Кинематика вращательного движения
Лекция
Кинематика вращательного движения
План
Тангенциальное и нормальное ускорение
Радиус кривизны траектории
Угловая скорость, вектор угла поворота, угловое ускорение
Связь линейной и угловой скорости
Связь линейных и угловых характеристик
1. Тангенциальное и нормальное ускорение
Две составляющие ускорения: тангенциальное ускорение и нормальное ускорение.
Тангенциальное ускорение направлено по касательной к траектории
Нормальное ускорение направлено по нормали к траектории
Тангенциальное ускорение характеризует изменение скорости по величине. Если скорость по величине не изменяется, то тангенциальная составляющая равна нулю, а нормальная составляющая ускорения равна полному ускорению.
Нормальное ускорение характеризует изменение скорости по направлению. Если направление скорости не изменяется, движение происходит по прямолинейной траектории.
В общем случае полное ускорение:
Итак, нормальная составляющая вектора ускорения

Чтобы выяснить
свойства нормального ускорения, надо
установить, чем определяется  ,
т.е быстрота изменения со временем
направления касательной к траектории.
Она тем больше (
,
т.е быстрота изменения со временем
направления касательной к траектории.
Она тем больше ( ),
чем больше искривлена траектория и чем
быстрее перемещается частица по
траектории.
),
чем больше искривлена траектория и чем
быстрее перемещается частица по
траектории.
2. Радиус кривизны траектории
Радиус кривизны – это радиус окружности, которая сливается в данном месте с кривой на бесконечно малом её участке.


3. Угловая скорость, вектор угла поворота, угловое ускорение.
Любой поворот полностью определяется указанием оси вращения и угла поворота Δφ относительно этой оси. Если поворот осуществляется на малый угол
Вектор  направлен вдоль оси вращения, т.е.
перпендикулярно плоскости, в которой
происходит вращение.
направлен вдоль оси вращения, т.е.
перпендикулярно плоскости, в которой
происходит вращение.
Ориентация этого вектора определяется правилом буравчика.
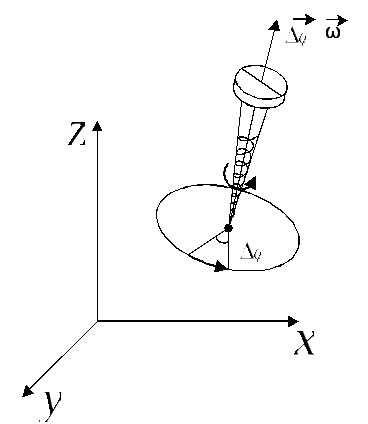
Абсолютное
значение вектора  равно углу поворота Δφ.
равно углу поворота Δφ.

Для того, чтобы величин была вектором, она должна не только направление и абсолютное значение, но и удовлетворять правилу сложения векторов. Это можно показать, что при векторном сложении двух углов поворота правило параллелограмма не выполняется. Оно будет справедливо лишь для малого
Δφ << 2π  — неполный вектор.
— неполный вектор.
Угловой скоростью
называется вектор  ,
направление которого: определяет
ориентацию плоскости вращения и по
правилу буравчика направление вращения.
,
направление которого: определяет
ориентацию плоскости вращения и по
правилу буравчика направление вращения.
Модуль вектора  равен производной от угла поворота по
времени:
равен производной от угла поворота по
времени:
Угловая скорость, в отличие от угла поворота, является полным вектором.
Вектор 
Пусть за 
Изменение вектора угловой скорости со временем характеризуется величиной угловое ускорение:
Ускоренное 
Замедленное 
Модуль углового
ускорения измеряется в 
Угловое ускорение также как и угловая скорость – псевдовектор.
 связывается с направлением вращения
тела.
связывается с направлением вращения
тела.4. Связь линейной и угловой скорости
Пусть за малый Δt тело повернулось на Δφ. Пусть точки за

Модуль линейной скорости
Связь векторов
линейной и угловой скоростей: положение
точки определяется радиусом-вектором  , вектор
, вектор  из
рисунка определяется как векторное
произведение
из
рисунка определяется как векторное
произведение  и
и 
Изменение
радиуса-вектора  со временем только по направлению
называется прецессией.
со временем только по направлению
называется прецессией.
5. Связь линейных и угловых характеристик
studfiles.net
Вращательное движение (движение тела по окружности) | Формулы и расчеты онлайн
Законы, определяющие движение тела по окружности, аналогичны законам поступательного движения. Уравнения, описывающие вращательное движение, можно вывести из уравнений поступательного движения, произведя в последних следующие замены:
Если:
перемещение s — угловое перемещение (угол поворота) φ,
скорость u — угловая скорость ω,
ускорение a — угловое ускорение α
Вращательное движение, характеристики
| Вращательное движение | Угловая скорость | Угловое ускорение |
|---|---|---|
| Равномерное | Постоянная | Равно нулю |
| Равномерно ускоренное | Изменяется равномерно | Постоянно |
| Неравномерно ускоренное | Изменяется неравномерно | Переменное |
Угол поворота
Во всех уравнения вращательного движения углы задаются в радианах, сокращенно (рад).
Если
φ — угловое перемещение в радианах,
s — длина дуги, заключенной
между сторонами угла поворота,
r — радиус,
то по определению радиана
\[ φ = \frac{s}{r} \]
Соотношение между единицами угла
\[ \frac[-1.35]{φ_{рад}}{φ_{°}} = \frac[-1.2]{π}{180°} \]
$ 1 рад = 57.3° $ | $ 1° = 17.45 мрад $ | $ 1´ = 291 мкрад $ |
Обратите внимание: Наименование единицы радиан (рад) обычно указывается в формулах только в тех случаях, когда ее можно спутать с градусом. Поскольку радиан равен отношению длин двух отрезков
(1рад = 1м/ 1м = 1), он не имеет размерности.
Соотношение между угловой скоростью, угловым перемещением и временем для всех видов движения по окружности наглядно видны на графике угловой скорости (зависимость ω от t). Поэтому графику можно определить, какой угловой скоростью обладает тело в тот или иной момент времени и на какой угол с момента начала движения оно повернулось (он характеризуется площадью под кривой).
Кроме того, для представления соотношений между названными величинами используют график углового перемещения (зависимость φ от t) и график углового ускорения (зависимость α от t).
Число оборотов
Характеристикой всех видов вращения является число оборотов n или равноценная ей характеристика — частота f. Обе величины характеризуют число оборотов в единицу времени.
Единица СИ частоты (или числа оборотов)
\[ [n] = [f] = \frac{Обороты}{Секунда} = \frac{(об)}{с} = \frac{1}{c} = Герц \]
В технике число оборотов обычно измеряется в оборотах в минуту (об/мин) = 1/мин.
Таким образом, величина, обратная числу оборотов, есть продолжительность одного оборота.
Если
n — число оборотов,
f — частота,
T — продолжительность одного оборота, период,
φ — угловое перемещение,
N — полное число оборотов,
t — время, продолжительность вращения,
ω — угловая частота,
то
Период
\[ T = \frac{1}{f} = \frac{1}{n} \]
Угловое перемещение
Угловое перемещение равно произведению полного числа оборотов на 2π:
\[ φ = 2 π N \]
Угловая скорость
Из формулы для одного оборота следует:
\[ ω = 2 π f = \frac{2π}{T} \]
Обратите внимание:
• формулы (1)—(6) справедливы для всех видов вращательного движения — как для равномерного движения, так и для ускоренного. В них могут входить постоянные величины, средние значения, начальные и конечные значения, а также любые мгновенные значения.
• вопреки своему названию число оборотов n — это не число, а физическая величина.
• следует различать число оборотов n и полное число оборотов N.
В помощь студенту
Вращательное движение (движение тела по окружности) |
стр. 421 |
|---|
www.fxyz.ru
3)Угол поворота, угловые скорость и ускорение. Уравнение вращательного движения. Полное ускорение, центростремительное, тангенсальное. Связь вращательных их линейных величин.
Угол поворота — это физическая величина, характеризующая поворот тела, или поворот луча, исходящего из центра вращения тела, относительно другого луча, считающегося неподвижным.
Угловой скоростью называется векторная величина, равная первой производной угла поворота тела по времени:
Линейная скорость точки
Если ( = const, то вращение равномерное и его можно характеризовать периодом вращения T — временем, за которое точка совершает один полный оборот, т.е. поворачивается на угол 2p. Так как промежутку времени Dt = T соответствует = 2p, то = 2p/T, откуда
Число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени называется частотой вращения:
откуда
Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени:
При вращении тела вокруг неподвижной оси вектор углового ускорения направлен вдоль оси вращения в сторону вектора элементарного приращения угловой скорости. При ускоренном движении вектор сонаправлен вектору (рис.8), при замедленном — противонаправлен ему (рис.9).
Тангенциальная составляющая ускорения
Нормальная составляющая ускорения
Основое уравнение динамики вращательного движения материальной точки — угловое ускорение точки при ее вращении вокруг неподвижной оси пропорционально вращающему моменту и обратно пропорционально моменту инерции.
Taк как вектор скорости направлен по касательной к траектории, то вектор Dvn, перпендикулярный вектору скорости, направлен к центру ее кривизны. Вторая составляющая ускорения, равная
называется нормальной составляющей ускорения и направлена по нормали к траектории к центру ее кривизны (поэтому ее называют также центростремительным ускорением).
Полное ускорение тела есть геометрическая сумма тангенциальной и нормальной составляющих (рис.5):
Итак, тангенциальная составляющая ускорения характеризует быстроту изменения скорости по модулю (направлена по касательной к траектории), а нормальная составляющая ускорения — быстроту изменения скорости по направлению (направлена к центру кривизны траектории).
В зависимости от тангенциальной и нормальной составляющих ускорения движение можно классифицировать следующим образом:
1) , аn = 0 — прямолинейное равномерное движение;
2) , аn = 0 — прямолинейное равнопеременное движение. При таком виде движения
Если начальный момент времени t1=0, а начальная скорость v1=v0, то, обозначив t2=t и v2=v, получим , откуда
Проинтегрировав эту формулу в пределах от нуля до произвольного момента времени t, найдем, что длина пути, пройденного точкой, в случае равнопеременного движения
3) , аn = 0 — прямолинейное движение с переменным ускорением;
4) , аn = const. При скорость по модулю не изменяется, а изменяется по направлению. Из формулы an=v2/r следует, что радиус кривизны должен быть постоянным. Следовательно, движение по окружности является равномерным;
5) , — равномерное криволинейное движение;
6) , — криволинейное равнопеременное движение;
7) , — криволинейное движение с переменным ускорением.
Понятно, что линейные и соответствующие им угловые величины должны быть определенным образом связаны между собой. Найдем эти связи.
При повороте радиуса, проведенного в точку М (см. рис. 2), на угол φ точка пройдет по дуге окружности путь
. (1)
За малое время Δt точка проходит расстояние , где φ2 и φ1 — углы поворота в конце и в начале интервала Δt. Разделив последнее равенство на Δt и учитывая, что и , получим
. (2)
Заметим, что соотношение (2) связывает между собой линейную и угловую скорости не только при равномерном движении точки по окружности, но- и при неравномерном движении тоже. Изменение модуля скорости точки за время Δt есть , где ω2 и ω1 — угловые скорости в конце и в начале промежутка Δt. Разделим последнее равенство на Δt и учтем, что и , тогда касательное ускорение
. (3)
Соотношения (1), (2) и (3) дают для движущейся по окружности точки простую связь между линейными и угловыми величинами: линейная величина равна произведению радиуса окружности на соответствующую угловую величину. Эти соотношения получены нами для конкретной точки М колеса троллейбуса, но они справедливы и для любой другой точки вращающегося (как равномерно, так и неравномерно) тела.
dtzis1-3.narod2.ru
§ 4. Угловая скорость и угловое ускорение
Рассмотрим твердое тело, которое вращается вокруг неподвижной оси. Тогда отдельные точки этого тела будут описывать окружности разных радиусов, центры которых лежат на оси вращения. Пусть некоторая точка движется по окружности радиуса R (рис.6). Ее положение через промежуток времени t зададим углом . Элементарные (бесконечно малые) углы поворота рассматривают как векторы. Модуль вектора d равен углу поворота, а его направление совпадает с направлением поступательного движения острия винта, головка которого вращается в направлении движения точки по окружности, т. е. подчиняется правилу правого, винта (рис.6). Векторы, направления которых связываются с направлением вращения, называются псевдовекторами или аксиальными векторами. Эти векторы не имеют определенных точек приложения: они могут откладываться из любой точки оси вращения.
Угловой скоростью называется векторная величина, равная первой производной угла поворота тела по времени:
Вектор «в направлен вдоль оси вращения по правилу правого винта, т. е. так же, как и вектор d (рис. 7). Размерность угловой скорости dim=T-1, a . ее единица — радиан в секунду (рад/с).
Линейная скорость точки (см. рис. 6)
В векторном виде формулу для линейной скорости можно написать как векторное произведение:
При этом модуль векторного произведения, по определению, равен
, а направление совпадает с направлением поступательного движения правого винта при его вращении от к R.
Если =const, то вращение равномерное и его можно характеризовать периодом вращения Т — временем, за которое точка совершает один полный оборот, т. е. поворачивается на угол 2. Так как промежутку времени t=T соответствует =2, то = 2/Т, откуда
Число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени называется частотой вращения:
Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени:
При вращении тела вокруг неподвижной оси вектор углового ускорения направлен вдоль оси вращения в сторону вектора элементарного приращения угловой скорости. При ускоренном движении вектор
13
сонаправлен вектору (рис.8), при замедленном.— противонаправлен ему (рис. 9).
Тангенциальная составляющая ускорения
Нормальная составляющая ускорения
Таким образом, связь между линейными (длина пути s, пройденного точкой по дуге окружности радиуса R, линейная скорость v, тангенциальное ускорение а, нормальное ускорение аn) и угловыми величинами (угол поворота , угловая скорость (о, угловое ускорение ) выражается следующими формулами:
В случае равнопеременного движения точки по окружности (=const)
где 0 — начальная угловая скорость.
Контрольные вопросы
• Что называется материальной точкой? Почему в механике вводят такую модель?
• Что такое система отсчета?
• Что такое вектор перемещения? Всегда ли модуль вектора перемещения равен отрезку пути,
пройденному точкой?
• Какое движение называется поступательным? вращательным?
• Дать определения векторов средней скорости и среднего ускорения, мгновенной скорости
и мгновенного ускорения. Каковы их направления?
• Что характеризует тангенциальная составляющая ускорения? нормальная составляющая
ускорения? Каковы их модули?
• Возможны ли движения, при которых отсутствует нормальное ускорение? тангенциальное
ускорение? Приведите примеры.
• Что называется угловой скоростью? угловым ускорением? Как определяются их направления?
• Какова связь между линейными и угловыми величинами?
Задачи
1.1. Зависимость пройденного телом пути от времени задается уравнением s = A+Вt+Сt2+Dt3 (С = 0,1 м/с2, D = 0,03 м/с3). Определить: 1) через какое время после начала движения ускорение а тела будет равно 2 м/с2; 2) среднее ускорение <а> тела за этот промежуток времени. [ 1) 10 с; 2) 1,1 м/с2]
1.2. Пренебрегая сопротивлением воздуха, определить угол, под которым тело брошено к горизонту, если максимальная высота подъема тела равна 1/4 дальности его полета. [45°]
1.3. Колесо радиуса R = 0,1 м вращается так, что зависимость угловой скорости от времени задается уравнением = 2At+5Вt4 (A=2 рад/с2 и B=1 рад/с5). Определить полное ускорение точек обода колеса через t=1 с после начала вращения и число оборотов, сделанных колесом за это время. [а = 8,5 м/с2; N = 0,48]
14
1.4. Нормальное ускорение точки, движущейся по окружности радиуса r=4 м, задается уравнением аn=А+-Bt+Ct2 (A=1 м/с2, В=6 м/с3, С=3 м/с4). Определить: 1) тангенциальное ускорение точки; 2) путь, пройденный точкой за время t1=5 с после начала движения; 3) полное ускорение для момента времени t2=1 с. [ 1) 6 м/с2; 2) 85 м; 3) 6,32 м/с2]
1.5. Частота вращения колеса при равнозамедленном движении за t=1 мин уменьшилась от 300 до 180 мин-1. Определить: 1) угловое ускорение колеса; 2) число полных оборотов, сделанных колесом за это время. [1) 0,21 рад/с2; 2) 360]
1.6. Диск радиусом R=10 см вращается вокруг неподвижной оси так, что зависимость угла поворота радиуса диска от времени задается уравнением =A+Bt+Ct2+Dt3 (B = l рад/с, С=1 рад/с2, D=l рад/с3). Определить для точек на ободе колеса к концу второй секунды после начала движения: 1) тангенциальное ускорение а; 2) нормальное ускорение аn; 3) полное ускорение а. [ 1) 0,14 м/с2; 2) 28,9 м/с2; 3) 28,9 м/с2]
studfiles.net
Как определить угол поворота 🚩 угол поворота определение 🚩 Естественные науки
Автор КакПросто!
Угол поворота представляет собой основную физическую величину, которая характеризует такое движение тела или луча, при котором одна из его точек остается неподвижной. Соответственно этот угол определяется именно относительно неподвижной точки. Данная величина имеет свои единицу и размерность.
Статьи по теме:
Инструкция
В современной физике угол поворота, как физическая величина, оценивается в единицах плоского угла. С целью определения значения плоского угла φ используют уравнения, принятые в математике. В данном контексте можно применить один из двух ниже приведенных вариантов.Первый способ: φ = s/RЗдесь s обозначает длину дуги окружности, а R – длину радиуса окружности.Второй способ – воспользоваться уравнением обратной тригонометрической функции, которое выглядит следующим образом: φ = arctg (a/b), где b и a есть не что иное как соответствующие длины катетов прямоугольного треугольника.
При оценке угла поворота, применяя математические условия, в физике делается одна малозаметная замена, однако такой подход в свою очередь имеет определенные последствия. Дело в том, что, пытаясь оценить угол поворота вращающегося тела, на практике оценивается путь, который пройден по дуге окружности какой-либо точкой этого тела, что является подменой одной физической величины на другую, а именно в данном конкретном случае заменяется вращательная форма движения на орбитальную.В современной физике единицей измерения угла поворота принято считать «рад». Более спорной темы, чем вопрос относительно того, безразмерной или размерной, производной или же основной величиной является угол поворота, в современной физике найти пока довольно сложно.
Но вопросы остаются все равно, главными из которых являются следующие: почему в физике отсутствует уравнение, определяющее угол поворота по основным физическим величинам, если он является производной физической величиной; почему угол поворота имеет свою единицу измерения в СИ, если его принято считать безразмерной величиной.
Источники:
- угол поворота определение
Совет полезен?
Распечатать
Как определить угол поворота
Статьи по теме:
Не получили ответ на свой вопрос?
Спросите нашего эксперта:
www.kakprosto.ru
Движение по окружности, угловая скорость, частота, период, центростремительное ускорение. Формулы, определения, пояснения
Тестирование онлайн
Так как линейная скорость равномерно меняет направление, то движение по окружности нельзя назвать равномерным, оно является равноускоренным.
Угловая скорость
Выберем на окружности точку 1. Построим радиус. За единицу времени точка переместится в пункт 2. При этом радиус описывает угол. Угловая скорость численно равна углу поворота радиуса за единицу времени.
Период и частота
Период вращения T — это время, за которое тело совершает один оборот.
Частота вращение — это количество оборотов за одну секунду.
Частота и период взаимосвязаны соотношением
Связь с угловой скоростью
Линейная скорость
Каждая точка на окружности движется с некоторой скоростью. Эту скорость называют линейной. Направление вектора линейной скорости всегда совпадает с касательной к окружности. Например, искры из-под точильного станка двигаются, повторяя направление мгновенной скорости.
Рассмотрим точку на окружности, которая совершает один оборот, время, которое затрачено — это есть период T. Путь, который преодолевает точка — это есть длина окружности.
Центростремительное ускорение
При движении по окружности вектор ускорения всегда перпендикулярен вектору скорости, направлен в центр окружности.
Используя предыдущие формулы, можно вывести следующие соотношения
Точки, лежащие на одной прямой исходящей из центра окружности (например, это могут быть точки, которые лежат на спице колеса), будут иметь одинаковые угловые скорости, период и частоту. То есть они будут вращаться одинаково, но с разными линейными скоростями. Чем дальше точка от центра, тем быстрей она будет двигаться.
Закон сложения скоростей справедлив и для вращательного движения. Если движение тела или системы отсчета не является равномерным, то закон применяется для мгновенных скоростей. Например, скорость человека, идущего по краю вращающейся карусели, равна векторной сумме линейной скорости вращения края карусели и скорости движения человека.
Земля участвует в двух основных вращательных движениях: суточном (вокруг своей оси) и орбитальном (вокруг Солнца). Период вращения Земли вокруг Солнца составляет 1 год или 365 суток. Вокруг своей оси Земля вращается с запада на восток, период этого вращения составляет 1 сутки или 24 часа. Широтой называется угол между плоскостью экватора и направлением из центра Земли на точку ее поверхности.
Согласно второму закону Ньютона причиной любого ускорения является сила. Если движущееся тело испытывает центростремительное ускорение, то природа сил, действием которых вызвано это ускорение, может быть различной. Например, если тело движется по окружности на привязанной к нему веревке, то действующей силой является сила упругости.
Если тело, лежащее на диске, вращается вместе с диском вокруг его оси, то такой силой является сила трения. Если сила прекратит свое действие, то далее тело будет двигаться по прямой
Рассмотрим перемещение точки на окружности из А в В. Линейная скорость равна vA и vB соответственно. Ускорение — изменение скорости за единицу времени. Найдем разницу векторов.

Разница векторов есть . Так как , получим
В системе отсчета, связанной с колесом, точка равномерно вращается по окружности радиуса R со скоростью , которая изменяется только по направлению. Центростремительное ускорение точки направлено по радиусу к центру окружности.
Теперь перейдем в неподвижную систему, связанную с землей. Полное ускорение точки А останется прежним и по модулю, и по направлению, так как при переходе от одной инерциальной системы отсчета к другой ускорение не меняется. С точки зрения неподвижного наблюдателя траектория точки А — уже не окружность, а более сложная кривая (циклоида), вдоль которой точка движется неравномерно.
Мгновенная скорость определяется по формуле
fizmat.by
УГОЛ ПОВОРОТА — это… Что такое УГОЛ ПОВОРОТА?
- УГОЛ ПОВОРОТА
- УГОЛ ПОВОРОТА
внешний угол между направлениями прямых участков жел.-дор. пути при поворотах трассы. У. п. равен центральному углу, вершина к-рого находится в центре круговой кривой, а стороны проходят через тангенсы.
Технический железнодорожный словарь. — М.: Государственное транспортное железнодорожное издательство. Н. Н. Васильев, О. Н. Исаакян, Н. О. Рогинский, Я. Б. Смолянский, В. А. Сокович, Т. С. Хачатуров. 1941.
.
- УГОЛ НАБЕГАНИЯ (колеса на рельс)
- УГОЛОК ЖЕСТКОСТИ
Смотреть что такое «УГОЛ ПОВОРОТА» в других словарях:
угол поворота — твёрдого тела; угол поворота Угол между двумя последовательными положениями полуплоскости, неизменно связанной с телом и проходящей через его ось вращения … Политехнический терминологический толковый словарь
угол поворота — Угловое перемещение запирающего или регулирующего элемента, исчисленное от закрытого положения затвора. [ГОСТ Р 52720 2007] Тематики арматура трубопроводная … Справочник технического переводчика
угол поворота — 3.5 угол поворота (steering angle): Общий угол полного отклонения, измеряемый между передними и задними колесами при их перемещении относительно одной или более вертикальной оси из положения обычного прямолинейного движения в положение поворота.… … Словарь-справочник терминов нормативно-технической документации
угол поворота ( e) — 2.3.8 угол поворота ( e): Угол, указывающий расположение светоотражающего материала при помощи соответствующего обозначения с учетом поворота вокруг исходной оси. Источник … Словарь-справочник терминов нормативно-технической документации
угол поворота — posūkio kampas statusas T sritis automatika atitikmenys: angl. angle of rotation; turning angle vok. Drehwinkel, m rus. угол поворота, m pranc. angle de rotation, m … Automatikos terminų žodynas
угол поворота — posūkio kampas statusas T sritis fizika atitikmenys: angl. turn angle; turning angle vok. Drehwinkel, m rus. угол поворота, m pranc. angle de rotation, m … Fizikos terminų žodynas
угол поворота — angle of rotation Угол, на который поворачивается любая линия, жестко связанная со звеном и перпендикулярная оси вращения. Шифр IFToMM: 2.2.28 Раздел: СТРУКТУРА МЕХАНИЗМОВ … Теория механизмов и машин
угол поворота растра — Угол, на который необходимо поворачивать проекционный или контактный растры, а также в издательских системах при растрировании изображений для разных красок (как цветных, так и черно белых оригиналов), чтобы при синтезе изображения на оттиске, с… … Справочник технического переводчика
угол поворота твердого тела — угол поворота Угол между двум и последовательными положениями полуплоскости, неизменно связанной с телом и проходящей через его ось вращения. [Сборник рекомендуемых терминов. Выпуск 102. Теоретическая механика. Академия наук СССР. Комитет научно… … Справочник технического переводчика
угол поворота растра — Угол, на который необходимо поворачивать проекционный или контактный растр, а также в издательских системах – при растрировании изображений для разных красок (как цветных, так и черно белых оригиналов), чтобы при синтезе изображения на оттиске с… … Краткий толковый словарь по полиграфии
dic.academic.ru