Методика решения задач по теоретической механике
Методика решения задач по теоретической механике
ОглавлениеПРЕДИСЛОВИЕЧасть первая. СТАТИКА Предмет статики. Связи и реакции связей 1. Абсолютно гладкая опорная поверхность 2.  3. Опора на ребро 4. Гибкое тело (нить, канат, цепь) 5. Цилиндрический шарнир 6. Сферический шарнир 7. Стержневая опора 8. Шероховатая опорная поверхность 9. Неподвижная жесткая заделка I. ПЛОСКАЯ СИСТЕМА СИЛ 1-1. Равновесие трех сил 1-3. Равновесие какого угодно числа сил ГЛАВА II. ПАРАЛЛЕЛЬНЫЕ СИЛЫ ГЛАВА III. ПРИВЕДЕНИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ К ПРОСТЕЙШЕМУ ВИДУ ГЛАВА IV. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ 4-2. Решение задач на равновесие тела при наличии идеальных связей (трение отсутствует) 4-3. Решение задач на опрокидывание 4-4. Решение задач на равновесие тел при наличии трения 4-5. Решение задач на равновесие системы сочлененных тел ГЛАВА V. ГРАФИЧЕСКАЯ СТАТИКА 5-3. Определение усилий в стержнях фермы 5-4. Метод сквозных сечений 5-5. Метод вырезывания узлов II. ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ ГЛАВА VI. СИЛЫ, ЛИНИИ ДЕЙСТВИЯ КОТОРЫХ ПЕРЕСЕКАЮТСЯ В ОДНОЙ ТОЧКЕ Глава VII. ПРИВЕДЕНИЕ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ К ПРОСТЕЙШЕМУ ВИДУ ГЛАВА VIII.  РАВНОВЕСИЕ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ РАВНОВЕСИЕ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛГЛАВА IX. ЦЕНТР ТЯЖЕСТИ Часть вторая. КИНЕМАТИКА 10-1. Предмет кинематики. Основные положения 10-2. Решение задач при нахождении скорости и ускорения по заданному закону движения точки 10-3. Решение задач с помощью составления закона движения точки ГЛАВА XI. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ 11-2. Решение задач при нахождении скорости и ускорения по заданному закону движения точки в координатной форме 11-3. Решение задач на составление закона движения точки в координатной форме и нахождение скорости и ускорения движения по данным задачи 11-4. Решение задач при нахождении скорости и ускорения движущейся точки в случае естественного способа задания движения 11-5. Решение задач на составление закона движения точки в естественной форме и нахождение скорости и ускорения по данным задачи IV. ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА ГЛАВА XII.  ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА. ПРЕОБРАЗОВАНИЕ ПРОСТЕЙШИХ ДВИЖЕНИЙ ТВЕРДОГО ТЕЛА ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА. ПРЕОБРАЗОВАНИЕ ПРОСТЕЙШИХ ДВИЖЕНИЙ ТВЕРДОГО ТЕЛА12-2. Решение задач на нахождение кинематических элементов по заданному закону вращения тела 12-3. Решение задач на составление закона вращения тела и нахождение кинематических элементов по данным задачи 12-4. Решение задач в случае преобразования простейших движений твердого тела V. СЛОЖЕНИЕ И РАЗЛОЖЕНИЕ ДВИЖЕНИЙ ТОЧКИ 13-1. Основные положения теории сложного движения точки 13-2. Решение задач с помощью формулы сложения скоростей точки ГЛАВА XIV. СЛОЖЕНИЕ УСКОРЕНИЙ ТОЧКИ 14-1. Решение задач с помощью формулы сложения ускорений при переносном поступательном движении 14-2. Решение задач с помощью формулы сложения ускорений точки при переносном вращательном движении вокруг неподвижной оси VI. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 15-1. Основные положения теории плоскопараллельного движения твердого тела 15-2. Решение задач при нахождении скоростей точек плоской фигуры с помощью формулы распределения скоростей 15-3.  Решение задач при определении скоростей точек плоской фигуры с помощью нахождения мгновенного центра скоростей Решение задач при определении скоростей точек плоской фигуры с помощью нахождения мгновенного центра скоростейГЛАВА XVI. УСКОРЕНИЕ ТОЧЕК ТЕЛА В ПЛОСКОМ ДВИЖЕНИИ 16-1. Решение задач при нахождении ускорений точек плоской фигуры с помощью формулы распределения ускорений 16-2. Решение задач на нахождение мгновенного центра ускорений плоской фигуры ГЛАВА XVII. СЛОЖЕНИЕ ПЛОСКИХ ДВИЖЕНИЙ ТЕЛА (СЛОЖЕНИЕ ВРАЩЕНИЙ ТВЕРДОГО ТЕЛА ВОКРУГ ПАРАЛЛЕЛЬНЫХ ОСЕЙ) Часть третья. ДИНАМИКА 18-1. Основные положения. Дифференциальные уравнения движения материальной точки 18-3. Вторая основная задача динамики материальной точки (обратная первой) ГЛАВА XIX. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ 19-1. Теорема об изменении количества движения точки 19-2. Теорема об изменении момента количества движения точки 19-3. Теорема об изменении кинетической энергии точки ГЛАВА XX. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ ТОЧКИ XIII. ДИНАМИКА СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК 21-1.  Теорема о движении центра инерции системы Теорема о движении центра инерции системы21-2. Теорема об изменении количества движения системы 21-3. Теорема об изменении момента количества движения системы 21-4. Теорема об изменении кинетической энергии системы ГЛАВА XXII. ПРИНЦИПЫ МЕХАНИКИ 21-1. Принцип Даламбера 22-2. Принцип возможных перемещений 22-3. Принцип Даламбера-Лагранжа (Общее уравнение динамики системы) ГЛАВА XXIII. УДАР |
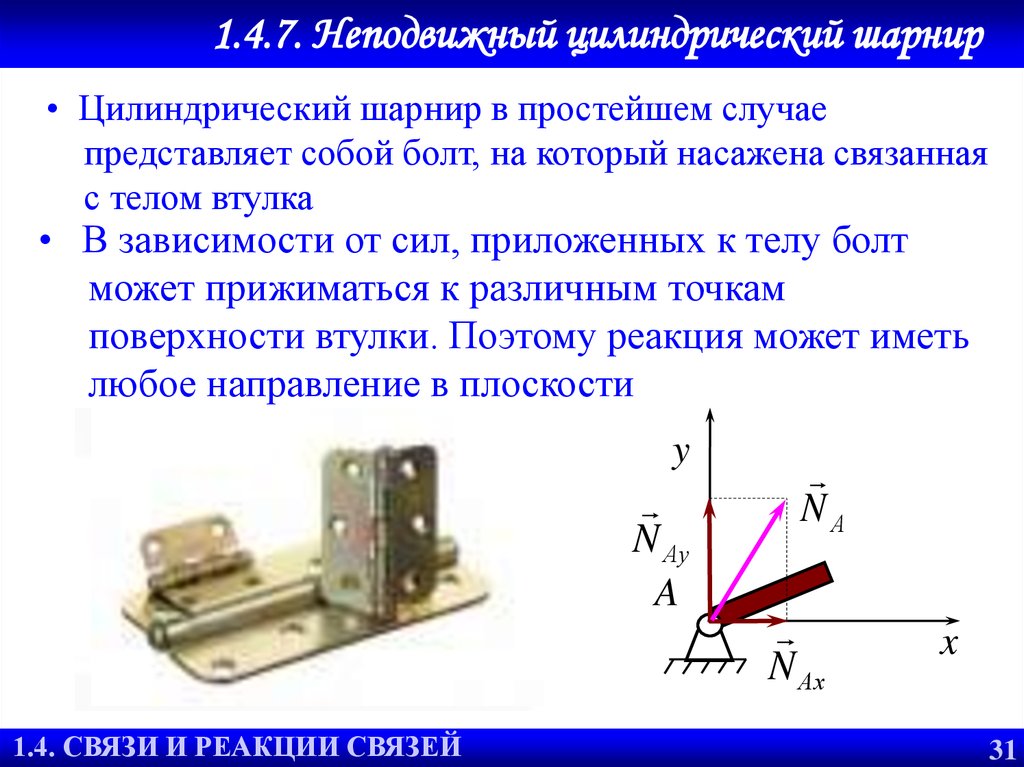
2) Цилиндрический шарнир (рис. 1.6)
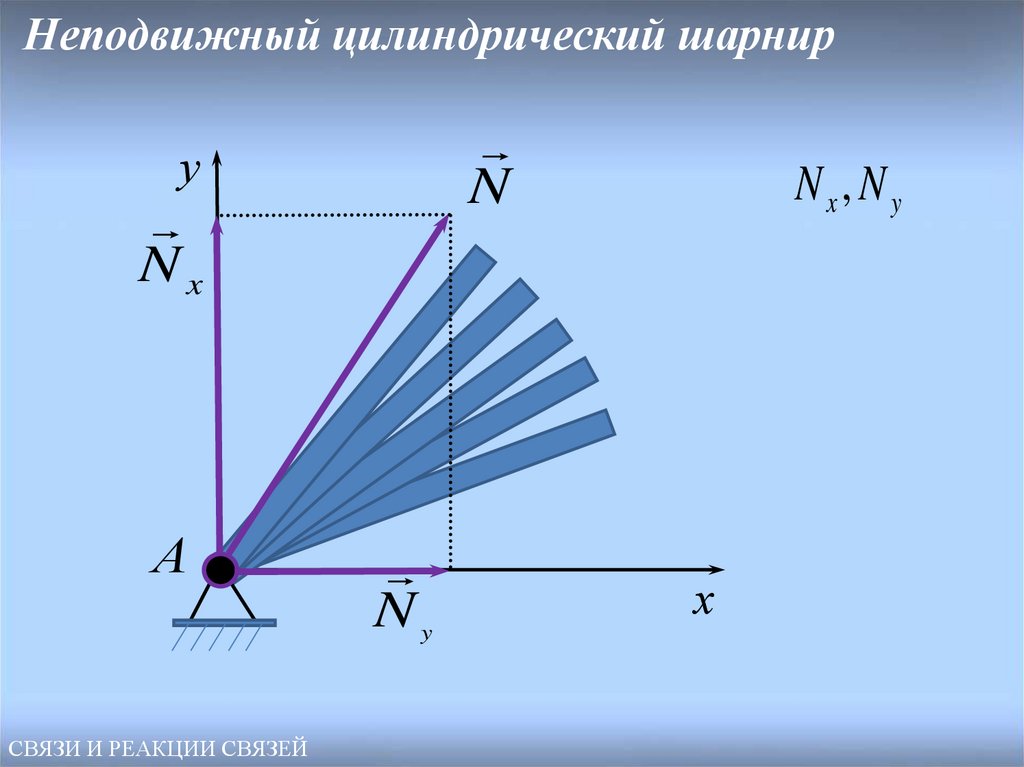
Вцилиндрическое отверстие телаТ вставляется цилиндрический болт (заштрихован) несколько меньшего диаметра, чем отверстие. Тело Т может вращаться вокруг оси болта. Реакция цилиндрического шарнира лежит в плоскости, перпендикулярной оси болта, проходит через центр болта и точку касания с телом. Таким образом, направление реакциинеизвестно и определяется в зависимости от приложенных к телу сил. Часто, чтобы не вводить неизвестный угол, определяющий направление реакции , ее заменяют двумя другими составляющими по взаимно ортогональным направлениям:
.
Цилиндрическая шарнирно-подвижная опора (подвижной каток) (рис. 1. 7)
Тело Т опирается на гладкую поверхность через шарнир, поставленный на катки. Реакция шарнирно-подвижной опоры направлена перпендикулярно опорной поверхности.
ТелоТ прикреплено с помощью шарнира к неподвижной поверхности. Направление реакции опоры может быть любым, в зависимости от приложенных сил. Как и в случае 2), чтобы не вводить неизвестный угол, реакцию раскладывают по двум взаимно ортогональным направлениям.
5) Гибкая нерастяжимая нить (рис. 1.9)
Реакция нити , называемая натяжением нити, направлена вдоль нити к точке подвеса.
6) Невесомый шарнирно-закрепленный на концах стержень (рис. 1.10)
Реакция
невесомого стержня направлена вдоль
стержня. При этом стержень может быть
как сжат, и тогда реакция стержня
направлена от стержня к телу,
так и растянут.
7) Жесткая заделка (рис. 1.11)
Конец балки АВ жестко заделан в стену. При нагрузке на балку в заделке возникают реакции, состоящие из реакции заделки и пары с реактивным моментом заделки. Так как направление реакции заделкинеизвестно, ее обычно раскладывают по двум взаимно ортогональным направлениям:
.
Моменты сил. Главный вектор и главный момент системы сил
Для решения основной задачи статики – определение условий равновесия твердых тел, находящихся под действием системы сил, необходимо ввести понятия моментов силы.
Момент силы относительно произвольной точки О, обозначаемый , определяется как вектор, равный векторному произведению
,
где — радиус-вектор точки приложения силы
 1.12).
1.12).Модуль момента силы относительно точки О вычисляется по формуле
,
где длина перпендикуляра h, опущенного из точки О на линию действия силы, называется плечом силы. Направление вектора определяется по правилу векторного произведения.
Момент силы относительно осиl, обозначаемый , — это скалярная величина, равная произведению модуля проекции силы(рис. 1.13) на плоскость П, перпендикулярную осиl, на плечо hп этой проекции относительно точки О пересечения оси и плоскости, взятая со знаком плюс при стремлении силы повернуть тело, к которому она приложена, против хода часовой стрелки и со знаком минус – в противоположном случае, если смотреть с конца оси.
Из
формулы (1.1) видно, что момент силы
относительно оси равен нулю, если либо
сила параллельна оси (Fп = 0), либо сила пересекает ось (hп = 0).
(1.1)
Существует связь между моментом силы относительно точки О и моментом силы относительно оси, проходящей через эту точку: момент силы относительно оси равен проекции момента силы относительно точки оси на эту ось.
Главным вектором системы сил называется вектор, равный геометрической сумме векторов всех сил системы. Главный вектор не является силой. Это свободный вектор, полученный формальным сложением перенесенных в любую точку векторов сил системы:
.
Главным моментом системы сил относительно некоторой точки О называется приложенный в этой точке вектор, равный геометрической сумме моментов всех сил системы относительно этой точки:
.
(1. 3)
3)
Соединение с одним призматическим и одним вращающимся примитивами, обладающими оси параллельного движения
Основное содержание
Соединение с одним призматическим и одним вращательным примитивами, обладающими оси параллельного движения
Библиотека
Соединения
Описание
Этот блок представляет собой соединение с одним поступательным и одним вращательная степень свободы. Один призматический примитив обеспечивает трансляционная степень свободы. Один вращающийся примитив обеспечивает вращательная степень свободы. Оси перемещения и вращения остаются выравниваются во время моделирования.
Степени свободы соединения
Блок соединения представляет движение между основанием и толкателем
кадры как последовательность изменяющихся во времени преобразований. Каждый совместный примитив
применяет одно преобразование в этой последовательности. Преобразование переводит
или поворачивает ведомую раму относительно примитива соединения
базовая рама. Для всех примитивов соединения, кроме первого, базовая рама
совпадает с кадром-последователем предыдущего совместного примитива
в последовательности.
Для всех примитивов соединения, кроме первого, базовая рама
совпадает с кадром-последователем предыдущего совместного примитива
в последовательности.
На каждом временном шаге во время моделирования применяется блок соединения последовательность изменяющихся во времени преобразований кадра в следующем порядке:
Вращение:
Перевод:
На рисунке показана последовательность совместных преобразований происходят на заданном временном шаге моделирования. Полученный кадр каждого преобразование служит базовым кадром для последующего преобразования.
Последовательность совместной трансформации
Набор опциональных направляющих в сборе для каждого сустава примитивный. Цели включают положение и скорость. Уровень приоритета устанавливает относительную важность государственных целей. Если две цели несовместимы, уровень приоритета определяет, какая из целей удовлетворить.
Параметры внутренней механики учитывают накопление энергии и
диссипация на каждом суставном примитиве.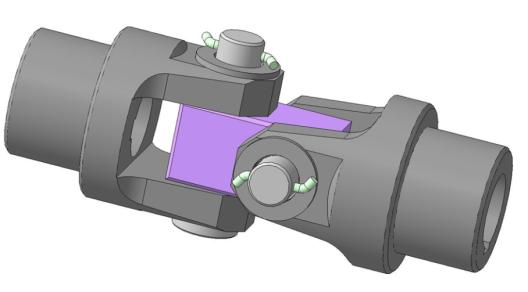 Пружины служат накопителем энергии.
элементы, противодействующие любой попытке сместить соединительный примитив из
его равновесное положение. Совместные демпферы действуют как рассеиватель энергии
элементы. Пружины и амортизаторы строго линейны.
Пружины служат накопителем энергии.
элементы, противодействующие любой попытке сместить соединительный примитив из
его равновесное положение. Совместные демпферы действуют как рассеиватель энергии
элементы. Пружины и амортизаторы строго линейны.
Во всех примитивах, кроме ходового винта и постоянной скорости, пределы соединений служат для сдерживания Диапазон движения между кадрами. Совместный примитив может иметь нижнюю границу, верхнюю границу, оба или, в состоянии по умолчанию, ни один. Чтобы обеспечить соблюдение границ, соединение добавляет к каждому пружина-демпфер. Чем жестче пружина, тем сильнее остановка или отскок, если колебания возникают. Чем сильнее демпфер, тем глубже вязкие потери, которые постепенно уменьшают контакт колебаний или, в примитивах с передемпфированием, полностью препятствуют их формированию.
Каждый примитив соединения имеет набор дополнительных активаций и датчиков
порты. Порты активации принимают физические входные сигналы, которые управляют
суставные примитивы.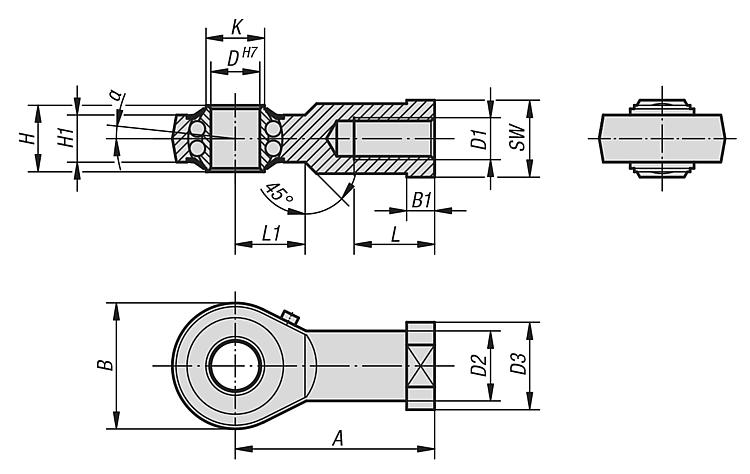 Этими входными данными могут быть силы и крутящие моменты или желаемое
совместная траектория. Сенсорные порты обеспечивают физические выходные сигналы, которые
измеряют примитивное движение сустава, а также силы и крутящие моменты срабатывания.
Режимы срабатывания и типы датчиков различаются в зависимости от примитива соединения.
Этими входными данными могут быть силы и крутящие моменты или желаемое
совместная траектория. Сенсорные порты обеспечивают физические выходные сигналы, которые
измеряют примитивное движение сустава, а также силы и крутящие моменты срабатывания.
Режимы срабатывания и типы датчиков различаются в зависимости от примитива соединения.
Параметры
Примитив вращения: цели состояния
Укажите цели состояния примитива вращения и их приоритет уровни. Целевое состояние — это желаемое значение для одного из совместных состояний. параметры — положение и скорость. Уровень приоритета – это относительная важность государственной цели. Он определяет, насколько точно цель должна быть достигнута. Используйте инструмент Model Report в Mechanics Explorer для проверки состояния сборки для каждой цели совместного состояния.
- Укажите целевое положение
Выберите этот параметр, чтобы указать желаемое исходное положение соединения в нулевое время.
 Это относительный угол поворота, измеренный примерно
совместная примитивная ось ведомой рамы относительно
базовая рама. Указанная цель разрешена в базовом кадре. Выбор
эта опция предоставляет поля приоритета и значения.
Это относительный угол поворота, измеренный примерно
совместная примитивная ось ведомой рамы относительно
базовая рама. Указанная цель разрешена в базовом кадре. Выбор
эта опция предоставляет поля приоритета и значения.- Указать целевую скорость
Выберите этот параметр, чтобы указать желаемую скорость примитива соединения в нулевое время. Это относительная угловая скорость, измеренная примерно совместная примитивная ось ведомой рамы относительно базовая рама. Он решен в базовой рамке. Выбор этой опции предоставляет поля приоритета и значения.
- Приоритет
Выберите приоритет цели состояния. Это уровень важности, присвоенный до государственной цели. Если все цели состояния не могут быть одновременно удовлетворены, уровень приоритета определяет, какие цели должны быть удовлетворены во-первых, и как близко их удовлетворить. Этот вариант подходит для обоих целевые значения состояния положения и скорости.

Уровень приоритета Описание High (desired)Satisfy state target precisely Low (approximate)Satisfy state target approximately
- Value
Enter the state target numerical value . По умолчанию
0. Выберите или введите физическую единицу измерения. По умолчаниюградусовдля положение иград/сдля скорости.
Примитив вращения: внутренняя механика
Укажите внутреннюю механику примитива вращения. Внутренний
механика включает в себя линейные крутящие моменты пружин, учет накопления энергии,
и линейные демпфирующие моменты с учетом рассеяния энергии. Ты
может игнорировать внутреннюю механику, сохраняя жесткость пружины и демпфирование
значения коэффициента по адресу 0 .
- Положение равновесия
Введите положение равновесия пружины. это вращение угол между базовой и толкающей рамами, при котором крутящий момент пружины равен нулю. Значение по умолчанию – 9.0100 0 . Выберите или введите физическая единица. По умолчанию
градусов.- Жесткость пружины
Введите линейную жесткость пружины. Это необходимый крутящий момент чтобы повернуть примитив сустава на единицу угла. По умолчанию
0. Выберите или введите физическую единицу измерения. По умолчаниюН*м/град.- Коэффициент демпфирования
Введите коэффициент линейного демпфирования. Это необходимый крутящий момент поддерживать постоянную совместную примитивную угловую скорость между основанием и следящие кадры. По умолчанию
0. Выберите или ввести физическую единицу. По умолчаниюН*м/(град/с).
Примитив вращения: Ограничения
Ограничение диапазона движения примитива шарнира. Совместные ограничения используют пружинные демпферы для сопротивляться перемещению за пределы диапазона. Совместный примитив может иметь нижнюю границу, верхняя граница, оба или, в состоянии по умолчанию, ни один. Чем жестче пружина, тем жестче останавливаться или подпрыгивать, если возникают колебания. Чем сильнее демпфер, тем больше вязкость потери, которые постепенно уменьшают контактные колебания или, в передемпфированных примитивах, удерживают их от формирования вообще.
- Указать нижний предел
Выберите, чтобы добавить нижнюю границу диапазона движения примитива соединения.
- Задать верхний предел
Выберите, чтобы добавить верхнюю границу диапазона движения примитива соединения.
- Значение
Место, мимо которого следует сопротивляться совместному перемещению.
 Местоположение является смещением от
основание к толкателю, измеренное в базовой раме, с которой начинается контакт. Это
расстояние по оси в призматических примитивах, угол вокруг оси в
вращающиеся примитивы и угол между двумя осями в сферических примитивах.
Местоположение является смещением от
основание к толкателю, измеренное в базовой раме, с которой начинается контакт. Это
расстояние по оси в призматических примитивах, угол вокруг оси в
вращающиеся примитивы и угол между двумя осями в сферических примитивах.- Жесткость пружины
Сопротивление контактной пружины смещению за пределы соединения. пружина линейна, а ее жесткость постоянна. Чем больше значение, тем сложнее остановка. Отношение усилия пружины к усилиям демпфера определяет, будет ли стопор недостаточно демпфирован и склонен к колебаниям при контакте.
- Коэффициент демпфирования
Сопротивление контактного демпфера перемещению за пределы соединения. Демпфер линейна, а ее коэффициент постоянен. Чем больше значение, тем больше вязкие потери, которые постепенно уменьшают контактные колебания, если таковые возникают.
 пропорция усилия пружины к силе демпфера определяет, является ли упор недостаточно демпфированным
и склонны к колебаниям при контакте.
пропорция усилия пружины к силе демпфера определяет, является ли упор недостаточно демпфированным
и склонны к колебаниям при контакте.- Переходная область
Область, в которой усилие пружины-демпфера увеличивается до полного значения. область — это расстояние вдоль оси в призматических примитивах, угол вокруг ось в вращающихся примитивах и угол между двумя осями в сферических примитивы.
Чем меньше область, тем острее начало контакта и меньше временной шаг, требуемый от решателя. В компромиссе между точностью моделирования и скорость моделирования, уменьшение области перехода повышает точность, в то время как расширение увеличивает скорость.
Примитив вращения: Приведение в действие
Укажите параметры срабатывания для примитива вращения.
Режимы срабатывания включают Крутящий момент и Движение . Выбор
Выбор Предоставлено входом из раскрывающегося списка
список для режима срабатывания добавляет соответствующий физический сигнал
порт на блок. Используйте этот порт, чтобы указать входной сигнал. Вход
сигналы разрешаются в основном кадре.
- Крутящий момент
Выберите настройку момента срабатывания. Значение по умолчанию – 9.0100 Нет .
Настройка крутящего момента Описание НетОбеспечивается входомМомент срабатывания от физического входного сигнала. Сигнал обеспечивает крутящий момент, действующий на ведомую раму по отношению к базовой раме относительно оси примитива сустава. Действует равный и противоположный крутящий момент на базовой раме. Рассчитывается автоматическиМомент срабатывания из автоматического расчета.  Симскейп™
Multibody™ вычисляет
и применяет крутящий момент на основе динамики модели.
Симскейп™
Multibody™ вычисляет
и применяет крутящий момент на основе динамики модели.- Движение
Выберите настройку движения срабатывания. По умолчанию установлено значение
. Автоматически Вычислено.Настройка движения срабатывания Описание Предоставляется входомСовместное примитивное движение от физического входного сигнала. Сигнал обеспечивает желаемую траекторию следящего кадра относительно к базовой раме по оси примитива шарнира. Рассчитывается автоматическиСовместное примитивное движение из автоматического расчета. Симскейп Многотельные вычисления и применяет совместное примитивное движение на основе динамики модели.
Примитив вращения: определение
Выберите переменные для измерения в примитиве вращения шарнира. При выборе переменной открывается физический сигнальный порт, который выводит
измеряемая величина как функция времени. Каждая величина измеряется
для ведомой рамы относительно базовой рамы. Это решено
в базовой раме. Вы можете использовать сигналы измерения для анализа
или как вход в систему управления.
При выборе переменной открывается физический сигнальный порт, который выводит
измеряемая величина как функция времени. Каждая величина измеряется
для ведомой рамы относительно базовой рамы. Это решено
в базовой раме. Вы можете использовать сигналы измерения для анализа
или как вход в систему управления.
- Позиция
Выберите этот параметр для определения относительного угла поворота ведомая рама относительно базовой рамы вокруг примитива соединения ось.
- Скорость
Выберите эту опцию для измерения относительной угловой скорости ведомая рама по отношению к базовой раме вокруг соединения примитивная ось.
- Ускорение
Выберите этот параметр для определения относительного углового ускорения ведомой рамы относительно базовой рамы вокруг шарнира примитивная ось.
- Крутящий момент привода
Выберите этот параметр, чтобы определить момент срабатывания, действующий на ведомая рама относительно базовой рамы вокруг примитива соединения ось.

Призматический примитив: цели состояния
Укажите призматические примитивы состояния и их приоритет уровни. Целевое состояние — это желаемое значение для одного из совместных состояний. параметры — положение и скорость. Уровень приоритета – это относительная важность государственной цели. Он определяет, насколько точно цель должна быть достигнута. Используйте инструмент Model Report в Mechanics Explorer для проверки состояния сборки для каждой цели совместного состояния.
- Укажите целевое положение
Выберите этот параметр, чтобы указать желаемое исходное положение соединения в нулевое время. Это относительное положение, измеренное вдоль сустава. примитивная ось, начало координат ведомой рамы относительно основания происхождение кадра. Указанная цель разрешена в базовом кадре. При выборе этого параметра отображаются поля приоритета и значения.
- Указать целевую скорость
Выберите этот параметр, чтобы указать желаемую скорость примитива соединения в нулевое время.
 Это относительная скорость, измеренная вдоль сустава
примитивная ось, начало координат ведомой рамы относительно основания
происхождение кадра. Он решен в базовой рамке. Выбор этой опции
предоставляет поля приоритета и значения.
Это относительная скорость, измеренная вдоль сустава
примитивная ось, начало координат ведомой рамы относительно основания
происхождение кадра. Он решен в базовой рамке. Выбор этой опции
предоставляет поля приоритета и значения.- Приоритет
Выберите приоритет цели состояния. Это уровень важности, присвоенный до государственной цели. Если все цели состояния не могут быть одновременно удовлетворены, уровень приоритета определяет, какие цели должны быть удовлетворены во-первых, и как близко их удовлетворить. Этот вариант подходит для обоих целевые значения состояния положения и скорости.
Уровень приоритета Описание High (desired)Satisfy state target precisely Low (approximate)Satisfy state target approximately
- Value
Enter the state target numerical value .
 По умолчанию
По умолчанию 0. Выберите или введите физическую единицу измерения. По умолчаниюмдля положение им/сдля скорости.
Призматический примитив: внутренняя механика
Укажите внутреннюю механику призматического примитива. Внутренний
механика включает линейные пружинные силы, учет запаса энергии,
и силы демпфирования с учетом рассеяния энергии. Вы можете игнорировать
внутренняя механика за счет сохранения жесткости пружины и коэффициента демпфирования
значения по адресу 0 .
- Положение равновесия
Введите положение равновесия пружины. это расстояние между базовой и толкающей рамами, в которых усилие пружины равен нулю. Значение по умолчанию – 9.0100 0 . Выберите или введите физическая единица. По умолчанию
м.- Жесткость пружины
Введите линейную жесткость пружины. Это сила, необходимая сместить примитив сустава на единицу расстояния.
 По умолчанию
По умолчанию 0. Выберите или введите физическую единицу измерения. По умолчаниюН/м.- Коэффициент демпфирования
Введите коэффициент линейного демпфирования. Это сила, необходимая поддерживать постоянную совместную примитивную скорость между основанием и толкателем кадры. По умолчанию
0. Выберите или введите физическое единица. По умолчаниюН/(м/с).
Призматический примитив: Ограничения
Ограничение диапазона движения суставного примитива. Совместные ограничения используют пружинные демпферы для
сопротивляться перемещению за пределы диапазона. Совместный примитив может иметь нижнюю границу,
верхняя граница, оба или, в состоянии по умолчанию, ни один. Чем жестче пружина, тем жестче
останавливаться или подпрыгивать, если возникают колебания. Чем сильнее демпфер, тем больше вязкость
потери, которые постепенно уменьшают контактные колебания или, в передемпфированных примитивах, удерживают их
от формирования вообще.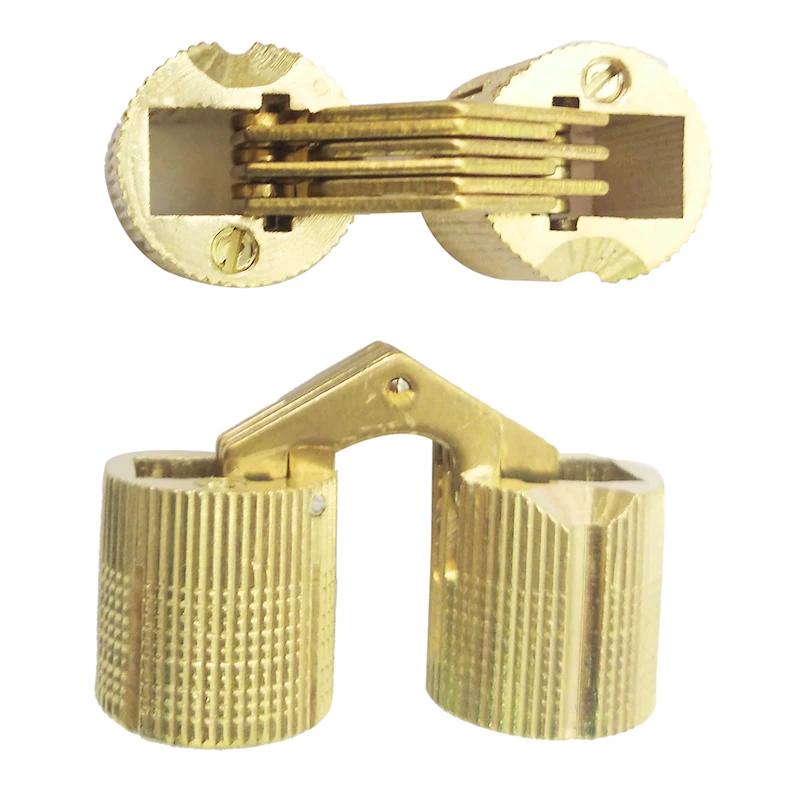
- Указать нижний предел
Выберите, чтобы добавить нижнюю границу диапазона движения примитива соединения.
- Задать верхний предел
Выберите, чтобы добавить верхнюю границу диапазона движения примитива соединения.
- Значение
Место, мимо которого следует сопротивляться совместному перемещению. Местоположение является смещением от основание к толкателю, измеренное в базовой раме, с которой начинается контакт. Это расстояние по оси в призматических примитивах, угол вокруг оси в вращающиеся примитивы и угол между двумя осями в сферических примитивах.
- Жесткость пружины
Сопротивление контактной пружины смещению за пределы соединения. пружина линейна, а ее жесткость постоянна. Чем больше значение, тем сложнее остановка.
 Отношение усилия пружины к усилиям демпфера определяет, будет ли стопор
недостаточно демпфирован и склонен к колебаниям при контакте.
Отношение усилия пружины к усилиям демпфера определяет, будет ли стопор
недостаточно демпфирован и склонен к колебаниям при контакте.- Коэффициент демпфирования
Сопротивление контактного демпфера перемещению за пределы соединения. Демпфер линейна, а ее коэффициент постоянен. Чем больше значение, тем больше вязкие потери, которые постепенно уменьшают контактные колебания, если таковые возникают. пропорция усилия пружины к силе демпфера определяет, является ли упор недостаточно демпфированным и склонны к колебаниям при контакте.
- Переходная область
Область, в которой усилие пружины-демпфера увеличивается до полного значения. область — это расстояние вдоль оси в призматических примитивах, угол вокруг ось в вращающихся примитивах и угол между двумя осями в сферических примитивы.
Чем меньше область, тем острее начало контакта и меньше временной шаг, требуемый от решателя. В компромиссе между точностью моделирования и скорость моделирования, уменьшение области перехода повышает точность, в то время как расширение увеличивает скорость.
Призматический примитив: Приведение в действие
Укажите параметры приведения в действие примитива призматического соединения.
Режимы срабатывания включают Force и Motion .
Выбор Предоставлено входом из раскрывающегося списка
список для режима срабатывания добавляет соответствующий физический сигнал
порт на блок. Используйте этот порт, чтобы указать входной сигнал. Активация
сигналы разрешаются в основном кадре.
- Сила
Выберите настройку силы срабатывания. Значение по умолчанию – 9.0100 Нет .
Настройка силы срабатывания Описание НетНет
Обеспечивается входомСила срабатывания от входа физического сигнала. Сигнал обеспечивает сила, действующая на ведомую раму по отношению к базовой раме вдоль первичной оси сустава. На него действует равная и противоположно направленная сила базовая рама. Рассчитывается автоматическиСила срабатывания из автоматического расчета. Симскейп Многотельные вычисления и применяет силу срабатывания на основе динамики модели. - Движение
Выберите настройку движения срабатывания. По умолчанию установлено значение
. Автоматически Вычислено.Настройка движения срабатывания Описание Предоставляется входомСовместное примитивное движение от физического входного сигнала.  Сигнал
обеспечивает желаемую траекторию следящего кадра относительно
к базовой раме по оси примитива шарнира.
Сигнал
обеспечивает желаемую траекторию следящего кадра относительно
к базовой раме по оси примитива шарнира.Рассчитывается автоматическиСовместное примитивное движение из автоматического расчета. Симскейп Многотельные вычисления и применяет совместное примитивное движение на основе динамики модели.
Призматический примитив: определение
Выберите переменные для измерения в примитиве призматического соединения. При выборе переменной открывается физический сигнальный порт, который выводит измеряемая величина как функция времени. Каждая величина измеряется для ведомой рамы относительно базовой рамы. Это решено в базовой раме. Вы можете использовать сигналы измерения для анализа или как вход в систему управления.
- Позиция
Выберите эту опцию для определения относительного положения следящего устройства. начало рамы относительно начала базовой рамы вдоль соединения примитивная ось.

- Скорость
Выберите эту опцию для определения относительной скорости следящего устройства начало рамы относительно начала базовой рамы вдоль соединения примитивная ось.
- Ускорение
Выберите этот параметр для определения относительного ускорения начало координат ведомого кадра по отношению к началу основного кадра вдоль суставная примитивная ось.
- Сила привода
Выберите эту опцию для определения силы срабатывания, действующей на ведомый кадр относительно базового кадра вдоль примитива соединения ось.
Конфигурация режима
Укажите режим соединения. Совместный режим может быть нормальным или отключенным на протяжении симуляции, или вы можете предоставить входной сигнал для изменения режима во время симуляции.
- Режим
Выберите один из следующих параметров, чтобы задать режим соединения. Значение по умолчанию
Обычный.
Метод Описание НормальныйСоединение ведет себя нормально во время моделирования. ОтключеноСоединение отсоединено на протяжении всей симуляции. Предоставляется входомЭтот параметр предоставляет порт режима , который вы можете подключить на входной сигнал, чтобы изменить режим соединения во время моделирования. Сустав режим нормальный, когда входной сигнал равен 0и отключается, когда входной сигнал-1. Совместный режим может быть изменен многими раз во время моделирования.
Комбинированное измерение силы/крутящего момента
Выберите составные силы и крутящие моменты для измерения. Их измерения охватывают все суставы
примитивы и не относятся ни к одному из них. Они бывают двух видов: ограничения и тотальные.
Их измерения охватывают все суставы
примитивы и не относятся ни к одному из них. Они бывают двух видов: ограничения и тотальные.
Измерения ограничений дают сопротивление движению на заблокированных осях соединение. Например, в призматических соединениях, которые запрещают перемещение в плоскости xy, сопротивление уравновешивает все возмущения в направлениях x и y. Суммарные измерения дают сумма всех сил и крутящих моментов, вызванных приводными входами, внутренними пружинами и демпферами, соединением пределы положения и кинематические ограничения, которые ограничивают степени свободы соединение.
- Направление
Вектор, определяемый по паре действие-противодействие между базой и ведомым устройством кадры. Пара возникает из третьего закона движения Ньютона, который для соединения блок требует, чтобы сила или крутящий момент на ведомой раме сопровождались равным и противоположная сила или крутящий момент на базовой раме.
 Укажите, ощущать ли это
воздействие базовой рамы на ведомую раму или воздействие толкателя
рама на базовой раме.
Укажите, ощущать ли это
воздействие базовой рамы на ведомую раму или воздействие толкателя
рама на базовой раме.- Кадр разрешения
Кадр, в котором разрешаются компоненты вектора измерения. Кадры с разные ориентации дают разные компоненты вектора для одного и того же измерение. Укажите, следует ли получать эти компоненты от осей базы рамы или от осей ведомой рамы. Выбор имеет значение только в стыках с вращательными степенями свободы.
- Ограничивающая сила
Динамическая переменная для измерения. Ограничение вызывает встречное перемещение на заблокировал оси сустава, позволяя ему находиться на свободных осях его примитивов. Выберите для вывода вектора ограничительной силы через порт фк .
- Ограничение момента
Динамическая переменная для измерения.
 Ограничивающие моменты встречного вращения на заблокированном
осей сустава, допуская его на свободных осях его примитивов. Выбирать
для вывода вектора ограничивающего крутящего момента через порт тк .
Ограничивающие моменты встречного вращения на заблокированном
осей сустава, допуская его на свободных осях его примитивов. Выбирать
для вывода вектора ограничивающего крутящего момента через порт тк .- Общая сила
Измеряемая динамическая переменная. Полная сила представляет собой сумму по всем суставам. примитивы над всеми источниками — исполнительные входы, внутренние пружины и демпферы, ограничения положения суставов и кинематические ограничения. Выберите, чтобы вывести итог вектор силы через порт футов .
- Общий крутящий момент
Динамическая переменная для измерения. Общий крутящий момент представляет собой сумму по всем суставам. примитивы над всеми источниками — исполнительные входы, внутренние пружины и демпферы, ограничения положения суставов и кинематические ограничения.
 Выберите, чтобы вывести итог
вектор крутящего момента через порт тт .
Выберите, чтобы вывести итог
вектор крутящего момента через порт тт .
Порты
Этот блок имеет два порта фрейма. Он также имеет дополнительный физический сигнальные порты для указания входов срабатывания и измерения динамических переменные, такие как силы, крутящие моменты и движение. Вы предоставляете необязательный порт, установив флажок обнаружения, соответствующий этому порту.
Порты рамы
B — Базовая рама
F — Следящая рама
Порты активации
Примитив призматического соединения обеспечивает следующее срабатывание порты:
Примитив вращательного соединения обеспечивает следующее порты активации:
Порты датчиков
Примитив призматического соединения обеспечивает следующие датчики порты:
pz — Положение примитива Z призматического шарнира
vz — Скорость примитива Z призматического шарнира
az — Ускорение Z призматического шарнира примитив
fz — Сила срабатывания, действующая на призму Z сустав примитив
flllz — Сила от контакта с нижним пределом призматической оси Z шарнирный примитив
fulz — Сила от контакта с верхним пределом призматической оси Z шарнирный примитив
Примитив вращательного соединения обеспечивает следующее сенсорные порты:
qz — Угловое положение шарнирного соединения Z примитив
wz — Угловая скорость вращательного шарнира Z примитив
bz — Угловое ускорение вращения Z шарнирный примитив
tz — Момент срабатывания, действующий на вращение Z шарнирный примитив
tllz — Крутящий момент из-за контакта с нижним пределом вращения Z шарнирный примитив
tulz — Крутящий момент из-за контакта с верхним пределом вращения Z примитив соединения
Следующие сенсорные порты обеспечивают комбинированные силы и крутящие моменты, действующие на соединение:
Порт режима
Конфигурация режима обеспечивает следующий порт:
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью Simulink® Coder™.

История версий
Представлено в R2012a
См. также
Призматический шарнир | Revolute Joint
Темы
- Приведение в действие и определение с помощью физических сигналов
- Определение движения
- Измерение вращения
- Поступательные измерения
- Использование соединительного блока ходового винта — линейный привод
Вы щелкнули ссылку, соответствующую этой команде MATLAB:
Запустите команду, введя ее в командном окне MATLAB. Веб-браузеры не поддерживают команды MATLAB.
Выберите веб-сайт, чтобы получить переведенный контент, где он доступен, и ознакомиться с местными событиями и предложениями. В зависимости от вашего местоположения мы рекомендуем вам выбрать: .
Вы также можете выбрать веб-сайт из следующего списка:
Европа
Обратитесь в местный офис
Цилиндрический
Цилиндрический шарнир — кинематическая пара с двумя степенями свободы, используемая в механизмах. Цилиндрические шарниры обеспечивают одну функцию перемещения и одну функцию вращения. Они обычно используются
во многих местах, таких как трубки и штоки амортизаторов и пары гидравлический цилиндр/шток.
Цилиндрические шарниры обеспечивают одну функцию перемещения и одну функцию вращения. Они обычно используются
во многих местах, таких как трубки и штоки амортизаторов и пары гидравлический цилиндр/шток.
- Если панель «Соединения» в данный момент не отображается, выберите нужное соединение,
щелкнув по нему в Диспетчере проектов или в окне моделирования.
Панель «Соединения» отображается автоматически.
- На вкладке «Подключение» нажмите «Тело». 1 и выберите тело в окне моделирования или дважды щелкните Тело 1, чтобы открыть дерево модели (из которого можно выбрать нужное тело). выбран).
- Точно так же щелкните Тело 2 и выберите нужное тело в окне моделирования (или используйте дерево модели).
- Щелкните точку
коллектор (в разделе «Начало») и выберите точку в окне моделирования или дважды щелкните значок
Коллектор точек, чтобы открыть дерево модели (из которого можно выбрать нужную точку).

- Укажите ось выравнивания для соединения.
- Точка — выберите точку, лежащую на желаемую ось выравнивания в окне моделирования или дважды щелкните Точка и выберите точку из Модельное дерево.
- Вектор — если ось выравнивания для соединения вдоль любой из глобальных осей, то можно выбрать глобальные оси x, y или z. щелкнув нужную ось в окне моделирования (или дважды щелкнув Вектор и просмотрев дерево модели).
- Задайте начальные условия.
- Перейдите на вкладку «Начальные условия» в панель.
- Активировать перевод и/или
Флажки поворота.
