сустава на землю. Во время двойной поддержки решение уравнения Ньютона является неопределенным, поэтому авторы реализовали алгоритм распределения, основанный на функции предположения о плавном переходе, построенной на эмпирических данных [45]. Функция, проиллюстрированная на рисунке 8, зависит от времени походки и использовалась для распределения силы и моментов между двумя ногами во время фазы двойной опоры.Фазы одинарной и двойной опоры были идентифицированы с помощью алгоритма обнаружения событий походки. Процедура была основана на пороговом уровне, применяемом к норме скоростей пятки и носка [45]. Расчетные GRF и GRM сравнивались с теми, которые измерялись с помощью OS и FP на протяжении трех подфаз цикла ходьбы: (i) первая двойная опора; (ii) вторая двойная опора; (iii) одиночная опора для каждой стопы. Было обнаружено, что системы инерционного и оптического захвата движения имеют схожие характеристики при оценке GRF и GRM по сравнению с силовыми пластинами золотого стандарта.Наибольшие ошибки RMSE для GRF наблюдались для латеральной составляющей силы. Худшие результаты были при оценке боковой силы в задаче «быстрая ходьба», которой соответствовало RMSE 14,6%. Максимальное значение RMSE для GRM составило 30,6%, и оно наблюдалось для фронтальной силы в задаче «быстрая ходьба» [45]. Что касается фаз шага, наибольшие ошибки наблюдались в фазах двойной поддержки.В целом, оценка переднего и вертикального GRF, а также сагиттального GRM была лучше, чем у бокового GRF и фронтального и поперечного GRM.Это объяснялось меньшей величиной боковых мер, которые имеют относительно большое влияние на окончательные оценки.
У этого метода были некоторые ограничения. Во-первых, оценка GRF во время двойной поддержки имела низкую точность из-за того, что предположение о плавном переходе было основано на эмпирически выведенных кривых, полученных от здоровых субъектов, поэтому этот метод не подходит для людей с двигательными расстройствами. Во-вторых, этот метод может быть неточным для более медленных или более высоких скоростей ходьбы, бега или ненормальной ходьбы, когда требуется более сложная модель распределения силы.В-третьих, механические свойства каждого сегмента были основаны на усредненных антропометрических данных, которые могут не отражать правильно пожилые или тучные группы населения [48,49]. Наконец, есть некоторые внутренние проблемы при использовании инерциальных датчиков, в основном из-за магнитных помех и артефактов мягких тканей. Этот метод был основан на протоколе всего тела с 17 IMU, и уменьшение количества датчиков может сделать систему более практичной для клинической практики и использования в спорте. Оценка GRF во время двойной поддержки представляет собой наиболее серьезную проблему, когда можно полагаться только на кинематические данные.Фактически, во время двойной опоры нижние конечности образуют механическую цепь с замкнутым контуром, что делает невозможным однозначное определение GRF на каждой ноге, полагаясь только на уравнения Ньютона-Эйлера. Метод, предложенный для решения этой проблемы, представлял собой «предположение о плавном переходе» [45], а также другие ранее разработанные математические модели для прогнозирования перехода нагрузки от ведомой к ведущей опоре [50,51,52]. В таких методах используются статистические модели, в основном основанные на эмпирических данных, для прогнозирования количества нагрузки, которая будет возложена на каждую ступню в фазах двойной поддержки.Другой метод предложен Dijkstra et al. [53], которые использовали «точку нулевого момента», то есть точку на земле, в которой горизонтальные моменты из-за внешних нагрузок равны нулю. В условиях устойчивости эта точка совпадает с центром давления. Этот метод является недорогим в вычислительном отношении и обычно используется для стабилизации двуногой ходьбы роботов [54]. Метод «Точка нулевого момента» был протестирован на кинематических данных, полученных от оптоэлектронной системы, силовых платформ и модели тела OpenSim [55].Было доказано, что оцененный GRF был точным в вертикальном и латеральном направлениях, в то время как силы в переднем заднем направлении были недооценены, что также приводило к неточностям в оценке суставных моментов [53]. Gurchiek et al. [56] провели технико-экономическое обоснование использования одного IMU, размещаемого на крестце. IMU был помещен близко к центру масс, чтобы измерить поступательное ускорение в этой точке. Как и в предыдущих исследованиях, общая сила оценивалась с помощью простой модели, основанной на законе Ньютона [31,57].В дополнение к этому авторы использовали информацию от гироскопа и магнитометра для оценки ориентации сегмента тела, что позволило выразить опорные векторы датчика в инерциальной опорной системе. Трехмерная сила, оцененная таким образом, сравнивалась с измерениями силовой пластины. Испытуемые выполняли задания на ускорение и смену направления [56]. Для восстановления положения IMU относительно наземной системы отсчета потребовались две попытки статической калибровки.Информация от магнитометра и акселерометра IMU использовалась для оценки начального курса. Затем измеренные величины были привязаны к наземной системе отсчета с помощью кватернионной математики [58]. Было получено хорошее согласие между вертикальной составляющей силы, оцененной IMU, и той, которая была измерена FP (Рисунок 9 и Рисунок 10). Однако плохое согласие наблюдалось в случае медиолатерального и переднезаднего компонентов (Рисунок 9 и Рисунок 10). Таким образом, данный метод можно рекомендовать только для оценки вертикальной составляющей GRF и ее величины.Что касается трехмерных векторов силы, максимальная угловая ошибка, наблюдаемая между векторами, оцененными IMU и FP, составила 10 ° [56]. Этот подход очень интересен, поскольку использование одного датчика IMU значительно упрощает клинические измерения посредством носимых датчиков. Однако, согласно [56], он был надежным только для оценки GRF в сагиттальной плоскости. Есть два других основных ограничения: во-первых, реальный центр масс меняет свое положение относительно ИДУ на крестце во время таких действий, как ходьба или бег.Таким образом, смещения и вращения таза могут вызывать артефакты при оценке сил [56]. Во-вторых, на использование магнитометров для оценки ориентации IMU влияют ферромагнитные помехи, которые могут привести к снижению точности результатов. Raper et al. [59] разработали протокол для измерения GRF с помощью одного IMU, установленного на средней части медиальной большеберцовой кости, и провели анализ надежности этого протокола, сравнив результат с силовой платформой. IMU состоял из трехосного акселерометра с частотой дискретизации 100 Гц.Анализ проводился с помощью программного обеспечения, предоставленного производителем, которое обеспечивает расчет пикового GRF по вертикальной составляющей ускорения большеберцовой кости. Испытуемые были профессиональными спортсменами, которых попросили бегать в помещении на треке, оборудованном пьезоэлектрическими FP. Каждый контакт стопы был идентифицирован, и вычисленный GRF был сопоставлен с тем, который был непосредственно измерен FP. Абсолютное значение GRF, измеренное IMU, отличалось от зарегистрированного FP. Было замечено, что IMU может недооценивать силу до 400 Н [59].Эта ошибка предполагалась из-за задержки между пиком ускорения и пиком приложенной силы. Авторы рекомендовали, чтобы измерение IMU не заменялось единицей измерения Ньютона, но оно все же способно измерять нагрузку на нижние конечности при беге. Точность была оценена как 83,96%, а надежность была очень высокой с ICC 0,97, таким образом, IMU можно было считать полезным инструментом для измерения нагрузки на нижние конечности у спортсменов, выполняющих спортивные задачи [59].Более продвинутая анатомическая модель использовалась Aurbach et al. [60], который реализовал модель опорно-двигательного аппарата (рис. 11) с использованием программного обеспечения AnyBody ™ (AnyBody Technology A / S, Ольборг, Дания). Модель может полагаться на подробное анатомическое представление скелета и на обратный кинетический двигатель для восстановления сил на основе измеренной кинематики. Модель могла рассчитывать GRF, а также силы, действующие на лодыжку, колено и бедро. Кинематические данные были собраны с помощью 15 IMU, установленных на: верхней стороне стоп, передней стороне голеней, передней стороне бедер, одном в крестце, одном между лопатками на спине и одном в области лопаток. лоб.Данные калибровки, полученные во время начальной фазы опоры, были необходимы для настройки магнитометров и акселерометров на местную систему отсчета. Модель стоящего гуманоида была зафиксирована поступательно в тазобедренном сегменте, поскольку система IMU может предоставлять только информацию о вращении. Модель была решена дважды с использованием кинематики, одновременно записанной: (i) ОС; (ii) ИДУ. Затем результаты сравнивали. Сравнение показано на рисунке 12. Данные ОС отображают более длительный период односторонней нагрузки на стопы и разницу в прогрессии кривой [60].Это исследование показало, что модель на основе IMU дает возможность оценить GRF независимо от лабораторных исследований походки, однако производительность IMU была плохой по сравнению с ОС [60]. Основные источники ошибок были связаны с флуктуациями магнитного поля, которые не могли быть полностью устранены с помощью процедуры калибровки. Фактически, используемые IMU широко использовали внутренние магнитометры для полной оценки их ориентации в пространстве, и на магнитометры легко влияют электромагнитные помехи или ферромагнитные объекты поблизости [61].Другое ограничение этого подхода заключается в конфигурации гуманоидной модели, которая должна точно соответствовать физическим характеристикам субъекта. Таким образом, требуется точная калибровка объекта и дальнейшая работа, чтобы свести к минимуму проблемы с моделью IMU. Thiel et al. [62] протестировали GRF во время спринтерского бега с помощью IMU. Они использовали два IMU, состоящие из трехмерного акселерометра, гироскопа и магнитометра. Частота дискретизации составляла 250 Гц, и данные регистрировались локально. IMU размещали на голени над медиальной лодыжкой.Данные акселерометра были согласованы и сопоставлены с силовой платформой, использованной для сравнения, в то время как спортсменов попросили бегать по беговой дорожке с инструментами. Предполагалось, что вертикальная составляющая GRF связана с ускорением хвостовика следующим линейным уравнением: где a x, y, z — составляющие измеренного ускорения, а c 1,2,3 — эмпирические коэффициенты. Коэффициенты были определены для каждой стопы с использованием силы, зарегистрированной на первых шагах [62] .Этот вид моделирования оказался подходящим для первых этапов спринта, где ожидается постоянный GRF и, следовательно, подходит линейное моделирование [62]. Кроме того, угловая скорость стойки использовалась для определения фаз стойки и поворота и, как следствие, для определения времени пика GRF. Авторы обнаружили, что этот метод не был надежным для каждого участника, даже несмотря на то, что он мог точно предсказать пиковый GRF для одного предмета (рис. 13). Потенциальные источники ошибок были выявлены в ослаблении силы на голеностопном суставе из-за скелетно-мышечной структуры и поглощения беговой обуви.Этот эффект можно уменьшить с помощью процедуры калибровки. Задача бега была дополнительно исследована Kiernan et al. [63]. Целью их исследования было изучение микротравм и механизмов травм из-за повторяющихся нагрузок, возникающих у бегунов. Величину пикового вертикального GRF оценивали с помощью трехмерного акселерометра, носимого на правом бедре. Диапазон записи ± 8 г, частота дискретизации 48 Гц. Ускорение бедра регистрировалось на протяжении всей тренировки. Использование переднезадних компонентов ускорения позволило идентифицировать удары правой и левой стопой с помощью специального алгоритма [64].Учитывались только правильные шаги, а максимальный GRF во время стойки оценивался с помощью модели линейной регрессии, как в [30]. Затем было вычислено среднее значение пикового GRF среди рассмотренных шагов. Также подсчитывали количество шагов. Участники были разделены на две группы: травмированные и здоровые. Сравнение этих групп показало, что у травмированных субъектов были более высокие пиковые значения вертикального GRF, а также совокупные нагрузки. Таким образом, такой метод позволяет прогнозировать травмы и фиксировать профили нагрузки участников [63].Однако необходимы дальнейшие исследования, чтобы лучше оценить влияние повторяющихся нагрузок, когда максимальная нагрузка приходится на тренировку, и, что наиболее важно, влияние асимметрии нагрузки на левую и правую ногу. Метод, предложенный [63], не смог оценить такие количества, поэтому необходимы дальнейшие исследования и более совершенные протоколы. Использование переносных IMU кажется многообещающим методом измерения таких количеств во время бега.3.1.2. Прыжки и другие задания
Прыжки, приседания и сгибания отличаются от ходьбы и бега.Во-первых, GRF всегда распределяются между двумя ногами и редко возникает одиночная опора, во-вторых, движение происходит в основном вдоль вертикальной оси и не является циклическим. Косвенная оценка GRF на каждой стопе затруднительна, как и обнаружение асимметрии в нагрузке на стопу.
Ранней работой по оценке GRF в вертикальных прыжках была работа Элвина и др. [65], которые предположили корреляцию между пиковым вертикальным GRF и пиковым вертикальным ускорением большеберцовой кости. Испытуемых просили прыгать на разной высоте, при этом регистрировалось ускорение голени.Ускорение измеряли с помощью двух одноосных акселерометров, надетых на опорную втулку, расположенную рядом с вестибулярными головками на обеих ногах, в то время как GRF измеряли с помощью FP. Ориентиры для размещения акселерометров были выбраны потому, что, по словам авторов: (i) ориентир легко определить путем пальпации; (ii) риск того, что датчик может нанести травму субъекту, был низким; и (iii) он ранее использовался в качестве места крепления акселерометра [65]. Диапазон измерения ± 70 г, частота дискретизации 1 кГц.Авторы обнаружили, что пиковое значение GRF при приземлении может достигать 8,2-кратного веса тела, в то время как пиковое ускорение большеберцовой кости может достигать 42,3 г. Наблюдалась сильная корреляция между пиковым GRF и пиковым ускорением (среднее R 2 = 0,812, p ≤ 0,01), поэтому авторы пришли к выводу, что пиковое GRF может быть вычислено по второму закону Ньютона, зная массу объекта. Это исследование помогло выявить несколько неточностей в процедуре, таких как: (i) относительное перемещение акселерометра по отношению к телу; (ii) шум и неизвлекаемые инструментальные погрешности; (iii) неизмеренный угол между большеберцовой костью и землей во время удара; (iv) возможная нелинейность во взаимосвязи между ускорением и GRF [65].Более того, не было выявлено четкой корреляции между высотой прыжка и пиковой силой удара, хотя это было продемонстрировано другими исследованиями [7]. Интересно, что авторы смогли вычислить время полета для прыжка и, следовательно, высоту по вертикали из временного профиля вертикального ускорения, используя ранее проверенный алгоритм [66]. Задача вертикального прыжка была дополнительно исследована Howard et al. [67] с помощью трехосного акселерометра, расположенного близко к центру масс.GRF одновременно измеряли с помощью FP, в то время как испытуемые выполняли некоторые контрдвижения и прыжки с падением. Минимальная эксцентрическая сила и пиковая концентрическая сила рассчитывались одновременно для прыжков с противодвижением, а пиковая сила приземления рассчитывалась одновременно для прыжков с падением. Авторы обнаружили хорошее соответствие между акселерометром и FP во время эксцентрической фазы прыжка с противодвижением, но наблюдалась последовательная систематическая ошибка между результатами силовой платформы и акселерометра.Следовательно, сила, полученная при измерении ускорения, не может использоваться взаимозаменяемо с силой, измеряемой FP. Таким образом, было рекомендовано использовать гироскопы для повышения точности наборов данных [67]. Pouliot-Laforte et al. [68] оценили валидность GRF в задачах вертикального прыжка при оценке только с помощью акселерометра. Анализ проводился как на здоровых детях, так и на детях с диагнозом несовершенный остеогенез I типа, патологии, которая обычно вызывает несколько функциональных ограничений и мышечную слабость [69,70].В таких случаях наличие простой и портативной измерительной системы было бы очень ценно для оценки GRF и, следовательно, механической нагрузки на кости. Оценка GRF была получена путем применения закона движения Ньютона, то есть умножения массы объекта на измеренное вертикальное ускорение, как в предыдущих исследованиях. Известно, что действия высокой интенсивности, такие как прыжки, генерируют высокие пиковые силы с высокой скоростью. Испытуемых просили выполнить пять различных прыжков и несколько маневров подъема на переносной силовой платформе с акселерометром на правом бедре.Акселерометр записывал данные с частотой дискретизации 60 Гц и имел диапазон ± 6 g. Расчетный GRF сравнивался с зарегистрированным FP. Акселерометр размещали на правой талии пациента, немного позади переднего гребня подвздошной кости, и удерживали на месте с помощью эластичной ленты. Как и в предыдущих исследованиях, результаты показали высокую корреляцию и хорошее соответствие между GRF, измеренным акселерометром и FP. Таким образом, измерение GRF с помощью акселерометра является потенциально ценным инструментом для оценки силы реакции земли у детей и подростков, как здоровых, так и с патологией [68].Небольшое завышение / недооценка усредненных значений GRF производными силами акселерометра позволяет предположить, что измерения силы при длительных записях являются достаточно точными. Авторы пришли к выводу, что, хотя размещение акселерометра на правом бедре было широко подтверждено в литературе, было бы предпочтительнее размещать датчик рядом с центром масс, то есть в нижней части спины. GRF во время движения на корточках измерялась с помощью Min и другие. [71], который сравнил производительность IMU с измерениями FP и OS.Приседания моделировались в сагиттальной плоскости как 3-сегментное соединение, а движение регистрировалось с помощью трех IMU, размещенных на пояснице, бедре и голени. Локальные оси x IMU были выровнены по нормали к сагиттальной плоскости. Датчики IMU регистрировали трехмерные ускорения, угловые скорости и магнитные поля. Частота дискретизации 100 Гц. IMU захватили кинематику каждого сегмента модели и реконструировали GRF с помощью обратной кинетики. Рассчитанный GRF показал высокую точность по сравнению с FP (RMSE Поза, аналогичная приседанию, принимается при выполнении прыжков с трамплина.Подробный анализ GRF и совместных сил при выполнении этого вида спорта был проведен Логаром и Муних [72]. Они разработали процедуру для оценки GRF и совместных сил, используя кинематическую информацию от носимых на теле IMU. Испытания проводились в лабораторных условиях с силовой платформой, установленной в непосредственной близости от зоны прыжка, что позволило напрямую измерить GRF во время фазы отталкивания (толчка). Десять IMU были размещены на теле испытуемого, как показано на рисунке 14. IMU состояли из трехосного акселерометра и трехосного гироскопа с диапазоном измерения ± 8 g, частотой дискретизации 400 Гц.Данные регистрировались на борту каждого IMU и синхронизировались с помощью беспроводного сигнала. Человеческое тело было смоделировано как модель связующего сегмента, состоящая из четырех сегментов, как показано на рисунке 15. Каждый сегмент был принят как твердое тело с постоянными механическими свойствами. Необходима процедура калибровки, чтобы измерения не зависели от точки и положения фиксации IMU. Процедура включала: (i) измерение начальной ориентации каждого сегмента; (ii) измерение и интегрирование угловой скорости сегмента во время движения; (iii) суммирование начальной ориентации и интегральной угловой скорости.Первоначальная ориентация оценивалась на этапе бега, когда предполагалось, что все сегменты тела имеют сравнимое ускорение, субъект сохранял позу, похожую на присед, а ориентация ступней / лыж принималась в качестве исходной ориентации для всех других сегментов тела. модель. Антропометрические параметры (масса, размер, момент инерции) были получены из статистических таблиц. Обратную динамику предложенной модели можно решить двумя способами: снизу вверх и сверху вниз.В обоих случаях предполагается, что единственными внешними силами, действующими на тело, являются GRF. В восходящем направлении необходимы GRF, измеренные силовой пластиной. Используя преимущества внешнего GRF, силы и моменты на каждом сегменте тела могут быть вычислены в соответствии с уравнениями равновесия Ньютона-Эйлера. В нисходящем порядке GRF неизвестны. Внутренние силы, действующие на верхнюю часть тела, оцениваются из ускорения и уравнения Ньютона. Затем внутренние силы, действующие на другие сегменты тела, постепенно вычисляются в соответствии с уравнениями равновесия Ньютона-Эйлера.У основания GRF — это величина, необходимая для уравновешивания последнего уравнения. При нисходящем подходе, как только GRF известен, уравнение можно повторно применить в восходящем направлении для вычисления внутренних моментов, действующих на суставы. Проверка этого метода показала среднюю среднеквадратичную ошибку между оценками GRF. и измеренные с помощью силовой пластины 62,5 — 259 Н, соответствующие отклонению 9,7 — 14% [72]. Сравнение рассчитанных и измеренных профилей GRF показано на рисунке 16.Часть наблюдаемых различий была связана с размером лыж по отношению к силовой платформе. Показание FP не дает полного GRF, но показание зависит от части лыж, которая эффективно контактирует с FP [72].Вывод исследования состоял в том, что наблюдалось хорошее сходство между измеренным и рассчитанным GRF. Таким образом, предложенный протокол IMU можно считать многообещающим и простым в использовании инструментом для оценки GRF в прыжках с трамплина.
Клиническая необходимость в измерении внутренних сил и моментов, действующих на позвоночник и суставы, а также GRF во время сгибания туловища, привела к протоколу, предложенному Faber et al.[73]. Этот протокол предназначался для использования в амбулаторных условиях, полагаясь только на носимые датчики и устраняя необходимость в лаборатории анализа движения. Авторы использовали IMU X-Sens ® в сочетании со встроенной моделью сегмента полного тела X-Sens ® [74,75]. Модель использовала 17 IMU, состоящих из трехосных акселерометров, гироскопов и магнитометров, дистанционно управляемых и запускаемых. Частота дискретизации 120 Гц. Полная конфигурация тела позволила оценить трехмерный GRF, действующий на сегменты стопы.Протоколу требовалась калибровка, полученная путем записи вертикальной позы, а затем измерялось ускорение каждого сегмента тела во время упражнения на сгибание. Моменты и GRF оценивались методом сверху вниз с использованием второго закона Ньютона. Результаты сравнивались с GRF, одновременно измеренным FP, и с внутренними силами / моментами, вычисленными с использованием информации от FP и OS. Как отмечалось в предыдущих исследованиях [72], хорошее соответствие между FP и IMU наблюдалось для профиля вертикальной составляющей GRF со среднеквадратичной ошибкой ниже 20 Н, соответствующей 2% максимальной вертикальной силы [73].Также наблюдается хорошее согласие между пиковыми значениями GRF. Вместо этого силы в переднезаднем и медиолатеральном направлениях были переоценены методом IMU. Что касается внутренних моментов на L5 / C1, максимальная среднеквадратичная ошибка была ниже 10 Нм, что соответствует 5% пикового момента растяжения [73]. Основные наблюдаемые неточности были связаны с предположением о твердом теле и массой каждого сегмента тела, которая была назначена в соответствии со статистической моделью, основанной на процентах от общей массы тела [73].Таким образом, массы, используемые для вычислений, могут не совсем точно отражать массы реальных сегментов тела каждого субъекта. В согласии с предыдущими исследованиями, авторы пришли к выводу, что инерционный захват движения является хорошим кандидатом для оценки GRF и внутреннего момента в амбулаторных условиях, но его применимость ограничена анализируемой задачей, то есть сгибанием туловища. Для анализа других задач требуются дальнейшие исследования. Задачи «сидеть, чтобы стоять» и «приседать» были исследованы Кодама и Ватанабэ [76].Их целью была оценка внутреннего совместного момента, GRF и CoP на основе кинематических записей IMU. Они протестировали три модели тела: модель с пятью звеньями, модель с четырьмя звеньями и модель с тремя звеньями. Разница заключалась в количестве сегментов, представляющих туловище [76]. Модель пяти звеньев изображена на рисунке 17. Другие модели были получены путем объединения сегментов, составляющих ствол. Инерционные параметры каждого сегмента были назначены в соответствии с прямыми измерениями на испытуемых, методами статистического распределения, описанными в литературе [77,78] и в базе данных человеческого тела [79].Суставные моменты оценивались путем решения уравнений движения каждого сегмента, диаграмма свободного тела которого изображена на рисунке 17, а GRF оценивался как сумма произведений ускорения каждого сегмента и массы этого сегмента, как в предыдущих методах. . КП был рассчитан с использованием уравнения вращательного движения сегмента стопы и сил и моментов, действующих на этот сегмент [76]. На туловище, бедрах и голенях были установлены семь инерционных датчиков, как показано на рисунке 18.IMU представляли собой изготовленные на заказ беспроводные датчики с частотой дискретизации 100 Гц. Движение одновременно регистрировалось ОС и двумя ФП. Затем испытуемые выполняли исследуемые задания приседания и вставания из положения сидя. Результаты не показали значительных различий между 5-канальной и 4-канальной моделями, в то время как худшие результаты наблюдались для 3-канальной модели. Причина плохих результатов связана с приближением расчета плеча рычага для сегмента туловища. Поэтому авторы рекомендовали модель с четырьмя звеньями.Что касается оценки GRF с помощью нисходящего метода, никаких различий между инерционным захватом движения и ОС не наблюдалось. Средние среднеквадратичные ошибки в горизонтальном, вертикальном GRF и CoP составили соответственно 10 Н, 15 Н и 2 см. Таким образом, метод может быть полезен для практических приложений, когда FP недоступны. Поскольку модель, предложенная в [76], была основана на нескольких сегментах тела, требовалось широкое использование стандартных таблиц для вычисления механических параметров каждого сегмента. Такие статистические значения могут вносить неточности в оценку представляющих интерес количеств, поскольку они могут не отражать определенную совокупность.Это общая проблема для всех тех методов, которые требуют знания инерционных свойств сегментов тела. Сетуайн и его коллеги [80] также оценивали вертикальные прыжки с помощью одного IMU, размещенного на поясничном отделе позвоночника. Целью их работы было определение надежности такого метода и его применимости по сравнению с измерениями силовой пластины. GRF был вычислен по ускорению с помощью закона Ньютона, как и в предыдущих исследованиях, и измерение профиля вертикальной скорости позволило идентифицировать фазы скачка.Как и в предыдущих исследованиях, наблюдалась хорошая корреляция между оцененным вертикальным GRF и GRF, непосредственно измеренным с помощью силовой платформы, а также наблюдалось смещение между измеренными значениями. Чем больше величина силы, тем больше разногласий между IMU и FP.Определение пар действий и сил реакции — видео и стенограмма урока
Определение действия и реакции
Определить силы действия и реакции между объектами довольно просто.Во-первых, это помогает идентифицировать само взаимодействие. Допустим, вы отжимаетесь от пола. Или, может быть, теннисная ракетка ударяет по теннисному мячу. Как насчет запуска ракеты с земли?
Все эти примеры представляют собой взаимодействия, в результате которых на объекты, участвующие во взаимодействии, действуют силы. Когда вы отталкиваетесь от пола, вы прикладываете силу действия к земле, в то время как земля оказывает противодействующую силу прямо на вас.
В теннисном матче ракетка оказывает на мяч действующую силу, и когда мяч ударяется по нему, она оказывает на ракетку равную и противоположную силу реакции.
Ракета запускается, потому что она толкает газ, выходящий из заднего конца, для силы действия, в то время как газ толкает ракету вверх с силой противодействия.
Только разные объекты
В каждом из этих случаев действие — это сила, оказываемая первым объектом на второй, а сила противодействия — это сила, оказываемая на первый объект вторым. Важно отметить, что силы действия и противодействия действуют на разные объекты при взаимодействии.Две равные и противоположные силы, действующие на один и тот же объект, не образуют пары действие-противодействие!
Вот почему две противостоящие силы не сводятся друг к другу. Если по футбольному мячу бьют с обеих сторон одновременно, он никуда не уходит, потому что две ноги, бьющие его ногой, оказывают равные и противоположные силы на один и тот же мяч и компенсируют друг друга.
Однако, когда вы ударяете по футбольному мячу только одной ногой, эта ступня оказывает на мяч силу воздействия, и в то же время мяч оказывает на вашу ногу силу реакции.В этом случае силы не уравновешиваются, поэтому мяч летит по воздуху.
Эффект сил
Вам может быть интересно, почему мяч взлетает, а вы остаетесь стоять на земле. Это связано с массой объектов во взаимодействии. Вы намного массивнее мяча, поэтому мяч ускоряется. Оба объекта оказывают одинаковое количество силы, но разница заключается в том, как эти силы воздействуют на разные объекты.
Давайте рассмотрим это подробнее.Представьте себе пушку, стреляющую пушечным ядром. Между двумя объектами существует взаимодействие, поэтому существуют силы действия и противодействия. Тем не менее, пушка лишь слегка отскакивает, когда стреляет пушечным ядром, но пушечное ядро летит по воздуху.
Мы можем посмотреть на второй закон движения Ньютона , чтобы понять, почему это происходит. Этот закон гласит, что ускорение пропорционально чистой силе и обратно пропорционально массе объекта. Это означает, что с увеличением силы увеличивается и ускорение , которое является изменением состояния движения объекта.Но с увеличением массы ускорение уменьшается. Поскольку силы равны, вы можете видеть, что масса действительно является ключевым игроком в том, как на объект влияют силы, действующие на него.
Собирая все вместе, понятно, что пушка не ускоряется так сильно, как ядро, потому что пушка намного массивнее. Больше массы означает меньшее ускорение. Пушечное ядро имеет гораздо меньшую массу, поэтому на него очень сильно влияет сила взаимодействия, оно вылетает из пушки и летит по воздуху.
Это верно для любой пары сил действие-противодействие. Допустим, вы едете по шоссе, и жук врезается вам в лобовое стекло. Ваша машина, наездившаяся на жучок, — это действие, а жук, попавший в ваше лобовое стекло, — это реакция. В то время как жук, к сожалению, встречает безвременную смерть, ваше лобовое стекло почти не замечает это событие. Сила, действующая на жучок, аналогична силе, приложенной к лобовому стеклу, но влияние на жука намного больше, потому что он имеет такую небольшую массу по сравнению с вашим автомобилем!
Действие равно противодействию
Есть еще одна вещь, о которой следует помнить о силах действия-противодействия: действие всегда равно противодействию.Это означает, что независимо от того, какую силу вы пытаетесь приложить к объекту, действие может происходить только с той силой, с которой может вернуться реакция.
Когда вы врезались в жучок, ваше лобовое стекло не могло оказать на жук больше силы, чем жучок мог бы оказать на ваш автомобиль. То же самое и с футболом — вы не можете ударить его сильнее, чем он может дать вам ответный удар.
Все еще не верите? Попробуйте сделать это дома: подержите лист бумаги в воздухе, уроните его и, когда он упадет, постарайтесь ударить по нему как можно сильнее.Что вы обнаружите, так это то, что как бы сильно вы ни взмахнули ею, вы не сможете ударить по бумаге сильнее, чем она может нанести вам ответный удар. Бумага просто не способна проявить очень большое количество силы, а поскольку действие и противодействие всегда равны по величине, это не позволяет вам приложить к ней большое количество силы воздействия.
Резюме урока
Третий закон движения Ньютона говорит нам, что для каждой силы действия существует противоположная и равная сила противодействия. При любом взаимодействии между двумя объектами первый объект оказывает силу на второй, а второй объект оказывает на первый объект силу, равную по величине и противоположную по направлению.
Для простоты проще всего назвать силу первого объекта действием, а силу второго — противодействием, но на самом деле это не имеет значения, если вы понимаете взаимодействие и то, как объекты связаны друг с другом. .
Силы действия и реакции не нейтрализуют друг друга, потому что они действуют на отдельные объекты. Что отличает взаимодействие, так это влияние сил, а не самих сил. Менее массивные объекты будут чувствовать эффекты сильнее, чем более массивные.Это потому, что масса обратно пропорциональна ускорению — изменению состояния движения объекта.
Больше массы означает меньшее ускорение, меньшая масса означает большее ускорение объекта. Несчастный жук брызжет на ваше лобовое стекло, потому что ускорение для жука намного больше, чем то, что испытывает ваш автомобиль!
Силы действия и реакции всегда равны по величине, поэтому невозможно приложить к объекту больше силы, чем оно может оказать.Как бы вы ни старались, вы не сможете ударить по листу бумаги сильнее, чем он может ударить вас обратно. Точно так же ваше лобовое стекло не трескается, когда жук ударяет его, потому что сила воздействия может быть ровно той, которую это крошечное насекомое может оказать в ответ.